Внедрение IIoT позволяет:
осуществлять непрерывный мониторинг оборудования;
переходить от планового к прогнозирующему обслуживанию (Predictive Maintenance);
снижать внеплановые простои;
оптимизировать энергопотребление;
повышать прозрачность производственных процессов;
интегрировать производство с ERP- и MES-системами.
Что такое IIoT и какие задачи он решает
Промышленный интернет вещей (IIoT) — это совокупность технологий, обеспечивающих подключение оборудования и датчиков к сети для сбора, передачи, обработки и анализа данных.
Ключевая задача IIoT — переход от реактивной модели эксплуатации оборудования («сломалось — ремонтируем») к проактивной модели управления активами.
Проблема традиционного подхода
На предприятии с большим количеством сложных машин:
оборудование обслуживается по регламенту, а не по фактическому состоянию;
поломки часто возникают внезапно;
возникают внеплановые простои;
требуется держать избыточный склад запчастей;
увеличиваются эксплуатационные расходы (OPEX).
Как IIoT меняет модель управления
Каждая единица оборудования оснащается датчиками, которые фиксируют:
температуру,
вибрацию,
давление,
ток и напряжение,
скорость вращения,
другие технологические параметры.
Данные передаются на локальные серверы или в облачную инфраструктуру, где автоматически анализируются. При отклонении параметров от нормативных значений система:
уведомляет оператора;
формирует заявку на обслуживание;
может инициировать автоматическое регулирование.
Это позволяет:
предотвратить аварии,
сократить downtime,
снизить стоимость владения оборудованием (TCO).
Прогнозирующее обслуживание: практический пример
Один из наиболее показательных кейсов — авиационная промышленность. Производители двигателей устанавливают независимые каналы связи, предназначенные исключительно для передачи телеметрии наземным службам.
На основе массивов данных строятся аналитические модели, которые прогнозируют:
остаточный ресурс узлов;
вероятность отказа;
оптимальное время замены деталей.
В промышленности аналогичный подход применяет, например, Siemens. На производственных площадках компания внедряет системы датчиков, которые контролируют:
механические параметры станков,
энергопотребление,
режимы загрузки линий.
Если линия простаивает, система автоматически снижает энергопотребление, что напрямую сокращает операционные затраты.
История развития IoT и становление IIoT
Концептуальные предпосылки IoT появились еще в 1980-х годах с развитием сетевых технологий.
Термин «Internet of Things» в 1999 году предложил Kevin Ashton. Он рассматривал применение RFID-меток для отслеживания товаров в цепочках поставок.
Активная фаза развития IoT началась в 2010-х годах благодаря:
удешевлению сенсоров;
распространению беспроводной связи;
развитию облачных платформ;
росту вычислительных мощностей.
В промышленности это привело к формированию концепции IIoT и «умных фабрик» (Smart Factory) в рамках парадигмы Industry 4.0.
Архитектура IIoT: уровни и требования
Типовая архитектура IIoT представляет собой многоуровневую систему.
1. Уровень сенсоров и устройств (Device Layer)
Физический уровень включает:
датчики,
исполнительные механизмы,
контроллеры,
производственное оборудование.
Критические требования:
устойчивость к температуре, пыли, влажности;
виброустойчивость;
низкое энергопотребление;
промышленная степень защиты (IP, EMI/EMC).
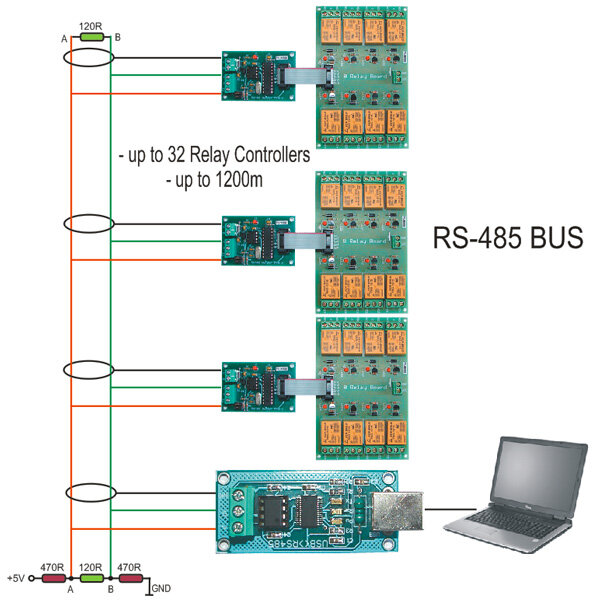
2. Сеть передачи данных (Communication Layer)
Обеспечивает передачу информации между устройствами, edge-узлами и центрами обработки.
Используются:
Ethernet;
Wi-Fi;
4G/5G;
LPWAN;
промышленные протоколы.
Требования:
высокая пропускная способность;
минимальная задержка;
отказоустойчивость;
защищенность передачи данных.
Оборудование промышленного уровня поставляют такие компании, как:
Schneider Electric
Allied Telesis
Moxa
Hirschmann Automation and Control
B&R
Выбор оборудования должен учитывать реальные условия эксплуатации — перепады температур, влажность, вибрации и электромагнитные помехи.
3. Граничные устройства (Edge Layer)
Edge-устройства обрабатывают данные непосредственно на объекте.
Их задачи:
локальная фильтрация и агрегация данных;
анализ в реальном времени;
снижение нагрузки на облако;
обеспечение автономной работы при потере связи.
Обычно поддерживаются протоколы MQTT, OPC UA и другие индустриальные стандарты.
Важно разграничивать:
Edge — анализ и предварительная обработка данных;
PLC/контроллеры — управление оборудованием.
4. Уровень управления (Control Layer)
Включает:
PLC;
SCADA-системы;
MES;
интеграцию с ERP.
Системы класса SCADA обеспечивают диспетчеризацию и визуализацию процессов, а MES — управление производственными операциями.
5. Обработка данных и аналитика (Data & Analytics Layer)
На этом уровне используются:
Big Data;
машинное обучение;
предиктивная аналитика;
цифровые двойники (Digital Twin).
Цель — выявление закономерностей, оптимизация процессов и стратегическое управление активами.
Применение IIoT в различных отраслях
Промышленность и машиностроение
мониторинг станков;
оптимизация производственных линий;
снижение брака;
предиктивное обслуживание.
Особое значение имеют edge-вычисления и отказоустойчивые сети.
Логистика и транспорт
отслеживание транспорта в реальном времени;
контроль состояния грузов;
автоматическое пополнение запасов.
Ключевую роль играют мобильные сети и устойчивость связи при перемещении между зонами покрытия.
Энергетика
мониторинг генерации и распределения;
контроль подстанций;
управление распределенными энергоресурсами;
интеграция ВИЭ.
Системы должны быть масштабируемыми и устойчивыми к тяжелым условиям эксплуатации.
Сельское хозяйство
мониторинг влажности почвы;
контроль микроклимата;
управление сельхозтехникой;
автоматизация полива.
Основной акцент — энергоэффективные беспроводные технологии и автономность.
Преимущества внедрения IIoT
Внедрение промышленного интернета вещей позволяет:
снизить внеплановые простои;
сократить издержки на обслуживание;
уменьшить энергопотребление;
повысить прозрачность процессов;
улучшить управляемость цепочек поставок;
повысить общую операционную эффективность предприятия.
IIoT становится фундаментом цифровой трансформации промышленности и ключевым элементом конкурентоспособности в условиях Industry 4.0.
- 0 comments
- 37 views
-