IThub
Administrators
-
Joined
-
Last visited
Everything posted by IThub
-
 Силовая электроника: между схемотехникой и энергетикойСиловая электроника — область, где электроника управляет реальной мощностью: сотнями ампер, тысячами вольт, мегаваттами. Это регуляторы яркости, частотные преобразователи, зарядные станции для электромобилей, солнечные инверторы, промышленные нагреватели. Ключевое отличие от малосигнальной электроники: КПД критически важен. 99% КПД в источнике 100 кВт означает 1 кВт тепла на радиаторах — и это допустимо. 90% КПД — уже 10 кВт тепловых потерь, требующих серьёзного охлаждения. Тиристор (SCR): управляемый диодТиристор (Silicon Controlled Rectifier, SCR) — четырёхслойный PNPN прибор. Включается коротким импульсом на управляющий электрод (Gate), выключается только при уменьшении тока ниже тока удержания (обычно — переходом через ноль в сети AC). Анод (A) ─── P ─── N ─── P ─── N ─── Катод (K) │ Управляющий электрод (G) Характеристики: Включается: короткий импульс IG > IGT (обычно 10–100 мА) Выключается: ток анода < IH (ток удержания), обычно при переходе AC через ноль Прямое напряжение в открытом состоянии: 1–3В (значительные потери!) Применение: однофазные и трёхфазные выпрямители, регуляторы мощности Фазовое управление тиристоромОсновной метод управления мощностью с тиристором в сети AC: Угол включения α=0°: Полная мощность (100%) Угол включения α=90°: Половинная мощность (~50%) Угол включения α=150°: Малая мощность (~6%) Угол включения α=180°: Минимальная мощность (0%) Средняя мощность ≈ P_max × (1 + cos α) / 2 Схема фазового управления на Arduino/STM32: // Детектор перехода через ноль (Zero-Crossing Detector) // Подключён к INT0 (PD2) через оптопару // При каждом переходе через ноль — прерывание volatile bool zero_cross = false; volatile uint8_t power_pct = 50; // 0-100% // Прерывание от детектора нуля ISR(INT0_vect) // AVR / адаптируй под STM32/ESP32 { zero_cross = true; } void setup() { // Выход на оптотиристор/оптосимистор (через ограничительный резистор ~300Ом) pinMode(9, OUTPUT); digitalWrite(9, LOW); // Прерывание INT0 по фронту (или обоим — зависит от схемы) attachInterrupt(0, zero_cross_ISR, RISING); // Таймер 1: генерирует прерывание через N микросекунд после нуля // Для сети 50 Гц: полупериод = 10 000 мкс // Угол 90° = 5 000 мкс задержка } void zero_cross_ISR() { zero_cross = true; } void loop() { if (zero_cross) { zero_cross = false; // Рассчитываем задержку включения // power_pct = 100 → delay = 0 мкс (включить немедленно) // power_pct = 50 → delay = 5000 мкс (угол 90°) // power_pct = 0 → delay = 10000 мкс (не включать) uint32_t delay_us = (100 - power_pct) * 100; // 0-10000 мкс if (power_pct > 0 && power_pct < 100) { delayMicroseconds(delay_us); // Короткий импульс управления (100-200 мкс достаточно) digitalWrite(9, HIGH); delayMicroseconds(100); digitalWrite(9, LOW); } else if (power_pct >= 100) { digitalWrite(9, HIGH); // Постоянно включено } else { digitalWrite(9, LOW); // Постоянно выключено } } } Проблемы фазового управления: Генерирует гармоники в сети (помехи) Вызывает мигание освещения Создаёт радиопомехи (EMI) Решение для нагревателей: управление по полным полупериодам (Burst Firing) Симистор (TRIAC): для двунаправленного управленияСимистор = два тиристора включённых встречно-параллельно. Проводит ток в ОБОИХ направлениях — идеален для управления нагрузкой переменного тока без выпрямления. MT2 │ ── P ─┤ ── N ─┤── Gate (G) ── P ─┤ ── N ─┤ │ MT1 Управление по нулю (Zero-Crossing Control / Burst Firing)Вместо фазового управления — включаем нагреватель на N полных периодов из M: Мощность 33%: ██░░██░░██░░██░░ (1 из 3 периодов включён) Мощность 50%: ████░░░░████░░░░ (2 из 4 периодов) Мощность 75%: ██████░░██████░░ (3 из 4 периодов) Мощность 100%: ████████████████ (все периоды) Преимущества: нет гармоник, нет EMI, нет щелчков в контакторах. Недостатки: медленнее регулирование (минимальный шаг — полпериода = 10 мс). Оптимально для: промышленные нагреватели, печи сопротивления, ИК-нагреватели. // Burst Firing контроллер class BurstController { private: uint8_t window_size; // Размер окна в полупериодах (например, 20 = 200мс) uint8_t on_count; // Сколько периодов включено uint8_t current_period; // Счётчик текущего периода public: BurstController(uint8_t window = 20) : window_size(window), on_count(0), current_period(0) {} void setPower(float power_pct) { on_count = (uint8_t)(power_pct / 100.0f * window_size + 0.5f); on_count = constrain(on_count, 0, window_size); } // Вызвать при каждом переходе через ноль bool onZeroCross() { bool turn_on = (current_period < on_count); current_period = (current_period + 1) % window_size; return turn_on; } }; BurstController burster(20); // Окно 20 полупериодов = 200 мс void zero_cross_handler() { bool should_be_on = burster.onZeroCross(); digitalWrite(TRIAC_PIN, should_be_on ? HIGH : LOW); } Твёрдотельное реле (SSR): простое решениеSSR (Solid-State Relay) — готовый модуль с тиристором/симистором и оптической развязкой внутри. Управление: 3–32В DC сигнал (совместимо с Arduino/ПЛК), нагрузка: до 40А/480В AC. Выбор SSR: Параметр Рекомендация Ток нагрузки Выбирать с запасом ×2 (40А SSR для 20А нагрузки) Тип управления DC Control (3-32V) для ПЛК, AC Control (90-280V) для PID-регулятора с выходом AC Тип коммутации Zero-Cross для нагревателей, Random Fire для двигателей и трансформаторов Напряжение нагрузки 24-380В AC (проверьте соответствие!) Охлаждение ОБЯЗАТЕЛЬНО радиатор! 0.5°C/Вт для алюминиевого радиатора Тепловой расчёт SSR: def calculate_ssr_heatsink(load_current_a: float, ambient_temp_c: float = 40.0, max_case_temp_c: float = 80.0) -> dict: """ Расчёт требуемого теплового сопротивления радиатора для SSR. SSR: прямое напряжение ~1.2В (Fotek, Crydom) """ # Тепловыделение SSR vf = 1.2 # В, прямое падение на симисторе p_loss = vf * load_current_a # Вт # Тепловое сопротивление корпус-радиатор (junction-to-case): ~0.5°C/Вт rth_jc = 0.5 # °C/W (из datasheet) # Максимальная температура p-n перехода обычно 125°C t_junction_max = 125.0 # Требуемое тепловое сопротивление радиатор-воздух # T_ambient + P × (Rth_jc + Rth_heatsink) = T_case_max rth_heatsink = (max_case_temp_c - ambient_temp_c) / p_loss - rth_jc # Размер алюминиевого радиатора (грубая оценка): # R_th ≈ 50 / (площадь_см²) для вертикального расположения heatsink_area_cm2 = 50.0 / rth_heatsink if rth_heatsink > 0 else float('inf') return { 'load_current_a': load_current_a, 'power_loss_w': round(p_loss, 1), 'rth_heatsink': round(rth_heatsink, 2), 'heatsink_area_cm2': round(heatsink_area_cm2, 0), 'safe_operation': rth_heatsink > 0, } # Пример: SSR 25А нагрузки при T_окр=40°C result = calculate_ssr_heatsink(25.0) print(f"Потери: {result['power_loss_w']} Вт") print(f"Требуется радиатор: {result['heatsink_area_cm2']} см²") # Результат: 30 Вт потерь, нужен радиатор ~150 см² IGBT: для высоких частот и больших мощностейIGBT (Insulated Gate Bipolar Transistor) — гибрид MOSFET и биполярного транзистора. Управляется напряжением (как MOSFET), но имеет низкое напряжение насыщения при больших токах (как биполярный). Где используется: Частотные преобразователи (инвертор моста) ИБП и стабилизаторы Сварочные аппараты Индукционные нагреватели Зарядные станции для электромобилей Ключевые характеристики при выборе IGBT:Vce_max — максимальное напряжение коллектор-эмиттер (выбирать ×2 от напряжения шины!) Ic_max — максимальный ток (с учётом теплового сопротивления!) Vce(sat) — напряжение насыщения (потери в открытом состоянии) Eoff/Eon — энергия переключения (потери на коммутацию, растут с частотой!) toff — время выключения (ограничивает максимальную частоту ШИМ) Расчёт потерь IGBT: def calculate_igbt_losses(vce_sat: float, ic_rms: float, e_on_j: float, e_off_j: float, fsw_hz: float, duty: float) -> dict: """ Расчёт потерь IGBT. vce_sat: напряжение насыщения, В (из datasheet при Ic и Tj) ic_rms: действующий ток коллектора, А e_on_j: энергия включения, Дж (из datasheet) e_off_j: энергия выключения, Дж fsw_hz: частота коммутации, Гц duty: скважность ШИМ (0..1) """ # Потери проводимости (conduction losses) # P_cond = Vce_sat × Ic_avg ic_avg = ic_rms * duty # Упрощение для прямоугольного тока p_cond = vce_sat * ic_avg # Потери переключения (switching losses) # P_sw = (E_on + E_off) × fsw p_sw = (e_on_j + e_off_j) * fsw_hz # Суммарные потери p_total = p_cond + p_sw return { 'conduction_w': round(p_cond, 2), 'switching_w': round(p_sw, 2), 'total_w': round(p_total, 2), 'efficiency_pct': round((1 - p_total / (vce_sat * ic_rms + p_total)) * 100, 1), } # Пример: IGBT 1200В/50А в инверторе 400В # Частотник 11 кВт: Idc ≈ 30А, fsw=8кГц, d=0.8 losses = calculate_igbt_losses( vce_sat = 2.0, # В при 125°C ic_rms = 30.0, # А e_on_j = 0.8e-3, # 0.8 мДж e_off_j = 1.2e-3, # 1.2 мДж fsw_hz = 8000, # 8 кГц duty = 0.8 ) print(f"Потери проводимости: {losses['conduction_w']} Вт") print(f"Потери переключения: {losses['switching_w']} Вт") print(f"Итого: {losses['total_w']} Вт") # При 6 IGBT в трёхфазном мосте: ×6 = итоговые потери инвертора Снабберные цепи: защита от перенапряженийПри выключении IGBT/тиристора индуктивная нагрузка создаёт выброс напряжения: V_spike = L × dI/dt. Без защиты — мгновенная смерть транзистора. RC-снаббер (для симистора):Нагрузка │ [Симистор] │ ───────── ← RC снаббер параллельно симистору │ │ [R ~47 Ом] [C ~47 нФ, 630В] │ │ ───────── │ GND Расчёт RC-снаббера: def calculate_rc_snubber(load_inductance_h: float, switch_current_a: float, supply_voltage_v: float) -> dict: """ Расчёт RC-снаббера для тиристора/симистора. Критерий: выброс напряжения ≤ 2 × Vsupply """ import math # Пиковое напряжение без снаббера # V_peak ≈ V_supply + I × sqrt(L/C_parasitic) # С снаббером ограничиваем до 2×V_supply v_max = 2 * supply_voltage_v # Ёмкость снаббера (минимальная для ограничения выброса) # C ≥ L × I² / (V_max - V_supply)² delta_v = v_max - supply_voltage_v c_min = load_inductance_h * switch_current_a**2 / delta_v**2 c_snubber = c_min * 2 # Запас × 2, нормализуем до стандартного ряда E12 # Стандартный ряд конденсаторов (нФ) e12 = [10, 12, 15, 18, 22, 27, 33, 39, 47, 56, 68, 82] c_nf = c_snubber * 1e9 c_standard_nf = min(e12, key=lambda x: abs(x - c_nf)) # Если нет в ряду — берём следующий больший for val in sorted(e12): if val >= c_nf: c_standard_nf = val break c_actual = c_standard_nf * 1e-9 # Сопротивление снаббера # R ≈ sqrt(L/C) для критического затухания r_critical = math.sqrt(load_inductance_h / c_actual) r_snubber = r_critical # Или немного больше для надёжности # Мощность резистора # P = 0.5 × C × V² × f (для каждого переключения) # Для AC 50Гц: f = 100 (2 перехода через ноль) p_resistor = 0.5 * c_actual * supply_voltage_v**2 * 100 return { 'C_nF': c_standard_nf, 'C_voltage': f"{int(v_max * 1.5 / 100) * 100}В", # Округляем до стандарта 'R_ohm': round(r_snubber, 0), 'R_watts': round(p_resistor * 2, 1), # Запас × 2 } # Пример: управление нагревателем 5 кВт через симистор # Нагреватель = почти чисто активная нагрузка, но есть монтажная индуктивность ~10 мкГн result = calculate_rc_snubber(10e-6, 22.7, 220) print(f"Снаббер: R={result['R_ohm']} Ом/{result['R_watts']} Вт, " f"C={result['C_nF']} нФ/{result['C_voltage']}") Трёхфазное управление нагревателямиДля трёхфазных печей и нагревателей используют 3 SSR (по одному на каждую фазу) или специализированные трёхфазные тиристорные модули: L1 ──[SSR_A]──┐ L2 ──[SSR_B]──┼── Нагреватели (треугольник или звезда) L3 ──[SSR_C]──┘ ↑ ↑ ↑ Сигналы управления с ПЛК/контроллера Управление: все три SSR получают одинаковый сигнал (одновременно вкл/выкл) → симметричная нагрузка, нет перекоса фаз Или: поочерёдное включение фаз (phase rotation) → снижает пиковый ток пуска Алгоритм ПИД для температуры печи с трёхфазным нагревателем: class FurnaceController: """Контроллер температуры трёхфазной печи""" def __init__(self, kp=5.0, ki=0.1, kd=2.0, max_power=100.0): self.pid = PIDController(kp, ki, kd, ts=1.0, out_min=0, out_max=max_power) self.setpoint = 0.0 # Защиты self.max_temp = 1200.0 # °C максимум печи self.fault = False def control_cycle(self, temp_actual: float) -> dict: """Один цикл управления (вызывать каждую секунду)""" # Защита по превышению температуры if temp_actual > self.max_temp: self.fault = True if self.fault: return {'ssr_output': 0.0, 'fault': True, 'temp': temp_actual} # ПИД self.pid.set_setpoint(self.setpoint) power_pct = self.pid.compute(temp_actual) # Мощность → количество периодов включения (Burst Fire) # Окно 10 полупериодов = 100 мс on_periods = int(power_pct / 100 * 10 + 0.5) return { 'ssr_output': power_pct, 'on_periods': on_periods, # из 10 'setpoint': self.setpoint, 'temp_actual': temp_actual, 'error': self.setpoint - temp_actual, 'fault': False, } Тепловой расчёт: как не сжечь компонентыТепловая цепь аналогична электрической: Температура ↔ Напряжение Мощность потерь ↔ Ток Тепловое сопротивление Rth ↔ Электрическое сопротивление T_junction = T_ambient + P_loss × (Rth_j-c + Rth_c-hs + Rth_hs-a) Где: Rth_j-c — тепловое сопротивление кристалл→корпус (из datasheet) Rth_c-hs — корпус→радиатор (зависит от термопасты, ~0.1–0.5 °C/Вт) Rth_hs-a — радиатор→воздух (зависит от размера и обдува) def thermal_check(p_loss_w: float, t_ambient_c: float, rth_jc: float, rth_chs: float, rth_hsa: float, t_junction_max: float = 125.0) -> dict: """ Проверка теплового режима силового прибора. """ rth_total = rth_jc + rth_chs + rth_hsa t_junction = t_ambient_c + p_loss_w * rth_total t_case = t_ambient_c + p_loss_w * rth_hsa # Температура корпуса margin = t_junction_max - t_junction safe = margin > 10.0 # Запас минимум 10°C return { 'T_junction_c': round(t_junction, 1), 'T_case_c': round(t_case, 1), 'margin_c': round(margin, 1), 'safe': safe, 'warning': not safe, } # Проверка SSR 30А: result = thermal_check( p_loss_w = 1.2 * 25, # 1.2В × 25А = 30 Вт t_ambient_c = 40.0, rth_jc = 0.5, # из datasheet Fotek SSR-40DA rth_chs = 0.2, # хорошая термопаста rth_hsa = 1.5, # алюминиевый радиатор 150 см² ) print(f"Температура перехода: {result['T_junction_c']}°C") print(f"Запас: {result['margin_c']}°C — {'OK' if result['safe'] else 'ОПАСНО!'}") Типичные ошибки в силовой электроникеНет снаббера на индуктивной нагрузке → выброс напряжения → смерть тиристора SSR без радиатора → перегрев за несколько минут при токе > 5А Управляющий сигнал без оптической развязки → 220В на Arduino/ПЛК = конец Не проверена полярность тиристора → не переключается или горит сразу Фазовое управление на трансформаторную нагрузку → насыщение сердечника IGBT с Vce_max = Vsupply → первый же выброс убивает → минимум ×2 запас ЗаключениеСиловая электроника — область, где цена ошибки высока: сгоревший IGBT, пожар, травма. Всегда работайте с полной изоляцией от сети, используйте изолирующие трансформаторы при разработке, не экономьте на снабберах и радиаторах. Для начала: освойте управление нагревателем через SSR и ПИД-регулятор — это самая распространённая и безопасная задача. Потом — изучите теорию тиристорного управления. После этого — IGBT в H-мостах для двигателей. И только с хорошей теоретической базой — трёхфазные инверторы. Измерительный осциллограф с изолированными щупами и клещи-амперметр — ваши обязательные инструменты в этой области. Без возможности видеть что происходит на осциллографе — работать в силовой электронике вслепую.
Силовая электроника: между схемотехникой и энергетикойСиловая электроника — область, где электроника управляет реальной мощностью: сотнями ампер, тысячами вольт, мегаваттами. Это регуляторы яркости, частотные преобразователи, зарядные станции для электромобилей, солнечные инверторы, промышленные нагреватели. Ключевое отличие от малосигнальной электроники: КПД критически важен. 99% КПД в источнике 100 кВт означает 1 кВт тепла на радиаторах — и это допустимо. 90% КПД — уже 10 кВт тепловых потерь, требующих серьёзного охлаждения. Тиристор (SCR): управляемый диодТиристор (Silicon Controlled Rectifier, SCR) — четырёхслойный PNPN прибор. Включается коротким импульсом на управляющий электрод (Gate), выключается только при уменьшении тока ниже тока удержания (обычно — переходом через ноль в сети AC). Анод (A) ─── P ─── N ─── P ─── N ─── Катод (K) │ Управляющий электрод (G) Характеристики: Включается: короткий импульс IG > IGT (обычно 10–100 мА) Выключается: ток анода < IH (ток удержания), обычно при переходе AC через ноль Прямое напряжение в открытом состоянии: 1–3В (значительные потери!) Применение: однофазные и трёхфазные выпрямители, регуляторы мощности Фазовое управление тиристоромОсновной метод управления мощностью с тиристором в сети AC: Угол включения α=0°: Полная мощность (100%) Угол включения α=90°: Половинная мощность (~50%) Угол включения α=150°: Малая мощность (~6%) Угол включения α=180°: Минимальная мощность (0%) Средняя мощность ≈ P_max × (1 + cos α) / 2 Схема фазового управления на Arduino/STM32: // Детектор перехода через ноль (Zero-Crossing Detector) // Подключён к INT0 (PD2) через оптопару // При каждом переходе через ноль — прерывание volatile bool zero_cross = false; volatile uint8_t power_pct = 50; // 0-100% // Прерывание от детектора нуля ISR(INT0_vect) // AVR / адаптируй под STM32/ESP32 { zero_cross = true; } void setup() { // Выход на оптотиристор/оптосимистор (через ограничительный резистор ~300Ом) pinMode(9, OUTPUT); digitalWrite(9, LOW); // Прерывание INT0 по фронту (или обоим — зависит от схемы) attachInterrupt(0, zero_cross_ISR, RISING); // Таймер 1: генерирует прерывание через N микросекунд после нуля // Для сети 50 Гц: полупериод = 10 000 мкс // Угол 90° = 5 000 мкс задержка } void zero_cross_ISR() { zero_cross = true; } void loop() { if (zero_cross) { zero_cross = false; // Рассчитываем задержку включения // power_pct = 100 → delay = 0 мкс (включить немедленно) // power_pct = 50 → delay = 5000 мкс (угол 90°) // power_pct = 0 → delay = 10000 мкс (не включать) uint32_t delay_us = (100 - power_pct) * 100; // 0-10000 мкс if (power_pct > 0 && power_pct < 100) { delayMicroseconds(delay_us); // Короткий импульс управления (100-200 мкс достаточно) digitalWrite(9, HIGH); delayMicroseconds(100); digitalWrite(9, LOW); } else if (power_pct >= 100) { digitalWrite(9, HIGH); // Постоянно включено } else { digitalWrite(9, LOW); // Постоянно выключено } } } Проблемы фазового управления: Генерирует гармоники в сети (помехи) Вызывает мигание освещения Создаёт радиопомехи (EMI) Решение для нагревателей: управление по полным полупериодам (Burst Firing) Симистор (TRIAC): для двунаправленного управленияСимистор = два тиристора включённых встречно-параллельно. Проводит ток в ОБОИХ направлениях — идеален для управления нагрузкой переменного тока без выпрямления. MT2 │ ── P ─┤ ── N ─┤── Gate (G) ── P ─┤ ── N ─┤ │ MT1 Управление по нулю (Zero-Crossing Control / Burst Firing)Вместо фазового управления — включаем нагреватель на N полных периодов из M: Мощность 33%: ██░░██░░██░░██░░ (1 из 3 периодов включён) Мощность 50%: ████░░░░████░░░░ (2 из 4 периодов) Мощность 75%: ██████░░██████░░ (3 из 4 периодов) Мощность 100%: ████████████████ (все периоды) Преимущества: нет гармоник, нет EMI, нет щелчков в контакторах. Недостатки: медленнее регулирование (минимальный шаг — полпериода = 10 мс). Оптимально для: промышленные нагреватели, печи сопротивления, ИК-нагреватели. // Burst Firing контроллер class BurstController { private: uint8_t window_size; // Размер окна в полупериодах (например, 20 = 200мс) uint8_t on_count; // Сколько периодов включено uint8_t current_period; // Счётчик текущего периода public: BurstController(uint8_t window = 20) : window_size(window), on_count(0), current_period(0) {} void setPower(float power_pct) { on_count = (uint8_t)(power_pct / 100.0f * window_size + 0.5f); on_count = constrain(on_count, 0, window_size); } // Вызвать при каждом переходе через ноль bool onZeroCross() { bool turn_on = (current_period < on_count); current_period = (current_period + 1) % window_size; return turn_on; } }; BurstController burster(20); // Окно 20 полупериодов = 200 мс void zero_cross_handler() { bool should_be_on = burster.onZeroCross(); digitalWrite(TRIAC_PIN, should_be_on ? HIGH : LOW); } Твёрдотельное реле (SSR): простое решениеSSR (Solid-State Relay) — готовый модуль с тиристором/симистором и оптической развязкой внутри. Управление: 3–32В DC сигнал (совместимо с Arduino/ПЛК), нагрузка: до 40А/480В AC. Выбор SSR: Параметр Рекомендация Ток нагрузки Выбирать с запасом ×2 (40А SSR для 20А нагрузки) Тип управления DC Control (3-32V) для ПЛК, AC Control (90-280V) для PID-регулятора с выходом AC Тип коммутации Zero-Cross для нагревателей, Random Fire для двигателей и трансформаторов Напряжение нагрузки 24-380В AC (проверьте соответствие!) Охлаждение ОБЯЗАТЕЛЬНО радиатор! 0.5°C/Вт для алюминиевого радиатора Тепловой расчёт SSR: def calculate_ssr_heatsink(load_current_a: float, ambient_temp_c: float = 40.0, max_case_temp_c: float = 80.0) -> dict: """ Расчёт требуемого теплового сопротивления радиатора для SSR. SSR: прямое напряжение ~1.2В (Fotek, Crydom) """ # Тепловыделение SSR vf = 1.2 # В, прямое падение на симисторе p_loss = vf * load_current_a # Вт # Тепловое сопротивление корпус-радиатор (junction-to-case): ~0.5°C/Вт rth_jc = 0.5 # °C/W (из datasheet) # Максимальная температура p-n перехода обычно 125°C t_junction_max = 125.0 # Требуемое тепловое сопротивление радиатор-воздух # T_ambient + P × (Rth_jc + Rth_heatsink) = T_case_max rth_heatsink = (max_case_temp_c - ambient_temp_c) / p_loss - rth_jc # Размер алюминиевого радиатора (грубая оценка): # R_th ≈ 50 / (площадь_см²) для вертикального расположения heatsink_area_cm2 = 50.0 / rth_heatsink if rth_heatsink > 0 else float('inf') return { 'load_current_a': load_current_a, 'power_loss_w': round(p_loss, 1), 'rth_heatsink': round(rth_heatsink, 2), 'heatsink_area_cm2': round(heatsink_area_cm2, 0), 'safe_operation': rth_heatsink > 0, } # Пример: SSR 25А нагрузки при T_окр=40°C result = calculate_ssr_heatsink(25.0) print(f"Потери: {result['power_loss_w']} Вт") print(f"Требуется радиатор: {result['heatsink_area_cm2']} см²") # Результат: 30 Вт потерь, нужен радиатор ~150 см² IGBT: для высоких частот и больших мощностейIGBT (Insulated Gate Bipolar Transistor) — гибрид MOSFET и биполярного транзистора. Управляется напряжением (как MOSFET), но имеет низкое напряжение насыщения при больших токах (как биполярный). Где используется: Частотные преобразователи (инвертор моста) ИБП и стабилизаторы Сварочные аппараты Индукционные нагреватели Зарядные станции для электромобилей Ключевые характеристики при выборе IGBT:Vce_max — максимальное напряжение коллектор-эмиттер (выбирать ×2 от напряжения шины!) Ic_max — максимальный ток (с учётом теплового сопротивления!) Vce(sat) — напряжение насыщения (потери в открытом состоянии) Eoff/Eon — энергия переключения (потери на коммутацию, растут с частотой!) toff — время выключения (ограничивает максимальную частоту ШИМ) Расчёт потерь IGBT: def calculate_igbt_losses(vce_sat: float, ic_rms: float, e_on_j: float, e_off_j: float, fsw_hz: float, duty: float) -> dict: """ Расчёт потерь IGBT. vce_sat: напряжение насыщения, В (из datasheet при Ic и Tj) ic_rms: действующий ток коллектора, А e_on_j: энергия включения, Дж (из datasheet) e_off_j: энергия выключения, Дж fsw_hz: частота коммутации, Гц duty: скважность ШИМ (0..1) """ # Потери проводимости (conduction losses) # P_cond = Vce_sat × Ic_avg ic_avg = ic_rms * duty # Упрощение для прямоугольного тока p_cond = vce_sat * ic_avg # Потери переключения (switching losses) # P_sw = (E_on + E_off) × fsw p_sw = (e_on_j + e_off_j) * fsw_hz # Суммарные потери p_total = p_cond + p_sw return { 'conduction_w': round(p_cond, 2), 'switching_w': round(p_sw, 2), 'total_w': round(p_total, 2), 'efficiency_pct': round((1 - p_total / (vce_sat * ic_rms + p_total)) * 100, 1), } # Пример: IGBT 1200В/50А в инверторе 400В # Частотник 11 кВт: Idc ≈ 30А, fsw=8кГц, d=0.8 losses = calculate_igbt_losses( vce_sat = 2.0, # В при 125°C ic_rms = 30.0, # А e_on_j = 0.8e-3, # 0.8 мДж e_off_j = 1.2e-3, # 1.2 мДж fsw_hz = 8000, # 8 кГц duty = 0.8 ) print(f"Потери проводимости: {losses['conduction_w']} Вт") print(f"Потери переключения: {losses['switching_w']} Вт") print(f"Итого: {losses['total_w']} Вт") # При 6 IGBT в трёхфазном мосте: ×6 = итоговые потери инвертора Снабберные цепи: защита от перенапряженийПри выключении IGBT/тиристора индуктивная нагрузка создаёт выброс напряжения: V_spike = L × dI/dt. Без защиты — мгновенная смерть транзистора. RC-снаббер (для симистора):Нагрузка │ [Симистор] │ ───────── ← RC снаббер параллельно симистору │ │ [R ~47 Ом] [C ~47 нФ, 630В] │ │ ───────── │ GND Расчёт RC-снаббера: def calculate_rc_snubber(load_inductance_h: float, switch_current_a: float, supply_voltage_v: float) -> dict: """ Расчёт RC-снаббера для тиристора/симистора. Критерий: выброс напряжения ≤ 2 × Vsupply """ import math # Пиковое напряжение без снаббера # V_peak ≈ V_supply + I × sqrt(L/C_parasitic) # С снаббером ограничиваем до 2×V_supply v_max = 2 * supply_voltage_v # Ёмкость снаббера (минимальная для ограничения выброса) # C ≥ L × I² / (V_max - V_supply)² delta_v = v_max - supply_voltage_v c_min = load_inductance_h * switch_current_a**2 / delta_v**2 c_snubber = c_min * 2 # Запас × 2, нормализуем до стандартного ряда E12 # Стандартный ряд конденсаторов (нФ) e12 = [10, 12, 15, 18, 22, 27, 33, 39, 47, 56, 68, 82] c_nf = c_snubber * 1e9 c_standard_nf = min(e12, key=lambda x: abs(x - c_nf)) # Если нет в ряду — берём следующий больший for val in sorted(e12): if val >= c_nf: c_standard_nf = val break c_actual = c_standard_nf * 1e-9 # Сопротивление снаббера # R ≈ sqrt(L/C) для критического затухания r_critical = math.sqrt(load_inductance_h / c_actual) r_snubber = r_critical # Или немного больше для надёжности # Мощность резистора # P = 0.5 × C × V² × f (для каждого переключения) # Для AC 50Гц: f = 100 (2 перехода через ноль) p_resistor = 0.5 * c_actual * supply_voltage_v**2 * 100 return { 'C_nF': c_standard_nf, 'C_voltage': f"{int(v_max * 1.5 / 100) * 100}В", # Округляем до стандарта 'R_ohm': round(r_snubber, 0), 'R_watts': round(p_resistor * 2, 1), # Запас × 2 } # Пример: управление нагревателем 5 кВт через симистор # Нагреватель = почти чисто активная нагрузка, но есть монтажная индуктивность ~10 мкГн result = calculate_rc_snubber(10e-6, 22.7, 220) print(f"Снаббер: R={result['R_ohm']} Ом/{result['R_watts']} Вт, " f"C={result['C_nF']} нФ/{result['C_voltage']}") Трёхфазное управление нагревателямиДля трёхфазных печей и нагревателей используют 3 SSR (по одному на каждую фазу) или специализированные трёхфазные тиристорные модули: L1 ──[SSR_A]──┐ L2 ──[SSR_B]──┼── Нагреватели (треугольник или звезда) L3 ──[SSR_C]──┘ ↑ ↑ ↑ Сигналы управления с ПЛК/контроллера Управление: все три SSR получают одинаковый сигнал (одновременно вкл/выкл) → симметричная нагрузка, нет перекоса фаз Или: поочерёдное включение фаз (phase rotation) → снижает пиковый ток пуска Алгоритм ПИД для температуры печи с трёхфазным нагревателем: class FurnaceController: """Контроллер температуры трёхфазной печи""" def __init__(self, kp=5.0, ki=0.1, kd=2.0, max_power=100.0): self.pid = PIDController(kp, ki, kd, ts=1.0, out_min=0, out_max=max_power) self.setpoint = 0.0 # Защиты self.max_temp = 1200.0 # °C максимум печи self.fault = False def control_cycle(self, temp_actual: float) -> dict: """Один цикл управления (вызывать каждую секунду)""" # Защита по превышению температуры if temp_actual > self.max_temp: self.fault = True if self.fault: return {'ssr_output': 0.0, 'fault': True, 'temp': temp_actual} # ПИД self.pid.set_setpoint(self.setpoint) power_pct = self.pid.compute(temp_actual) # Мощность → количество периодов включения (Burst Fire) # Окно 10 полупериодов = 100 мс on_periods = int(power_pct / 100 * 10 + 0.5) return { 'ssr_output': power_pct, 'on_periods': on_periods, # из 10 'setpoint': self.setpoint, 'temp_actual': temp_actual, 'error': self.setpoint - temp_actual, 'fault': False, } Тепловой расчёт: как не сжечь компонентыТепловая цепь аналогична электрической: Температура ↔ Напряжение Мощность потерь ↔ Ток Тепловое сопротивление Rth ↔ Электрическое сопротивление T_junction = T_ambient + P_loss × (Rth_j-c + Rth_c-hs + Rth_hs-a) Где: Rth_j-c — тепловое сопротивление кристалл→корпус (из datasheet) Rth_c-hs — корпус→радиатор (зависит от термопасты, ~0.1–0.5 °C/Вт) Rth_hs-a — радиатор→воздух (зависит от размера и обдува) def thermal_check(p_loss_w: float, t_ambient_c: float, rth_jc: float, rth_chs: float, rth_hsa: float, t_junction_max: float = 125.0) -> dict: """ Проверка теплового режима силового прибора. """ rth_total = rth_jc + rth_chs + rth_hsa t_junction = t_ambient_c + p_loss_w * rth_total t_case = t_ambient_c + p_loss_w * rth_hsa # Температура корпуса margin = t_junction_max - t_junction safe = margin > 10.0 # Запас минимум 10°C return { 'T_junction_c': round(t_junction, 1), 'T_case_c': round(t_case, 1), 'margin_c': round(margin, 1), 'safe': safe, 'warning': not safe, } # Проверка SSR 30А: result = thermal_check( p_loss_w = 1.2 * 25, # 1.2В × 25А = 30 Вт t_ambient_c = 40.0, rth_jc = 0.5, # из datasheet Fotek SSR-40DA rth_chs = 0.2, # хорошая термопаста rth_hsa = 1.5, # алюминиевый радиатор 150 см² ) print(f"Температура перехода: {result['T_junction_c']}°C") print(f"Запас: {result['margin_c']}°C — {'OK' if result['safe'] else 'ОПАСНО!'}") Типичные ошибки в силовой электроникеНет снаббера на индуктивной нагрузке → выброс напряжения → смерть тиристора SSR без радиатора → перегрев за несколько минут при токе > 5А Управляющий сигнал без оптической развязки → 220В на Arduino/ПЛК = конец Не проверена полярность тиристора → не переключается или горит сразу Фазовое управление на трансформаторную нагрузку → насыщение сердечника IGBT с Vce_max = Vsupply → первый же выброс убивает → минимум ×2 запас ЗаключениеСиловая электроника — область, где цена ошибки высока: сгоревший IGBT, пожар, травма. Всегда работайте с полной изоляцией от сети, используйте изолирующие трансформаторы при разработке, не экономьте на снабберах и радиаторах. Для начала: освойте управление нагревателем через SSR и ПИД-регулятор — это самая распространённая и безопасная задача. Потом — изучите теорию тиристорного управления. После этого — IGBT в H-мостах для двигателей. И только с хорошей теоретической базой — трёхфазные инверторы. Измерительный осциллограф с изолированными щупами и клещи-амперметр — ваши обязательные инструменты в этой области. Без возможности видеть что происходит на осциллографе — работать в силовой электронике вслепую. -
 Python — второй язык каждого инженераMatlab стоит дорого. LabVIEW — ещё дороже. Excel мощный, но у него есть потолок. Python — бесплатный, открытый, с огромной экосистемой библиотек для инженерных задач. И с каждым годом он глубже проникает в промышленность. Инженер-электронщик использует Python для: анализа данных с измерительных приборов, автоматизации рутинных расчётов, создания отчётов, обработки сигналов с АЦП, управления лабораторным оборудованием (VISA/PyVISA), прототипирования алгоритмов перед переносом на микроконтроллер. Специалист АСУ ТП — для: работы с Modbus/OPC UA, парсинга логов ПЛК, автоматического тестирования, интеграции различных систем. NumPy: числа быстроNumPy — фундамент научного Python. Массивы NumPy в 10–100 раз быстрее списков Python для математических операций. import numpy as np import time # ===== БАЗОВЫЕ ОПЕРАЦИИ ===== # Создание массивов t = np.linspace(0, 10, 1000) # 1000 точек от 0 до 10 f = np.arange(0, 50, 0.1) # От 0 до 50 с шагом 0.1 zeros = np.zeros((3, 4)) # Матрица 3×4 из нулей eye = np.eye(3) # Единичная матрица 3×3 # Синтетический сигнал (для теста) freq_signal = 50.0 # Гц freq_noise = 200.0 # Гц (помеха) sample_rate = 1000.0 # Гц t = np.arange(0, 1, 1/sample_rate) # 1 секунда данных signal_clean = 2.0 * np.sin(2 * np.pi * freq_signal * t) noise = 0.5 * np.sin(2 * np.pi * freq_noise * t) noise += 0.2 * np.random.randn(len(t)) # Белый шум signal_noisy = signal_clean + noise # ===== СКОРОСТЬ ===== def python_rms(data: list) -> float: return (sum(x**2 for x in data) / len(data)) ** 0.5 def numpy_rms(data: np.ndarray) -> float: return np.sqrt(np.mean(data**2)) # Сравнение скорости: data_list = list(signal_noisy) data_arr = np.array(data_list) t0 = time.time(); python_rms(data_list); t_py = time.time() - t0 t0 = time.time(); numpy_rms(data_arr); t_np = time.time() - t0 print(f"Python: {t_py*1000:.2f} мс, NumPy: {t_np*1000:.3f} мс, " f"Ускорение: {t_py/t_np:.0f}x") # ===== ИНЖЕНЕРНЫЕ РАСЧЁТЫ ===== def calculate_power_factor(voltage: np.ndarray, current: np.ndarray, sample_rate: float) -> dict: """ Расчёт коэффициента мощности из осциллограмм тока и напряжения. """ # RMS значения V_rms = np.sqrt(np.mean(voltage**2)) I_rms = np.sqrt(np.mean(current**2)) # Активная мощность (среднее произведение) P = np.mean(voltage * current) # Полная мощность S = V_rms * I_rms # Коэффициент мощности pf = P / S if S > 0 else 0 # Реактивная мощность Q = np.sqrt(max(0, S**2 - P**2)) return { 'V_rms': round(V_rms, 2), 'I_rms': round(I_rms, 3), 'P_kw': round(P / 1000, 2), 'Q_kvar': round(Q / 1000, 2), 'S_kva': round(S / 1000, 2), 'PF': round(abs(pf), 3), } # Пример использования: # Генерируем тестовые сигналы 220В 50Гц, ток 10А с φ=30° t = np.linspace(0, 0.04, 400) # 2 периода V = 220 * np.sqrt(2) * np.sin(2 * np.pi * 50 * t) I = 10 * np.sqrt(2) * np.sin(2 * np.pi * 50 * t - np.radians(30)) power = calculate_power_factor(V, I, 10000) print(f"P={power['P_kw']} кВт, Q={power['Q_kvar']} квар, cos(φ)={power['PF']}") # Ожидаем: cos(30°) ≈ 0.866 Scipy: анализ сигналовfrom scipy import signal, fft import numpy as np # ===== FFT: СПЕКТРАЛЬНЫЙ АНАЛИЗ ===== def analyze_spectrum(data: np.ndarray, sample_rate: float) -> dict: """ Анализ спектра сигнала через FFT. Используется для диагностики вибраций, качества электроэнергии. """ n = len(data) # Оконная функция (Hanning) для уменьшения спектральных утечек window = np.hanning(n) data_windowed = data * window # FFT spectrum = np.abs(fft.rfft(data_windowed)) freqs = fft.rfftfreq(n, 1.0/sample_rate) # Нормировка (учёт оконной функции) spectrum = spectrum / (n / 2) # THD (Total Harmonic Distortion) — для качества сетевого напряжения # Находим основную частоту (50 Гц) fundamental_idx = np.argmin(np.abs(freqs - 50.0)) fundamental_amp = spectrum[fundamental_idx] # Гармоники 2-я...7-я harmonic_power = sum( spectrum[np.argmin(np.abs(freqs - 50.0 * n))]**2 for n in range(2, 8) ) thd = np.sqrt(harmonic_power) / fundamental_amp * 100 # % # Топ-5 пиков спектра peak_indices = np.argsort(spectrum)[-10:][::-1] top_peaks = [(round(freqs[i], 1), round(spectrum[i], 4)) for i in peak_indices] return { 'freqs': freqs, 'spectrum': spectrum, 'thd_pct': round(thd, 2), 'top_peaks': top_peaks[:5], 'rms': round(np.sqrt(np.mean(data**2)), 4), } # ===== ФИЛЬТРАЦИЯ СИГНАЛОВ ===== def design_lowpass_filter(cutoff_hz: float, sample_rate: float, order: int = 4) -> tuple: """ Проектирование фильтра нижних частот Баттерворта. Используется для сглаживания зашумлённых данных датчиков. """ nyquist = sample_rate / 2 normalized_cutoff = cutoff_hz / nyquist b, a = signal.butter(order, normalized_cutoff, btype='low', analog=False) return b, a def apply_filter(data: np.ndarray, b: np.ndarray, a: np.ndarray, zero_phase: bool = True) -> np.ndarray: """ Применение фильтра к сигналу. zero_phase=True: filtfilt (нет фазового сдвига, требует данных полностью) zero_phase=False: lfilter (реального времени, есть фазовый сдвиг) """ if zero_phase: return signal.filtfilt(b, a, data) # Двупроходной (офлайн-обработка) else: return signal.lfilter(b, a, data) # Однопроходной (онлайн-обработка) # Пример: фильтрация зашумлённого датчика температуры sample_rate = 100.0 # 100 Гц t = np.arange(0, 10, 1/sample_rate) # Реальная температура (медленно меняется) true_temp = 75.0 + 5.0 * np.sin(2 * np.pi * 0.1 * t) # 0.1 Гц # С шумом (50Гц помеха от сети + белый шум) noisy_temp = true_temp + 2.0 * np.sin(2 * np.pi * 50 * t) + \ 0.5 * np.random.randn(len(t)) # Фильтр НЧ с частотой среза 1 Гц (убираем всё выше 1 Гц) b, a = design_lowpass_filter(cutoff_hz=1.0, sample_rate=sample_rate) filtered_temp = apply_filter(noisy_temp, b, a) print(f"Шум до фильтрации: {np.std(noisy_temp - true_temp):.3f}°C") print(f"Шум после фильтра: {np.std(filtered_temp - true_temp):.3f}°C") # ===== КОРРЕЛЯЦИЯ И ОБНАРУЖЕНИЕ СИГНАЛА ===== def find_pattern_in_signal(signal_data: np.ndarray, pattern: np.ndarray) -> list[int]: """ Поиск паттерна в сигнале через кросс-корреляцию. Применение: нахождение пакетов в потоке данных, обнаружение событий. """ correlation = np.correlate(signal_data, pattern, mode='valid') threshold = 0.8 * np.max(np.abs(correlation)) peaks, _ = signal.find_peaks(correlation, height=threshold, distance=len(pattern)) return list(peaks) Pandas: анализ промышленных данныхimport pandas as pd import numpy as np from datetime import datetime, timedelta # ===== ЗАГРУЗКА И ОЧИСТКА ДАННЫХ ===== def load_plc_log(filepath: str) -> pd.DataFrame: """ Загрузка и нормализация лога ПЛК. Типичный формат: CSV с временной меткой и значениями тегов. """ df = pd.read_csv(filepath, parse_dates=['timestamp'], index_col='timestamp') # Нормализация имён колонок df.columns = df.columns.str.lower().str.replace(' ', '_').str.replace('.', '_') # Приведение типов numeric_cols = ['temperature', 'pressure', 'current', 'flow'] for col in numeric_cols: if col in df.columns: df[col] = pd.to_numeric(df[col], errors='coerce') bool_cols = ['running', 'fault', 'alarm'] for col in bool_cols: if col in df.columns: df[col] = df[col].astype(bool, errors='ignore') # Удаление дубликатов df = df[~df.index.duplicated(keep='first')] # Сортировка по времени df = df.sort_index() # Интерполяция пропущенных значений (не более 5 пропусков подряд) df[numeric_cols] = df[numeric_cols].interpolate( method='time', limit=5, limit_direction='forward' ) return df def analyze_production_data(df: pd.DataFrame) -> dict: """ Анализ производственных данных: KPI, простои, отклонения. """ results = {} # ===== ДОСТУПНОСТЬ ОБОРУДОВАНИЯ ===== if 'running' in df.columns: total_time = (df.index[-1] - df.index[0]).total_seconds() / 3600 # часы running_time = df['running'].mean() * total_time results['availability'] = { 'total_hours': round(total_time, 1), 'running_hours': round(running_time, 1), 'availability_pct': round(df['running'].mean() * 100, 1), } # ===== АНАЛИЗ ПРОСТОЕВ ===== if 'running' in df.columns: # Нахождение периодов простоя running_changes = df['running'].astype(int).diff() stop_times = df.index[running_changes == -1] # Моменты остановки start_times = df.index[running_changes == 1] # Моменты пуска downtimes = [] for stop in stop_times: # Найти следующий пуск после остановки next_start = start_times[start_times > stop] if len(next_start) > 0: duration = (next_start[0] - stop).total_seconds() / 60 # минуты downtimes.append({'stop': stop, 'start': next_start[0], 'duration_min': round(duration, 1)}) if downtimes: dt_df = pd.DataFrame(downtimes) results['downtimes'] = { 'count': len(dt_df), 'total_min': round(dt_df['duration_min'].sum(), 1), 'avg_min': round(dt_df['duration_min'].mean(), 1), 'max_min': round(dt_df['duration_min'].max(), 1), 'longest_stop': dt_df.loc[dt_df['duration_min'].idxmax(), 'stop'].isoformat(), } # ===== СТАТИСТИКА ПАРАМЕТРОВ ===== numeric_cols = df.select_dtypes(include=np.number).columns.tolist() if numeric_cols: stats = df[numeric_cols].describe() results['parameters'] = stats.to_dict() # ===== ОБНАРУЖЕНИЕ ВЫБРОСОВ (метод IQR) ===== outliers = {} for col in numeric_cols: Q1 = df[col].quantile(0.25) Q3 = df[col].quantile(0.75) IQR = Q3 - Q1 mask = (df[col] < Q1 - 1.5 * IQR) | (df[col] > Q3 + 1.5 * IQR) outlier_count = mask.sum() if outlier_count > 0: outliers[col] = { 'count': int(outlier_count), 'pct': round(outlier_count / len(df) * 100, 2), 'examples': df[mask][col].head(3).tolist(), } results['outliers'] = outliers return results # ===== ГЕНЕРАЦИЯ ОТЧЁТОВ ===== def generate_daily_report(df: pd.DataFrame, date: str = None) -> pd.DataFrame: """Сводная таблица по часам за день""" if date: df = df[df.index.date == pd.Timestamp(date).date()] # Агрегация по часам hourly = df.resample('1h').agg({ 'temperature': ['mean', 'min', 'max'], 'current': ['mean', 'max'], 'pressure': ['mean', 'min', 'max'], 'running': 'mean', # Доступность за час 'fault': 'any', # Были ли аварии }).round(2) # Плоские имена колонок hourly.columns = ['_'.join(col) for col in hourly.columns] hourly['availability_pct'] = (hourly['running_mean'] * 100).round(1) hourly['had_fault'] = hourly['fault_any'] return hourly # ===== EXCEL ОТЧЁТ ===== def export_to_excel(df: pd.DataFrame, hourly: pd.DataFrame, kpi: dict, filepath: str): """Красивый Excel-отчёт с несколькими листами""" with pd.ExcelWriter(filepath, engine='xlsxwriter') as writer: workbook = writer.book # Форматы header_fmt = workbook.add_format({ 'bold': True, 'bg_color': '#2C3E50', 'font_color': 'white', 'border': 1 }) number_fmt = workbook.add_format({'num_format': '0.0#', 'border': 1}) pct_fmt = workbook.add_format({'num_format': '0.0%', 'border': 1}) bad_fmt = workbook.add_format({'bg_color': '#FFB3B3', 'border': 1}) # ===== Лист 1: KPI ===== ws_kpi = workbook.add_worksheet('KPI') ws_kpi.write('A1', 'Показатель', header_fmt) ws_kpi.write('B1', 'Значение', header_fmt) avail = kpi.get('availability', {}) row = 1 for key, val in avail.items(): ws_kpi.write(row, 0, key) ws_kpi.write(row, 1, val) row += 1 ws_kpi.set_column('A:A', 25) ws_kpi.set_column('B:B', 15) # ===== Лист 2: Почасовой отчёт ===== hourly.to_excel(writer, sheet_name='Почасовой отчёт', startrow=1) ws = writer.sheets['Почасовой отчёт'] # Условное форматирование: красим аварийные часы ws.conditional_format('A2:Z1000', { 'type': 'formula', 'criteria': '=$G2=TRUE', # Если был fault 'format': bad_fmt }) # ===== Лист 3: Сырые данные (последние 1000 строк) ===== df.tail(1000).to_excel(writer, sheet_name='Данные') print(f"Отчёт сохранён: {filepath}") FastAPI: REST API для промышленных данных# pip install fastapi uvicorn from fastapi import FastAPI, HTTPException, Query from pydantic import BaseModel from typing import Optional from datetime import datetime import uvicorn app = FastAPI( title="Industrial Data API", description="API для доступа к данным производственного оборудования", version="1.0.0" ) # Модели данных class TelemetryPoint(BaseModel): device: str temperature: float current: float pressure: float running: bool timestamp: datetime class DeviceCommand(BaseModel): device: str command: str # "start", "stop", "set_setpoint" value: Optional[float] = None operator: str # Имитация БД (в реальности — запросы к InfluxDB/TimescaleDB) telemetry_db = [] @app.get("/api/v1/devices", summary="Список устройств") async def get_devices(): return { "devices": [ {"id": "pump1", "name": "Насос 1", "location": "Линия 1", "online": True}, {"id": "pump2", "name": "Насос 2", "location": "Линия 1", "online": True}, {"id": "valve1","name": "Клапан 1","location": "Линия 2","online": False}, ] } @app.get("/api/v1/telemetry/{device_id}", summary="Телеметрия устройства") async def get_telemetry( device_id: str, hours: int = Query(default=1, ge=1, le=720, description="Глубина истории"), resample: str = Query(default="1min", description="Гранулярность: 1s, 1min, 5min, 1h") ): # Проверка устройства valid_devices = ["pump1", "pump2", "valve1"] if device_id not in valid_devices: raise HTTPException(status_code=404, detail=f"Устройство '{device_id}' не найдено") # Запрос к historian (имитация) # В реальности: query_influxdb(device_id, hours, resample) return { "device": device_id, "from": (datetime.now().replace(hour=0, minute=0)).isoformat(), "to": datetime.now().isoformat(), "resample": resample, "points": [ {"time": datetime.now().isoformat(), "temperature": 85.3, "current": 15.2, "pressure": 5.8, "running": True} ] } @app.post("/api/v1/commands", summary="Отправить команду устройству", status_code=202) async def send_command(cmd: DeviceCommand): # Валидация команды valid_commands = ["start", "stop", "set_setpoint"] if cmd.command not in valid_commands: raise HTTPException(status_code=400, detail=f"Неизвестная команда: {cmd.command}") if cmd.command == "set_setpoint" and cmd.value is None: raise HTTPException(status_code=400, detail="set_setpoint требует параметр value") # Аудит-лог (обязательно для промышленных систем!) print(f"[AUDIT] {datetime.now()} | Operator: {cmd.operator} | " f"Device: {cmd.device} | Command: {cmd.command} | Value: {cmd.value}") # Отправить команду (через очередь, Modbus, OPC UA...) # command_queue.put(cmd) return {"status": "accepted", "command_id": "cmd_123456"} @app.get("/api/v1/health", summary="Healthcheck") async def health(): return {"status": "ok", "timestamp": datetime.now().isoformat()} # Запуск: uvicorn main:app --host 0.0.0.0 --port 8080 --reload asyncio: асинхронный опрос оборудованияimport asyncio import aiohttp import json from datetime import datetime async def poll_device_modbus(device_id: str, host: str, interval: float = 1.0): """Асинхронный опрос устройства через Modbus TCP""" from pymodbus.client import AsyncModbusTcpClient async with AsyncModbusTcpClient(host=host, port=502) as client: print(f"Подключён к {device_id} ({host})") while True: start = asyncio.get_event_loop().time() try: result = await client.read_input_registers(address=0, count=4, slave=1) if not result.isError(): data = { 'device': device_id, 'timestamp': datetime.now().isoformat(), 'temperature': result.registers[0] / 10.0, 'current': result.registers[1] / 10.0, 'pressure': result.registers[2] / 100.0, 'running': bool(result.registers[3] & 1), } # Публикуем данные (в очередь, БД, MQTT...) print(f"{device_id}: T={data['temperature']}°C") else: print(f"{device_id}: Ошибка Modbus") except Exception as e: print(f"{device_id}: {e}") await asyncio.sleep(5) # Пауза перед повтором continue # Точный интервал опроса elapsed = asyncio.get_event_loop().time() - start await asyncio.sleep(max(0, interval - elapsed)) async def main(): """Параллельный опрос нескольких устройств""" devices = [ ("pump1", "192.168.1.10"), ("pump2", "192.168.1.11"), ("valve1", "192.168.1.12"), ] # Запускаем все опросы параллельно tasks = [poll_device_modbus(dev_id, host, interval=1.0) for dev_id, host in devices] await asyncio.gather(*tasks) # Все работают одновременно! asyncio.run(main()) Полезные однострочники для инженераimport subprocess, json, struct, serial from pathlib import Path # Быстрый Modbus опрос из командной строки: # python -c "from pymodbus.client import ModbusTcpClient; c=ModbusTcpClient('192.168.1.10'); c.connect(); print(c.read_input_registers(0,4,slave=1).registers)" # Конвертация hex-дампа в float: def hex_to_float(hex_str: str) -> float: return struct.unpack('>f', bytes.fromhex(hex_str.replace(' ','')))[0] print(hex_to_float("42 48 00 00")) # → 50.0 # Поиск COM-портов: import serial.tools.list_ports for p in serial.tools.list_ports.comports(): print(f"{p.device}: {p.description}") # Быстрый парсинг CSV с временными метками: df = pd.read_csv('data.csv', parse_dates=['time'], index_col='time') print(df.resample('5min').mean()) # Сохранение данных в Parquet (быстрее CSV в 10-50 раз): df.to_parquet('data.parquet', compression='snappy') df2 = pd.read_parquet('data.parquet') ЗаключениеPython — это не замена C для микроконтроллеров и не замена SQL для баз данных. Это клей, который соединяет всё: читает данные из любого источника, анализирует, визуализирует, отправляет куда надо. Для инженера ключевые библиотеки: NumPy (быстрые вычисления), Pandas (анализ данных), SciPy (сигналы и системы), Matplotlib/Plotly (визуализация), pymodbus (Modbus), pyserial (UART), asyncua (OPC UA), FastAPI (REST API). Вложите неделю в изучение NumPy и Pandas — окупится сотнями часов сэкономленного времени на анализе данных, отчётах и автоматизации рутины.
Python — второй язык каждого инженераMatlab стоит дорого. LabVIEW — ещё дороже. Excel мощный, но у него есть потолок. Python — бесплатный, открытый, с огромной экосистемой библиотек для инженерных задач. И с каждым годом он глубже проникает в промышленность. Инженер-электронщик использует Python для: анализа данных с измерительных приборов, автоматизации рутинных расчётов, создания отчётов, обработки сигналов с АЦП, управления лабораторным оборудованием (VISA/PyVISA), прототипирования алгоритмов перед переносом на микроконтроллер. Специалист АСУ ТП — для: работы с Modbus/OPC UA, парсинга логов ПЛК, автоматического тестирования, интеграции различных систем. NumPy: числа быстроNumPy — фундамент научного Python. Массивы NumPy в 10–100 раз быстрее списков Python для математических операций. import numpy as np import time # ===== БАЗОВЫЕ ОПЕРАЦИИ ===== # Создание массивов t = np.linspace(0, 10, 1000) # 1000 точек от 0 до 10 f = np.arange(0, 50, 0.1) # От 0 до 50 с шагом 0.1 zeros = np.zeros((3, 4)) # Матрица 3×4 из нулей eye = np.eye(3) # Единичная матрица 3×3 # Синтетический сигнал (для теста) freq_signal = 50.0 # Гц freq_noise = 200.0 # Гц (помеха) sample_rate = 1000.0 # Гц t = np.arange(0, 1, 1/sample_rate) # 1 секунда данных signal_clean = 2.0 * np.sin(2 * np.pi * freq_signal * t) noise = 0.5 * np.sin(2 * np.pi * freq_noise * t) noise += 0.2 * np.random.randn(len(t)) # Белый шум signal_noisy = signal_clean + noise # ===== СКОРОСТЬ ===== def python_rms(data: list) -> float: return (sum(x**2 for x in data) / len(data)) ** 0.5 def numpy_rms(data: np.ndarray) -> float: return np.sqrt(np.mean(data**2)) # Сравнение скорости: data_list = list(signal_noisy) data_arr = np.array(data_list) t0 = time.time(); python_rms(data_list); t_py = time.time() - t0 t0 = time.time(); numpy_rms(data_arr); t_np = time.time() - t0 print(f"Python: {t_py*1000:.2f} мс, NumPy: {t_np*1000:.3f} мс, " f"Ускорение: {t_py/t_np:.0f}x") # ===== ИНЖЕНЕРНЫЕ РАСЧЁТЫ ===== def calculate_power_factor(voltage: np.ndarray, current: np.ndarray, sample_rate: float) -> dict: """ Расчёт коэффициента мощности из осциллограмм тока и напряжения. """ # RMS значения V_rms = np.sqrt(np.mean(voltage**2)) I_rms = np.sqrt(np.mean(current**2)) # Активная мощность (среднее произведение) P = np.mean(voltage * current) # Полная мощность S = V_rms * I_rms # Коэффициент мощности pf = P / S if S > 0 else 0 # Реактивная мощность Q = np.sqrt(max(0, S**2 - P**2)) return { 'V_rms': round(V_rms, 2), 'I_rms': round(I_rms, 3), 'P_kw': round(P / 1000, 2), 'Q_kvar': round(Q / 1000, 2), 'S_kva': round(S / 1000, 2), 'PF': round(abs(pf), 3), } # Пример использования: # Генерируем тестовые сигналы 220В 50Гц, ток 10А с φ=30° t = np.linspace(0, 0.04, 400) # 2 периода V = 220 * np.sqrt(2) * np.sin(2 * np.pi * 50 * t) I = 10 * np.sqrt(2) * np.sin(2 * np.pi * 50 * t - np.radians(30)) power = calculate_power_factor(V, I, 10000) print(f"P={power['P_kw']} кВт, Q={power['Q_kvar']} квар, cos(φ)={power['PF']}") # Ожидаем: cos(30°) ≈ 0.866 Scipy: анализ сигналовfrom scipy import signal, fft import numpy as np # ===== FFT: СПЕКТРАЛЬНЫЙ АНАЛИЗ ===== def analyze_spectrum(data: np.ndarray, sample_rate: float) -> dict: """ Анализ спектра сигнала через FFT. Используется для диагностики вибраций, качества электроэнергии. """ n = len(data) # Оконная функция (Hanning) для уменьшения спектральных утечек window = np.hanning(n) data_windowed = data * window # FFT spectrum = np.abs(fft.rfft(data_windowed)) freqs = fft.rfftfreq(n, 1.0/sample_rate) # Нормировка (учёт оконной функции) spectrum = spectrum / (n / 2) # THD (Total Harmonic Distortion) — для качества сетевого напряжения # Находим основную частоту (50 Гц) fundamental_idx = np.argmin(np.abs(freqs - 50.0)) fundamental_amp = spectrum[fundamental_idx] # Гармоники 2-я...7-я harmonic_power = sum( spectrum[np.argmin(np.abs(freqs - 50.0 * n))]**2 for n in range(2, 8) ) thd = np.sqrt(harmonic_power) / fundamental_amp * 100 # % # Топ-5 пиков спектра peak_indices = np.argsort(spectrum)[-10:][::-1] top_peaks = [(round(freqs[i], 1), round(spectrum[i], 4)) for i in peak_indices] return { 'freqs': freqs, 'spectrum': spectrum, 'thd_pct': round(thd, 2), 'top_peaks': top_peaks[:5], 'rms': round(np.sqrt(np.mean(data**2)), 4), } # ===== ФИЛЬТРАЦИЯ СИГНАЛОВ ===== def design_lowpass_filter(cutoff_hz: float, sample_rate: float, order: int = 4) -> tuple: """ Проектирование фильтра нижних частот Баттерворта. Используется для сглаживания зашумлённых данных датчиков. """ nyquist = sample_rate / 2 normalized_cutoff = cutoff_hz / nyquist b, a = signal.butter(order, normalized_cutoff, btype='low', analog=False) return b, a def apply_filter(data: np.ndarray, b: np.ndarray, a: np.ndarray, zero_phase: bool = True) -> np.ndarray: """ Применение фильтра к сигналу. zero_phase=True: filtfilt (нет фазового сдвига, требует данных полностью) zero_phase=False: lfilter (реального времени, есть фазовый сдвиг) """ if zero_phase: return signal.filtfilt(b, a, data) # Двупроходной (офлайн-обработка) else: return signal.lfilter(b, a, data) # Однопроходной (онлайн-обработка) # Пример: фильтрация зашумлённого датчика температуры sample_rate = 100.0 # 100 Гц t = np.arange(0, 10, 1/sample_rate) # Реальная температура (медленно меняется) true_temp = 75.0 + 5.0 * np.sin(2 * np.pi * 0.1 * t) # 0.1 Гц # С шумом (50Гц помеха от сети + белый шум) noisy_temp = true_temp + 2.0 * np.sin(2 * np.pi * 50 * t) + \ 0.5 * np.random.randn(len(t)) # Фильтр НЧ с частотой среза 1 Гц (убираем всё выше 1 Гц) b, a = design_lowpass_filter(cutoff_hz=1.0, sample_rate=sample_rate) filtered_temp = apply_filter(noisy_temp, b, a) print(f"Шум до фильтрации: {np.std(noisy_temp - true_temp):.3f}°C") print(f"Шум после фильтра: {np.std(filtered_temp - true_temp):.3f}°C") # ===== КОРРЕЛЯЦИЯ И ОБНАРУЖЕНИЕ СИГНАЛА ===== def find_pattern_in_signal(signal_data: np.ndarray, pattern: np.ndarray) -> list[int]: """ Поиск паттерна в сигнале через кросс-корреляцию. Применение: нахождение пакетов в потоке данных, обнаружение событий. """ correlation = np.correlate(signal_data, pattern, mode='valid') threshold = 0.8 * np.max(np.abs(correlation)) peaks, _ = signal.find_peaks(correlation, height=threshold, distance=len(pattern)) return list(peaks) Pandas: анализ промышленных данныхimport pandas as pd import numpy as np from datetime import datetime, timedelta # ===== ЗАГРУЗКА И ОЧИСТКА ДАННЫХ ===== def load_plc_log(filepath: str) -> pd.DataFrame: """ Загрузка и нормализация лога ПЛК. Типичный формат: CSV с временной меткой и значениями тегов. """ df = pd.read_csv(filepath, parse_dates=['timestamp'], index_col='timestamp') # Нормализация имён колонок df.columns = df.columns.str.lower().str.replace(' ', '_').str.replace('.', '_') # Приведение типов numeric_cols = ['temperature', 'pressure', 'current', 'flow'] for col in numeric_cols: if col in df.columns: df[col] = pd.to_numeric(df[col], errors='coerce') bool_cols = ['running', 'fault', 'alarm'] for col in bool_cols: if col in df.columns: df[col] = df[col].astype(bool, errors='ignore') # Удаление дубликатов df = df[~df.index.duplicated(keep='first')] # Сортировка по времени df = df.sort_index() # Интерполяция пропущенных значений (не более 5 пропусков подряд) df[numeric_cols] = df[numeric_cols].interpolate( method='time', limit=5, limit_direction='forward' ) return df def analyze_production_data(df: pd.DataFrame) -> dict: """ Анализ производственных данных: KPI, простои, отклонения. """ results = {} # ===== ДОСТУПНОСТЬ ОБОРУДОВАНИЯ ===== if 'running' in df.columns: total_time = (df.index[-1] - df.index[0]).total_seconds() / 3600 # часы running_time = df['running'].mean() * total_time results['availability'] = { 'total_hours': round(total_time, 1), 'running_hours': round(running_time, 1), 'availability_pct': round(df['running'].mean() * 100, 1), } # ===== АНАЛИЗ ПРОСТОЕВ ===== if 'running' in df.columns: # Нахождение периодов простоя running_changes = df['running'].astype(int).diff() stop_times = df.index[running_changes == -1] # Моменты остановки start_times = df.index[running_changes == 1] # Моменты пуска downtimes = [] for stop in stop_times: # Найти следующий пуск после остановки next_start = start_times[start_times > stop] if len(next_start) > 0: duration = (next_start[0] - stop).total_seconds() / 60 # минуты downtimes.append({'stop': stop, 'start': next_start[0], 'duration_min': round(duration, 1)}) if downtimes: dt_df = pd.DataFrame(downtimes) results['downtimes'] = { 'count': len(dt_df), 'total_min': round(dt_df['duration_min'].sum(), 1), 'avg_min': round(dt_df['duration_min'].mean(), 1), 'max_min': round(dt_df['duration_min'].max(), 1), 'longest_stop': dt_df.loc[dt_df['duration_min'].idxmax(), 'stop'].isoformat(), } # ===== СТАТИСТИКА ПАРАМЕТРОВ ===== numeric_cols = df.select_dtypes(include=np.number).columns.tolist() if numeric_cols: stats = df[numeric_cols].describe() results['parameters'] = stats.to_dict() # ===== ОБНАРУЖЕНИЕ ВЫБРОСОВ (метод IQR) ===== outliers = {} for col in numeric_cols: Q1 = df[col].quantile(0.25) Q3 = df[col].quantile(0.75) IQR = Q3 - Q1 mask = (df[col] < Q1 - 1.5 * IQR) | (df[col] > Q3 + 1.5 * IQR) outlier_count = mask.sum() if outlier_count > 0: outliers[col] = { 'count': int(outlier_count), 'pct': round(outlier_count / len(df) * 100, 2), 'examples': df[mask][col].head(3).tolist(), } results['outliers'] = outliers return results # ===== ГЕНЕРАЦИЯ ОТЧЁТОВ ===== def generate_daily_report(df: pd.DataFrame, date: str = None) -> pd.DataFrame: """Сводная таблица по часам за день""" if date: df = df[df.index.date == pd.Timestamp(date).date()] # Агрегация по часам hourly = df.resample('1h').agg({ 'temperature': ['mean', 'min', 'max'], 'current': ['mean', 'max'], 'pressure': ['mean', 'min', 'max'], 'running': 'mean', # Доступность за час 'fault': 'any', # Были ли аварии }).round(2) # Плоские имена колонок hourly.columns = ['_'.join(col) for col in hourly.columns] hourly['availability_pct'] = (hourly['running_mean'] * 100).round(1) hourly['had_fault'] = hourly['fault_any'] return hourly # ===== EXCEL ОТЧЁТ ===== def export_to_excel(df: pd.DataFrame, hourly: pd.DataFrame, kpi: dict, filepath: str): """Красивый Excel-отчёт с несколькими листами""" with pd.ExcelWriter(filepath, engine='xlsxwriter') as writer: workbook = writer.book # Форматы header_fmt = workbook.add_format({ 'bold': True, 'bg_color': '#2C3E50', 'font_color': 'white', 'border': 1 }) number_fmt = workbook.add_format({'num_format': '0.0#', 'border': 1}) pct_fmt = workbook.add_format({'num_format': '0.0%', 'border': 1}) bad_fmt = workbook.add_format({'bg_color': '#FFB3B3', 'border': 1}) # ===== Лист 1: KPI ===== ws_kpi = workbook.add_worksheet('KPI') ws_kpi.write('A1', 'Показатель', header_fmt) ws_kpi.write('B1', 'Значение', header_fmt) avail = kpi.get('availability', {}) row = 1 for key, val in avail.items(): ws_kpi.write(row, 0, key) ws_kpi.write(row, 1, val) row += 1 ws_kpi.set_column('A:A', 25) ws_kpi.set_column('B:B', 15) # ===== Лист 2: Почасовой отчёт ===== hourly.to_excel(writer, sheet_name='Почасовой отчёт', startrow=1) ws = writer.sheets['Почасовой отчёт'] # Условное форматирование: красим аварийные часы ws.conditional_format('A2:Z1000', { 'type': 'formula', 'criteria': '=$G2=TRUE', # Если был fault 'format': bad_fmt }) # ===== Лист 3: Сырые данные (последние 1000 строк) ===== df.tail(1000).to_excel(writer, sheet_name='Данные') print(f"Отчёт сохранён: {filepath}") FastAPI: REST API для промышленных данных# pip install fastapi uvicorn from fastapi import FastAPI, HTTPException, Query from pydantic import BaseModel from typing import Optional from datetime import datetime import uvicorn app = FastAPI( title="Industrial Data API", description="API для доступа к данным производственного оборудования", version="1.0.0" ) # Модели данных class TelemetryPoint(BaseModel): device: str temperature: float current: float pressure: float running: bool timestamp: datetime class DeviceCommand(BaseModel): device: str command: str # "start", "stop", "set_setpoint" value: Optional[float] = None operator: str # Имитация БД (в реальности — запросы к InfluxDB/TimescaleDB) telemetry_db = [] @app.get("/api/v1/devices", summary="Список устройств") async def get_devices(): return { "devices": [ {"id": "pump1", "name": "Насос 1", "location": "Линия 1", "online": True}, {"id": "pump2", "name": "Насос 2", "location": "Линия 1", "online": True}, {"id": "valve1","name": "Клапан 1","location": "Линия 2","online": False}, ] } @app.get("/api/v1/telemetry/{device_id}", summary="Телеметрия устройства") async def get_telemetry( device_id: str, hours: int = Query(default=1, ge=1, le=720, description="Глубина истории"), resample: str = Query(default="1min", description="Гранулярность: 1s, 1min, 5min, 1h") ): # Проверка устройства valid_devices = ["pump1", "pump2", "valve1"] if device_id not in valid_devices: raise HTTPException(status_code=404, detail=f"Устройство '{device_id}' не найдено") # Запрос к historian (имитация) # В реальности: query_influxdb(device_id, hours, resample) return { "device": device_id, "from": (datetime.now().replace(hour=0, minute=0)).isoformat(), "to": datetime.now().isoformat(), "resample": resample, "points": [ {"time": datetime.now().isoformat(), "temperature": 85.3, "current": 15.2, "pressure": 5.8, "running": True} ] } @app.post("/api/v1/commands", summary="Отправить команду устройству", status_code=202) async def send_command(cmd: DeviceCommand): # Валидация команды valid_commands = ["start", "stop", "set_setpoint"] if cmd.command not in valid_commands: raise HTTPException(status_code=400, detail=f"Неизвестная команда: {cmd.command}") if cmd.command == "set_setpoint" and cmd.value is None: raise HTTPException(status_code=400, detail="set_setpoint требует параметр value") # Аудит-лог (обязательно для промышленных систем!) print(f"[AUDIT] {datetime.now()} | Operator: {cmd.operator} | " f"Device: {cmd.device} | Command: {cmd.command} | Value: {cmd.value}") # Отправить команду (через очередь, Modbus, OPC UA...) # command_queue.put(cmd) return {"status": "accepted", "command_id": "cmd_123456"} @app.get("/api/v1/health", summary="Healthcheck") async def health(): return {"status": "ok", "timestamp": datetime.now().isoformat()} # Запуск: uvicorn main:app --host 0.0.0.0 --port 8080 --reload asyncio: асинхронный опрос оборудованияimport asyncio import aiohttp import json from datetime import datetime async def poll_device_modbus(device_id: str, host: str, interval: float = 1.0): """Асинхронный опрос устройства через Modbus TCP""" from pymodbus.client import AsyncModbusTcpClient async with AsyncModbusTcpClient(host=host, port=502) as client: print(f"Подключён к {device_id} ({host})") while True: start = asyncio.get_event_loop().time() try: result = await client.read_input_registers(address=0, count=4, slave=1) if not result.isError(): data = { 'device': device_id, 'timestamp': datetime.now().isoformat(), 'temperature': result.registers[0] / 10.0, 'current': result.registers[1] / 10.0, 'pressure': result.registers[2] / 100.0, 'running': bool(result.registers[3] & 1), } # Публикуем данные (в очередь, БД, MQTT...) print(f"{device_id}: T={data['temperature']}°C") else: print(f"{device_id}: Ошибка Modbus") except Exception as e: print(f"{device_id}: {e}") await asyncio.sleep(5) # Пауза перед повтором continue # Точный интервал опроса elapsed = asyncio.get_event_loop().time() - start await asyncio.sleep(max(0, interval - elapsed)) async def main(): """Параллельный опрос нескольких устройств""" devices = [ ("pump1", "192.168.1.10"), ("pump2", "192.168.1.11"), ("valve1", "192.168.1.12"), ] # Запускаем все опросы параллельно tasks = [poll_device_modbus(dev_id, host, interval=1.0) for dev_id, host in devices] await asyncio.gather(*tasks) # Все работают одновременно! asyncio.run(main()) Полезные однострочники для инженераimport subprocess, json, struct, serial from pathlib import Path # Быстрый Modbus опрос из командной строки: # python -c "from pymodbus.client import ModbusTcpClient; c=ModbusTcpClient('192.168.1.10'); c.connect(); print(c.read_input_registers(0,4,slave=1).registers)" # Конвертация hex-дампа в float: def hex_to_float(hex_str: str) -> float: return struct.unpack('>f', bytes.fromhex(hex_str.replace(' ','')))[0] print(hex_to_float("42 48 00 00")) # → 50.0 # Поиск COM-портов: import serial.tools.list_ports for p in serial.tools.list_ports.comports(): print(f"{p.device}: {p.description}") # Быстрый парсинг CSV с временными метками: df = pd.read_csv('data.csv', parse_dates=['time'], index_col='time') print(df.resample('5min').mean()) # Сохранение данных в Parquet (быстрее CSV в 10-50 раз): df.to_parquet('data.parquet', compression='snappy') df2 = pd.read_parquet('data.parquet') ЗаключениеPython — это не замена C для микроконтроллеров и не замена SQL для баз данных. Это клей, который соединяет всё: читает данные из любого источника, анализирует, визуализирует, отправляет куда надо. Для инженера ключевые библиотеки: NumPy (быстрые вычисления), Pandas (анализ данных), SciPy (сигналы и системы), Matplotlib/Plotly (визуализация), pymodbus (Modbus), pyserial (UART), asyncua (OPC UA), FastAPI (REST API). Вложите неделю в изучение NumPy и Pandas — окупится сотнями часов сэкономленного времени на анализе данных, отчётах и автоматизации рутины. -
 Зачем RTOS на микроконтроллереПростой проект — один while(1) цикл. Всё хорошо: считали датчик, обновили дисплей, проверили кнопку. Но что если: Нужно принять UART-пакет точно за 10 мс, иначе потеряем байты Одновременно управлять тремя независимыми ПИД-контурами Обрабатывать CAN-сообщения с задержкой не более 5 мс И параллельно вести логирование на SD-карту Суперцикл (while(1)) ломается: длинная операция блокирует всё остальное. Прерывания помогают, но сложная логика в прерываниях — путь к хаосу. FreeRTOS решает это элегантно: каждая задача — отдельный "поток" со своим стеком и приоритетом. Планировщик переключает их так быстро (обычно каждые 1 мс), что кажется будто они работают одновременно. Задача с высоким приоритетом всегда получает процессор раньше. Ключевые концепции FreeRTOSTask (Задача)// Прототип задачи — бесконечный цикл! void vTaskFunction(void *pvParameters) { // Инициализация задачи int *param = (int *)pvParameters; for (;;) // Никогда не выходит! { // Работа задачи... // Уступить процессор (обязательно в каждом цикле!) vTaskDelay(pdMS_TO_TICKS(100)); // Пауза 100 мс } vTaskDelete(NULL); // Никогда не достигается, но хорошая практика } // Создание задачи: TaskHandle_t xTaskHandle = NULL; xTaskCreate( vTaskFunction, // Функция задачи "TaskName", // Имя (для отладки) configMINIMAL_STACK_SIZE * 4, // Размер стека в словах NULL, // Параметр (pvParameters) tskIDLE_PRIORITY + 2, // Приоритет (выше = важнее) &xTaskHandle // Хендл задачи ); ПриоритетыconfigMAX_PRIORITIES = 7 (типично) Приоритет 6: КРИТИЧЕСКИЙ (ISR-уровень, прерывания) Приоритет 5: Коммуникации реального времени (CAN, UART) Приоритет 4: Управление (ПИД-контроллеры) Приоритет 3: Мониторинг, аварийная логика Приоритет 2: UI, дисплей, кнопки Приоритет 1: Логирование, некритичные задачи Приоритет 0: Idle task (только когда все остальные ждут) Архитектура многозадачного приложенияРеальный пример: контроллер насосной станции на STM32F4. // ===== ЗАГОЛОВКИ ===== #include "FreeRTOS.h" #include "task.h" #include "queue.h" #include "semphr.h" #include "timers.h" // ===== ГЛОБАЛЬНЫЕ ОБЪЕКТЫ FreeRTOS ===== QueueHandle_t xSensorQueue; // Данные датчиков QueueHandle_t xCommandQueue; // Команды управления QueueHandle_t xLogQueue; // Сообщения лога SemaphoreHandle_t xI2CMutex; // Защита I2C шины SemaphoreHandle_t xUARTMutex; // Защита UART (printf) TimerHandle_t xHeartbeatTimer; // Мигание LED watchdog // ===== СТРУКТУРЫ ДАННЫХ ===== typedef struct { float temperature; float pressure; float flow; uint32_t timestamp_ms; uint8_t quality; // 0=BAD, 1=UNCERTAIN, 2=GOOD } SensorData_t; typedef enum { CMD_START, CMD_STOP, CMD_SET_SETPOINT, CMD_RESET_FAULT, } CommandType_t; typedef struct { CommandType_t type; float value; uint8_t source; // 0=HMI, 1=Modbus, 2=Auto } Command_t; typedef struct { char message[80]; uint8_t level; // 0=DEBUG, 1=INFO, 2=WARN, 3=ERROR uint32_t timestamp_ms; } LogMessage_t; // ===== ВСПОМОГАТЕЛЬНЫЙ МАКРОС ДЛЯ PRINTF ===== // Потокобезопасный printf через мьютекс #define LOG(level, fmt, ...) do { \ LogMessage_t msg; \ msg.level = (level); \ msg.timestamp_ms = xTaskGetTickCount(); \ snprintf(msg.message, sizeof(msg.message), fmt, ##__VA_ARGS__); \ xQueueSend(xLogQueue, &msg, 0); \ } while(0) #define LOG_INFO(fmt,...) LOG(1, fmt, ##__VA_ARGS__) #define LOG_WARN(fmt,...) LOG(2, "[WARN] " fmt, ##__VA_ARGS__) #define LOG_ERROR(fmt,...) LOG(3, "[ERR!] " fmt, ##__VA_ARGS__) // ===== ЗАДАЧА 1: ЧТЕНИЕ ДАТЧИКОВ (Приоритет 4) ===== static void vSensorTask(void *pvParam) { SensorData_t data; TickType_t xLastWakeTime = xTaskGetTickCount(); const TickType_t xPeriod = pdMS_TO_TICKS(100); // 10 Гц LOG_INFO("Sensor task started"); for (;;) { // Ждём ровно 100 мс от последнего пробуждения // vTaskDelayUntil гарантирует точный период! vTaskDelayUntil(&xLastWakeTime, xPeriod); data.timestamp_ms = xTaskGetTickCount(); // Захватываем I2C шину if (xSemaphoreTake(xI2CMutex, pdMS_TO_TICKS(50)) == pdTRUE) { data.temperature = BMP280_ReadTemperature(); data.pressure = BMP280_ReadPressure(); data.quality = 2; // GOOD xSemaphoreGive(xI2CMutex); } else { // I2C занята дольше 50 мс — что-то пошло не так data.quality = 0; // BAD LOG_WARN("I2C timeout in sensor task"); } // Читаем расходомер через 4-20мА data.flow = ADC_ReadFlow(); // Отправляем данные в очередь (не блокируем — если полная, пропускаем) if (xQueueSend(xSensorQueue, &data, 0) != pdTRUE) { LOG_WARN("Sensor queue full!"); } } } // ===== ЗАДАЧА 2: ПИД-УПРАВЛЕНИЕ (Приоритет 5) ===== static void vControlTask(void *pvParam) { SensorData_t sensorData; Command_t command; float setpoint = 5.0f; // Уставка давления, бар float output = 0.0f; bool running = false; bool fault = false; // ПИД параметры float kp = 2.0f, ki = 0.5f, kd = 0.1f; float integral = 0.0f, prevError = 0.0f; const float TS = 0.1f; // Совпадает с периодом датчиков LOG_INFO("Control task started"); for (;;) { // Ждём новые данные датчиков (блокирующий ждём до 200 мс) if (xQueueReceive(xSensorQueue, &sensorData, pdMS_TO_TICKS(200)) == pdTRUE) { // Проверяем входящие команды (неблокирующий) while (xQueueReceive(xCommandQueue, &command, 0) == pdTRUE) { switch (command.type) { case CMD_START: running = true; fault = false; integral = 0; LOG_INFO("Pump STARTED by source %d", command.source); break; case CMD_STOP: running = false; output = 0; LOG_INFO("Pump STOPPED by source %d", command.source); break; case CMD_SET_SETPOINT: setpoint = command.value; LOG_INFO("Setpoint changed to %.1f bar", setpoint); break; case CMD_RESET_FAULT: fault = false; LOG_INFO("Fault reset"); break; } } // Защиты if (sensorData.quality == 0) { running = false; fault = true; output = 0; LOG_ERROR("Sensor fault! Emergency stop."); } if (sensorData.pressure > 12.0f) { running = false; fault = true; output = 0; LOG_ERROR("High pressure! %.2f bar > 12.0 bar", sensorData.pressure); } if (sensorData.temperature > 90.0f) { running = false; fault = true; output = 0; LOG_ERROR("Motor overtemp! %.1f°C > 90°C", sensorData.temperature); } // ПИД вычисление if (running && !fault) { float error = setpoint - sensorData.pressure; integral += ki * error * TS; integral = fmaxf(-50.0f, fminf(50.0f, integral)); // Anti-windup float derivative = -(sensorData.pressure - prevError) / TS; prevError = sensorData.pressure; output = kp * error + integral + kd * derivative; output = fmaxf(0.0f, fminf(100.0f, output)); } else { output = 0.0f; integral = 0.0f; } // Применяем управляющий сигнал VFD_SetFrequency(output * 0.5f); // 0-100% → 0-50 Гц } else { // Таймаут ожидания данных датчика — авария LOG_ERROR("Sensor data timeout!"); running = false; output = 0; VFD_SetFrequency(0); } } } // ===== ЗАДАЧА 3: MODBUS SLAVE (Приоритет 3) ===== static void vModbusTask(void *pvParam) { uint8_t rxBuf[64]; uint8_t rxLen = 0; LOG_INFO("Modbus task started"); for (;;) { // Ждём байт из UART (через семафор от прерывания) if (UART_WaitForData(rxBuf, &rxLen, pdMS_TO_TICKS(100))) { // Обрабатываем Modbus запрос if (Modbus_ProcessRequest(rxBuf, rxLen)) { // Если команда — отправляем в очередь управления Command_t cmd; if (Modbus_ExtractCommand(&cmd)) { xQueueSend(xCommandQueue, &cmd, pdMS_TO_TICKS(10)); } } } } } // ===== ЗАДАЧА 4: ЛОГИРОВАНИЕ (Приоритет 1, самый низкий) ===== static void vLoggingTask(void *pvParam) { LogMessage_t msg; const char *levelNames[] = {"DBG", "INF", "WRN", "ERR"}; for (;;) { // Ждём сообщение из очереди if (xQueueReceive(xLogQueue, &msg, portMAX_DELAY) == pdTRUE) { // Пишем в UART (захватываем мьютекс) if (xSemaphoreTake(xUARTMutex, pdMS_TO_TICKS(50)) == pdTRUE) { printf("[%6lu][%s] %s\r\n", (unsigned long)msg.timestamp_ms, levelNames[msg.level % 4], msg.message); xSemaphoreGive(xUARTMutex); } // Пишем на SD-карту (низкий приоритет = не мешаем критичным задачам) // SD_AppendLog(&msg); } } } // ===== ТАЙМЕР HEARTBEAT ===== static void vHeartbeatCallback(TimerHandle_t xTimer) { // Мигаем светодиодом — система жива HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); } // ===== ИНИЦИАЛИЗАЦИЯ ===== void App_Init(void) { // Создаём очереди xSensorQueue = xQueueCreate(5, sizeof(SensorData_t)); xCommandQueue = xQueueCreate(10, sizeof(Command_t)); xLogQueue = xQueueCreate(20, sizeof(LogMessage_t)); // Создаём мьютексы xI2CMutex = xSemaphoreCreateMutex(); xUARTMutex = xSemaphoreCreateMutex(); // Создаём задачи xTaskCreate(vSensorTask, "Sensors", 512, NULL, 4, NULL); xTaskCreate(vControlTask, "Control", 1024, NULL, 5, NULL); xTaskCreate(vModbusTask, "Modbus", 512, NULL, 3, NULL); xTaskCreate(vLoggingTask, "Logging", 256, NULL, 1, NULL); // Создаём таймер heartbeat (500 мс) xHeartbeatTimer = xTimerCreate("Heartbeat", pdMS_TO_TICKS(500), pdTRUE, NULL, vHeartbeatCallback); xTimerStart(xHeartbeatTimer, 0); // Запуск планировщика vTaskStartScheduler(); // Никогда не должно дойти сюда! for (;;); } Очереди: безопасная передача данных между задачамиОчередь — это основной механизм коммуникации в FreeRTOS. Thread-safe, FIFO, блокирующий. // Создание очереди на 10 элементов типа uint32_t QueueHandle_t xQueue = xQueueCreate(10, sizeof(uint32_t)); // Отправка (из задачи) uint32_t value = 42; xQueueSend(xQueue, &value, pdMS_TO_TICKS(100)); // Ждём 100мс если полная // Отправка с высоким приоритетом (в начало очереди) xQueueSendToFront(xQueue, &value, 0); // Отправка из прерывания (другая функция!) BaseType_t xHigherPriorityTaskWoken = pdFALSE; xQueueSendFromISR(xQueue, &value, &xHigherPriorityTaskWoken); portYIELD_FROM_ISR(xHigherPriorityTaskWoken); // Уступить если нужно // Приём (блокирует до данных или таймаута) uint32_t received; if (xQueueReceive(xQueue, &received, portMAX_DELAY) == pdTRUE) { // Данные получены } // "Подсмотреть" без извлечения xQueuePeek(xQueue, &received, 0); // Мониторинг UBaseType_t count = uxQueueMessagesWaiting(xQueue); // Сколько элементов UBaseType_t space = uxQueueSpacesAvailable(xQueue); // Сколько свободно Семафоры и мьютексы: защита разделяемых ресурсов// ===== МЬЮТЕКС (Mutual Exclusion) ===== // Для защиты ресурсов (I2C, SPI, UART, глобальные переменные) SemaphoreHandle_t xMutex = xSemaphoreCreateMutex(); // Правильный паттерн: void safe_i2c_read(uint8_t addr, uint8_t reg, uint8_t *buf, uint8_t len) { if (xSemaphoreTake(xMutex, pdMS_TO_TICKS(100)) == pdTRUE) { HAL_I2C_Mem_Read(&hi2c1, addr, reg, 1, buf, len, 100); xSemaphoreGive(xMutex); } else { // Таймаут — логируем, возвращаем ошибку } } // ===== ДВОИЧНЫЙ СЕМАФОР (уведомление о событии) ===== // Задача ждёт событие от ISR SemaphoreHandle_t xDataReadySemaphore = xSemaphoreCreateBinary(); // В прерывании (данные готовы): void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { BaseType_t xWoken = pdFALSE; xSemaphoreGiveFromISR(xDataReadySemaphore, &xWoken); portYIELD_FROM_ISR(xWoken); } // В задаче (ждём данные): void vProcessingTask(void *pvParam) { for (;;) { // Эффективное ожидание — задача не потребляет CPU! xSemaphoreTake(xDataReadySemaphore, portMAX_DELAY); // Данные готовы — обрабатываем process_uart_data(); } } // ===== СЧЁТНЫЙ СЕМАФОР (ограничение конкурентного доступа) ===== // Пример: максимум 3 одновременных подключения SemaphoreHandle_t xConnectionSlots = xSemaphoreCreateCounting(3, 3); void handle_new_connection() { if (xSemaphoreTake(xConnectionSlots, pdMS_TO_TICKS(5000)) == pdTRUE) { // Слот получен serve_client(); xSemaphoreGive(xConnectionSlots); // Освободить слот } else { // Нет свободных слотов send_busy_response(); } } Программные таймеры// Таймер однократный (one-shot) vs периодический TimerHandle_t xOneShotTimer; TimerHandle_t xPeriodicTimer; void vTimerCallback(TimerHandle_t xTimer) { // pvTimerGetTimerID позволяет использовать один callback для многих таймеров uint32_t timerID = (uint32_t)pvTimerGetTimerID(xTimer); switch (timerID) { case 1: // Однократный таймер — отключить нагреватель через 30 сек Heater_Off(); break; case 2: // Периодический — опрос watchdog External_WDT_Kick(); break; } } void setup_timers(void) { // One-shot таймер (не перезапускается автоматически) xOneShotTimer = xTimerCreate( "Heater", pdMS_TO_TICKS(30000), // 30 секунд pdFALSE, // pdFALSE = one-shot (void *)1, // ID таймера vTimerCallback ); // Периодический таймер xPeriodicTimer = xTimerCreate( "WDT", pdMS_TO_TICKS(500), // 500 мс pdTRUE, // pdTRUE = периодический (void *)2, vTimerCallback ); xTimerStart(xPeriodicTimer, 0); // Запустить один-шот когда нужно: // xTimerStart(xOneShotTimer, 0); // Сбросить периодический (перезапустить отсчёт): // xTimerReset(xPeriodicTimer, 0); // Изменить период на лету: // xTimerChangePeriod(xPeriodicTimer, pdMS_TO_TICKS(1000), 0); } Управление памятью и отладка// Мониторинг стека задачи (важно для нахождения переполнений!) void vCheckStackTask(void *pvParam) { for (;;) { vTaskDelay(pdMS_TO_TICKS(5000)); // Минимальный остаток стека (в словах) с начала работы UBaseType_t hwm = uxTaskGetStackHighWaterMark(NULL); if (hwm < 50) { // Меньше 50 слов — опасно! printf("WARNING: Task '%s' stack low! HWM=%lu words\r\n", pcTaskGetName(NULL), (unsigned long)hwm); } } } // Вывод информации о всех задачах (для отладки) void vPrintTaskStats(void) { char buffer[512]; vTaskList(buffer); // Требует configUSE_TRACE_FACILITY=1 printf("Task Name\t\tState\tPrio\tStack\tNum\r\n%s", buffer); // Загрузка CPU по задачам (требует configGENERATE_RUN_TIME_STATS=1) vTaskGetRunTimeStats(buffer); printf("\r\nTask\t\t\tTime\t\t%%\r\n%s", buffer); } // Обработчик нехватки памяти void vApplicationMallocFailedHook(void) { taskDISABLE_INTERRUPTS(); printf("FATAL: malloc failed! Heap exhausted.\r\n"); for (;;); } // Переполнение стека задачи void vApplicationStackOverflowHook(TaskHandle_t xTask, char *pcTaskName) { taskDISABLE_INTERRUPTS(); printf("FATAL: Stack overflow in task '%s'!\r\n", pcTaskName); for (;;); } FreeRTOS на ESP32ESP-IDF (официальный SDK ESP32) использует FreeRTOS как основу. На двухядерном ESP32 задачи можно привязывать к конкретному ядру: // ESP32-специфичное создание задачи с указанием ядра xTaskCreatePinnedToCore( vWiFiTask, // Функция "WiFi", // Имя 8192, // Стек (в байтах для ESP32!) NULL, // Параметры 5, // Приоритет &xWiFiHandle, // Хендл 0 // Ядро: 0 = Protocol CPU, 1 = Application CPU ); // WiFi и Bluetooth — всегда на ядре 0 (Protocol CPU) // Ваш код — лучше на ядре 1 (Application CPU) // Это разделяет сетевой стек и бизнес-логику // Встроенный мониторинг задач ESP-IDF: void print_esp_task_info(void) { printf("Free heap: %u bytes\r\n", esp_get_free_heap_size()); printf("Min free heap: %u bytes\r\n", esp_get_minimum_free_heap_size()); } Типичные ошибки FreeRTOS1. Вызов обычных функций из ISR // НЕПРАВИЛЬНО — заблокирует прерывание! void HAL_GPIO_EXTI_Callback(uint16_t pin) { xQueueSend(xQueue, &data, portMAX_DELAY); // ОШИБКА: блокирует ISR! } // ПРАВИЛЬНО — FromISR версии функций: void HAL_GPIO_EXTI_Callback(uint16_t pin) { BaseType_t xWoken = pdFALSE; xQueueSendFromISR(xQueue, &data, &xWoken); portYIELD_FROM_ISR(xWoken); } 2. Бесконечная задача без yield // НЕПРАВИЛЬНО — монополизирует процессор! void vBadTask(void *p) { for (;;) { do_something(); // Нет vTaskDelay или блокирующего ожидания! } } // ПРАВИЛЬНО: void vGoodTask(void *p) { for (;;) { do_something(); vTaskDelay(pdMS_TO_TICKS(10)); // Уступаем хотя бы 10 мс } } 3. Доступ к глобальным данным без защиты // НЕПРАВИЛЬНО — race condition! float g_temperature = 0; void vSensor(void *p) { g_temperature = read_sensor(); } void vControl(void *p) { if (g_temperature > 80) alarm(); } // ПРАВИЛЬНО — через очередь или мьютекс ЗаключениеFreeRTOS превращает микроконтроллер из последовательного автомата в полноценную многозадачную систему. Это не усложнение ради усложнения — это решение реальных проблем: независимость задач, чёткие интерфейсы через очереди, защита ресурсов через мьютексы. Начните с малого: замените суперцикл двумя задачами — одна читает датчик, другая управляет выходом, общаются через очередь. Это уже даст почувствовать преимущества. FreeRTOS поддерживается на STM32, ESP32, Arduino (с ограничениями), Raspberry Pi Pico и десятках других платформ. Документация на freertos.org — отличная, с примерами и объяснениями.
Зачем RTOS на микроконтроллереПростой проект — один while(1) цикл. Всё хорошо: считали датчик, обновили дисплей, проверили кнопку. Но что если: Нужно принять UART-пакет точно за 10 мс, иначе потеряем байты Одновременно управлять тремя независимыми ПИД-контурами Обрабатывать CAN-сообщения с задержкой не более 5 мс И параллельно вести логирование на SD-карту Суперцикл (while(1)) ломается: длинная операция блокирует всё остальное. Прерывания помогают, но сложная логика в прерываниях — путь к хаосу. FreeRTOS решает это элегантно: каждая задача — отдельный "поток" со своим стеком и приоритетом. Планировщик переключает их так быстро (обычно каждые 1 мс), что кажется будто они работают одновременно. Задача с высоким приоритетом всегда получает процессор раньше. Ключевые концепции FreeRTOSTask (Задача)// Прототип задачи — бесконечный цикл! void vTaskFunction(void *pvParameters) { // Инициализация задачи int *param = (int *)pvParameters; for (;;) // Никогда не выходит! { // Работа задачи... // Уступить процессор (обязательно в каждом цикле!) vTaskDelay(pdMS_TO_TICKS(100)); // Пауза 100 мс } vTaskDelete(NULL); // Никогда не достигается, но хорошая практика } // Создание задачи: TaskHandle_t xTaskHandle = NULL; xTaskCreate( vTaskFunction, // Функция задачи "TaskName", // Имя (для отладки) configMINIMAL_STACK_SIZE * 4, // Размер стека в словах NULL, // Параметр (pvParameters) tskIDLE_PRIORITY + 2, // Приоритет (выше = важнее) &xTaskHandle // Хендл задачи ); ПриоритетыconfigMAX_PRIORITIES = 7 (типично) Приоритет 6: КРИТИЧЕСКИЙ (ISR-уровень, прерывания) Приоритет 5: Коммуникации реального времени (CAN, UART) Приоритет 4: Управление (ПИД-контроллеры) Приоритет 3: Мониторинг, аварийная логика Приоритет 2: UI, дисплей, кнопки Приоритет 1: Логирование, некритичные задачи Приоритет 0: Idle task (только когда все остальные ждут) Архитектура многозадачного приложенияРеальный пример: контроллер насосной станции на STM32F4. // ===== ЗАГОЛОВКИ ===== #include "FreeRTOS.h" #include "task.h" #include "queue.h" #include "semphr.h" #include "timers.h" // ===== ГЛОБАЛЬНЫЕ ОБЪЕКТЫ FreeRTOS ===== QueueHandle_t xSensorQueue; // Данные датчиков QueueHandle_t xCommandQueue; // Команды управления QueueHandle_t xLogQueue; // Сообщения лога SemaphoreHandle_t xI2CMutex; // Защита I2C шины SemaphoreHandle_t xUARTMutex; // Защита UART (printf) TimerHandle_t xHeartbeatTimer; // Мигание LED watchdog // ===== СТРУКТУРЫ ДАННЫХ ===== typedef struct { float temperature; float pressure; float flow; uint32_t timestamp_ms; uint8_t quality; // 0=BAD, 1=UNCERTAIN, 2=GOOD } SensorData_t; typedef enum { CMD_START, CMD_STOP, CMD_SET_SETPOINT, CMD_RESET_FAULT, } CommandType_t; typedef struct { CommandType_t type; float value; uint8_t source; // 0=HMI, 1=Modbus, 2=Auto } Command_t; typedef struct { char message[80]; uint8_t level; // 0=DEBUG, 1=INFO, 2=WARN, 3=ERROR uint32_t timestamp_ms; } LogMessage_t; // ===== ВСПОМОГАТЕЛЬНЫЙ МАКРОС ДЛЯ PRINTF ===== // Потокобезопасный printf через мьютекс #define LOG(level, fmt, ...) do { \ LogMessage_t msg; \ msg.level = (level); \ msg.timestamp_ms = xTaskGetTickCount(); \ snprintf(msg.message, sizeof(msg.message), fmt, ##__VA_ARGS__); \ xQueueSend(xLogQueue, &msg, 0); \ } while(0) #define LOG_INFO(fmt,...) LOG(1, fmt, ##__VA_ARGS__) #define LOG_WARN(fmt,...) LOG(2, "[WARN] " fmt, ##__VA_ARGS__) #define LOG_ERROR(fmt,...) LOG(3, "[ERR!] " fmt, ##__VA_ARGS__) // ===== ЗАДАЧА 1: ЧТЕНИЕ ДАТЧИКОВ (Приоритет 4) ===== static void vSensorTask(void *pvParam) { SensorData_t data; TickType_t xLastWakeTime = xTaskGetTickCount(); const TickType_t xPeriod = pdMS_TO_TICKS(100); // 10 Гц LOG_INFO("Sensor task started"); for (;;) { // Ждём ровно 100 мс от последнего пробуждения // vTaskDelayUntil гарантирует точный период! vTaskDelayUntil(&xLastWakeTime, xPeriod); data.timestamp_ms = xTaskGetTickCount(); // Захватываем I2C шину if (xSemaphoreTake(xI2CMutex, pdMS_TO_TICKS(50)) == pdTRUE) { data.temperature = BMP280_ReadTemperature(); data.pressure = BMP280_ReadPressure(); data.quality = 2; // GOOD xSemaphoreGive(xI2CMutex); } else { // I2C занята дольше 50 мс — что-то пошло не так data.quality = 0; // BAD LOG_WARN("I2C timeout in sensor task"); } // Читаем расходомер через 4-20мА data.flow = ADC_ReadFlow(); // Отправляем данные в очередь (не блокируем — если полная, пропускаем) if (xQueueSend(xSensorQueue, &data, 0) != pdTRUE) { LOG_WARN("Sensor queue full!"); } } } // ===== ЗАДАЧА 2: ПИД-УПРАВЛЕНИЕ (Приоритет 5) ===== static void vControlTask(void *pvParam) { SensorData_t sensorData; Command_t command; float setpoint = 5.0f; // Уставка давления, бар float output = 0.0f; bool running = false; bool fault = false; // ПИД параметры float kp = 2.0f, ki = 0.5f, kd = 0.1f; float integral = 0.0f, prevError = 0.0f; const float TS = 0.1f; // Совпадает с периодом датчиков LOG_INFO("Control task started"); for (;;) { // Ждём новые данные датчиков (блокирующий ждём до 200 мс) if (xQueueReceive(xSensorQueue, &sensorData, pdMS_TO_TICKS(200)) == pdTRUE) { // Проверяем входящие команды (неблокирующий) while (xQueueReceive(xCommandQueue, &command, 0) == pdTRUE) { switch (command.type) { case CMD_START: running = true; fault = false; integral = 0; LOG_INFO("Pump STARTED by source %d", command.source); break; case CMD_STOP: running = false; output = 0; LOG_INFO("Pump STOPPED by source %d", command.source); break; case CMD_SET_SETPOINT: setpoint = command.value; LOG_INFO("Setpoint changed to %.1f bar", setpoint); break; case CMD_RESET_FAULT: fault = false; LOG_INFO("Fault reset"); break; } } // Защиты if (sensorData.quality == 0) { running = false; fault = true; output = 0; LOG_ERROR("Sensor fault! Emergency stop."); } if (sensorData.pressure > 12.0f) { running = false; fault = true; output = 0; LOG_ERROR("High pressure! %.2f bar > 12.0 bar", sensorData.pressure); } if (sensorData.temperature > 90.0f) { running = false; fault = true; output = 0; LOG_ERROR("Motor overtemp! %.1f°C > 90°C", sensorData.temperature); } // ПИД вычисление if (running && !fault) { float error = setpoint - sensorData.pressure; integral += ki * error * TS; integral = fmaxf(-50.0f, fminf(50.0f, integral)); // Anti-windup float derivative = -(sensorData.pressure - prevError) / TS; prevError = sensorData.pressure; output = kp * error + integral + kd * derivative; output = fmaxf(0.0f, fminf(100.0f, output)); } else { output = 0.0f; integral = 0.0f; } // Применяем управляющий сигнал VFD_SetFrequency(output * 0.5f); // 0-100% → 0-50 Гц } else { // Таймаут ожидания данных датчика — авария LOG_ERROR("Sensor data timeout!"); running = false; output = 0; VFD_SetFrequency(0); } } } // ===== ЗАДАЧА 3: MODBUS SLAVE (Приоритет 3) ===== static void vModbusTask(void *pvParam) { uint8_t rxBuf[64]; uint8_t rxLen = 0; LOG_INFO("Modbus task started"); for (;;) { // Ждём байт из UART (через семафор от прерывания) if (UART_WaitForData(rxBuf, &rxLen, pdMS_TO_TICKS(100))) { // Обрабатываем Modbus запрос if (Modbus_ProcessRequest(rxBuf, rxLen)) { // Если команда — отправляем в очередь управления Command_t cmd; if (Modbus_ExtractCommand(&cmd)) { xQueueSend(xCommandQueue, &cmd, pdMS_TO_TICKS(10)); } } } } } // ===== ЗАДАЧА 4: ЛОГИРОВАНИЕ (Приоритет 1, самый низкий) ===== static void vLoggingTask(void *pvParam) { LogMessage_t msg; const char *levelNames[] = {"DBG", "INF", "WRN", "ERR"}; for (;;) { // Ждём сообщение из очереди if (xQueueReceive(xLogQueue, &msg, portMAX_DELAY) == pdTRUE) { // Пишем в UART (захватываем мьютекс) if (xSemaphoreTake(xUARTMutex, pdMS_TO_TICKS(50)) == pdTRUE) { printf("[%6lu][%s] %s\r\n", (unsigned long)msg.timestamp_ms, levelNames[msg.level % 4], msg.message); xSemaphoreGive(xUARTMutex); } // Пишем на SD-карту (низкий приоритет = не мешаем критичным задачам) // SD_AppendLog(&msg); } } } // ===== ТАЙМЕР HEARTBEAT ===== static void vHeartbeatCallback(TimerHandle_t xTimer) { // Мигаем светодиодом — система жива HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); } // ===== ИНИЦИАЛИЗАЦИЯ ===== void App_Init(void) { // Создаём очереди xSensorQueue = xQueueCreate(5, sizeof(SensorData_t)); xCommandQueue = xQueueCreate(10, sizeof(Command_t)); xLogQueue = xQueueCreate(20, sizeof(LogMessage_t)); // Создаём мьютексы xI2CMutex = xSemaphoreCreateMutex(); xUARTMutex = xSemaphoreCreateMutex(); // Создаём задачи xTaskCreate(vSensorTask, "Sensors", 512, NULL, 4, NULL); xTaskCreate(vControlTask, "Control", 1024, NULL, 5, NULL); xTaskCreate(vModbusTask, "Modbus", 512, NULL, 3, NULL); xTaskCreate(vLoggingTask, "Logging", 256, NULL, 1, NULL); // Создаём таймер heartbeat (500 мс) xHeartbeatTimer = xTimerCreate("Heartbeat", pdMS_TO_TICKS(500), pdTRUE, NULL, vHeartbeatCallback); xTimerStart(xHeartbeatTimer, 0); // Запуск планировщика vTaskStartScheduler(); // Никогда не должно дойти сюда! for (;;); } Очереди: безопасная передача данных между задачамиОчередь — это основной механизм коммуникации в FreeRTOS. Thread-safe, FIFO, блокирующий. // Создание очереди на 10 элементов типа uint32_t QueueHandle_t xQueue = xQueueCreate(10, sizeof(uint32_t)); // Отправка (из задачи) uint32_t value = 42; xQueueSend(xQueue, &value, pdMS_TO_TICKS(100)); // Ждём 100мс если полная // Отправка с высоким приоритетом (в начало очереди) xQueueSendToFront(xQueue, &value, 0); // Отправка из прерывания (другая функция!) BaseType_t xHigherPriorityTaskWoken = pdFALSE; xQueueSendFromISR(xQueue, &value, &xHigherPriorityTaskWoken); portYIELD_FROM_ISR(xHigherPriorityTaskWoken); // Уступить если нужно // Приём (блокирует до данных или таймаута) uint32_t received; if (xQueueReceive(xQueue, &received, portMAX_DELAY) == pdTRUE) { // Данные получены } // "Подсмотреть" без извлечения xQueuePeek(xQueue, &received, 0); // Мониторинг UBaseType_t count = uxQueueMessagesWaiting(xQueue); // Сколько элементов UBaseType_t space = uxQueueSpacesAvailable(xQueue); // Сколько свободно Семафоры и мьютексы: защита разделяемых ресурсов// ===== МЬЮТЕКС (Mutual Exclusion) ===== // Для защиты ресурсов (I2C, SPI, UART, глобальные переменные) SemaphoreHandle_t xMutex = xSemaphoreCreateMutex(); // Правильный паттерн: void safe_i2c_read(uint8_t addr, uint8_t reg, uint8_t *buf, uint8_t len) { if (xSemaphoreTake(xMutex, pdMS_TO_TICKS(100)) == pdTRUE) { HAL_I2C_Mem_Read(&hi2c1, addr, reg, 1, buf, len, 100); xSemaphoreGive(xMutex); } else { // Таймаут — логируем, возвращаем ошибку } } // ===== ДВОИЧНЫЙ СЕМАФОР (уведомление о событии) ===== // Задача ждёт событие от ISR SemaphoreHandle_t xDataReadySemaphore = xSemaphoreCreateBinary(); // В прерывании (данные готовы): void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { BaseType_t xWoken = pdFALSE; xSemaphoreGiveFromISR(xDataReadySemaphore, &xWoken); portYIELD_FROM_ISR(xWoken); } // В задаче (ждём данные): void vProcessingTask(void *pvParam) { for (;;) { // Эффективное ожидание — задача не потребляет CPU! xSemaphoreTake(xDataReadySemaphore, portMAX_DELAY); // Данные готовы — обрабатываем process_uart_data(); } } // ===== СЧЁТНЫЙ СЕМАФОР (ограничение конкурентного доступа) ===== // Пример: максимум 3 одновременных подключения SemaphoreHandle_t xConnectionSlots = xSemaphoreCreateCounting(3, 3); void handle_new_connection() { if (xSemaphoreTake(xConnectionSlots, pdMS_TO_TICKS(5000)) == pdTRUE) { // Слот получен serve_client(); xSemaphoreGive(xConnectionSlots); // Освободить слот } else { // Нет свободных слотов send_busy_response(); } } Программные таймеры// Таймер однократный (one-shot) vs периодический TimerHandle_t xOneShotTimer; TimerHandle_t xPeriodicTimer; void vTimerCallback(TimerHandle_t xTimer) { // pvTimerGetTimerID позволяет использовать один callback для многих таймеров uint32_t timerID = (uint32_t)pvTimerGetTimerID(xTimer); switch (timerID) { case 1: // Однократный таймер — отключить нагреватель через 30 сек Heater_Off(); break; case 2: // Периодический — опрос watchdog External_WDT_Kick(); break; } } void setup_timers(void) { // One-shot таймер (не перезапускается автоматически) xOneShotTimer = xTimerCreate( "Heater", pdMS_TO_TICKS(30000), // 30 секунд pdFALSE, // pdFALSE = one-shot (void *)1, // ID таймера vTimerCallback ); // Периодический таймер xPeriodicTimer = xTimerCreate( "WDT", pdMS_TO_TICKS(500), // 500 мс pdTRUE, // pdTRUE = периодический (void *)2, vTimerCallback ); xTimerStart(xPeriodicTimer, 0); // Запустить один-шот когда нужно: // xTimerStart(xOneShotTimer, 0); // Сбросить периодический (перезапустить отсчёт): // xTimerReset(xPeriodicTimer, 0); // Изменить период на лету: // xTimerChangePeriod(xPeriodicTimer, pdMS_TO_TICKS(1000), 0); } Управление памятью и отладка// Мониторинг стека задачи (важно для нахождения переполнений!) void vCheckStackTask(void *pvParam) { for (;;) { vTaskDelay(pdMS_TO_TICKS(5000)); // Минимальный остаток стека (в словах) с начала работы UBaseType_t hwm = uxTaskGetStackHighWaterMark(NULL); if (hwm < 50) { // Меньше 50 слов — опасно! printf("WARNING: Task '%s' stack low! HWM=%lu words\r\n", pcTaskGetName(NULL), (unsigned long)hwm); } } } // Вывод информации о всех задачах (для отладки) void vPrintTaskStats(void) { char buffer[512]; vTaskList(buffer); // Требует configUSE_TRACE_FACILITY=1 printf("Task Name\t\tState\tPrio\tStack\tNum\r\n%s", buffer); // Загрузка CPU по задачам (требует configGENERATE_RUN_TIME_STATS=1) vTaskGetRunTimeStats(buffer); printf("\r\nTask\t\t\tTime\t\t%%\r\n%s", buffer); } // Обработчик нехватки памяти void vApplicationMallocFailedHook(void) { taskDISABLE_INTERRUPTS(); printf("FATAL: malloc failed! Heap exhausted.\r\n"); for (;;); } // Переполнение стека задачи void vApplicationStackOverflowHook(TaskHandle_t xTask, char *pcTaskName) { taskDISABLE_INTERRUPTS(); printf("FATAL: Stack overflow in task '%s'!\r\n", pcTaskName); for (;;); } FreeRTOS на ESP32ESP-IDF (официальный SDK ESP32) использует FreeRTOS как основу. На двухядерном ESP32 задачи можно привязывать к конкретному ядру: // ESP32-специфичное создание задачи с указанием ядра xTaskCreatePinnedToCore( vWiFiTask, // Функция "WiFi", // Имя 8192, // Стек (в байтах для ESP32!) NULL, // Параметры 5, // Приоритет &xWiFiHandle, // Хендл 0 // Ядро: 0 = Protocol CPU, 1 = Application CPU ); // WiFi и Bluetooth — всегда на ядре 0 (Protocol CPU) // Ваш код — лучше на ядре 1 (Application CPU) // Это разделяет сетевой стек и бизнес-логику // Встроенный мониторинг задач ESP-IDF: void print_esp_task_info(void) { printf("Free heap: %u bytes\r\n", esp_get_free_heap_size()); printf("Min free heap: %u bytes\r\n", esp_get_minimum_free_heap_size()); } Типичные ошибки FreeRTOS1. Вызов обычных функций из ISR // НЕПРАВИЛЬНО — заблокирует прерывание! void HAL_GPIO_EXTI_Callback(uint16_t pin) { xQueueSend(xQueue, &data, portMAX_DELAY); // ОШИБКА: блокирует ISR! } // ПРАВИЛЬНО — FromISR версии функций: void HAL_GPIO_EXTI_Callback(uint16_t pin) { BaseType_t xWoken = pdFALSE; xQueueSendFromISR(xQueue, &data, &xWoken); portYIELD_FROM_ISR(xWoken); } 2. Бесконечная задача без yield // НЕПРАВИЛЬНО — монополизирует процессор! void vBadTask(void *p) { for (;;) { do_something(); // Нет vTaskDelay или блокирующего ожидания! } } // ПРАВИЛЬНО: void vGoodTask(void *p) { for (;;) { do_something(); vTaskDelay(pdMS_TO_TICKS(10)); // Уступаем хотя бы 10 мс } } 3. Доступ к глобальным данным без защиты // НЕПРАВИЛЬНО — race condition! float g_temperature = 0; void vSensor(void *p) { g_temperature = read_sensor(); } void vControl(void *p) { if (g_temperature > 80) alarm(); } // ПРАВИЛЬНО — через очередь или мьютекс ЗаключениеFreeRTOS превращает микроконтроллер из последовательного автомата в полноценную многозадачную систему. Это не усложнение ради усложнения — это решение реальных проблем: независимость задач, чёткие интерфейсы через очереди, защита ресурсов через мьютексы. Начните с малого: замените суперцикл двумя задачами — одна читает датчик, другая управляет выходом, общаются через очередь. Это уже даст почувствовать преимущества. FreeRTOS поддерживается на STM32, ESP32, Arduino (с ограничениями), Raspberry Pi Pico и десятках других платформ. Документация на freertos.org — отличная, с примерами и объяснениями. -
 Зачем специализированная БД для временных рядовТехнологические данные — это всегда временной ряд: температура каждую секунду, давление каждые 100 мс, состояние оборудования каждые 10 мс. PostgreSQL или MySQL могут хранить такие данные. Но при миллионах записей в день начинаются проблемы. Почему реляционные БД плохо справляются: Индексы B-Tree неэффективны для временных запросов ("за последний час") Запись строк в таблицу с индексами — медленно при высоком темпе GROUP BY time_interval требует дорогих вычислений Партиционирование по времени нужно настраивать вручную Хранение тысяч тегов → тысячи колонок или плохая схема Что умеют Time-Series TSDB: Оптимизированная запись: 100 000+ точек/сек на скромном железе Встроенное сжатие (delta-delta, XOR float compression) Автоматические retention policies (TTL данных) Downsampling: автоматически агрегируем "горячие" данные в "холодные" Встроенные временны́е функции: moving average, rate, derivative InfluxDB 2.x: промышленный стандарт IoTОсновные концепцииMeasurement — аналог таблицы: measurement: "telemetry" Tags — индексированные метаданные (строки): tags: device="conveyor1", location="line1", area="factory" Fields — неиндексированные данные (числа, строки, bool): fields: temperature=87.3, current=15.5, running=true Timestamp — время с нано-точностью. Точка данных (Point): measurement,tags fields timestamp telemetry,device=conveyor1,location=line1 temperature=87.3,current=15.5 1710000000000000000 Почему Tags vs Fields важноTags: ИНДЕКСИРОВАНЫ → используйте для группировки/фильтрации device, location, sensor_type, unit_id Fields: НЕ индексированы → используйте для числовых данных temperature, pressure, current, voltage ОШИБКА: положить temperature в Tag — поиск по значению работает, но карданальность огромная → индекс разрастётся → InfluxDB замедлится. ОШИБКА: положить device_id в Field — нельзя эффективно фильтровать по устройству. Python клиент InfluxDB 2.x:from influxdb_client import InfluxDBClient, Point, WritePrecision from influxdb_client.client.write_api import SYNCHRONOUS, WriteOptions from datetime import datetime, timezone import time INFLUX_URL = "http://localhost:8086" INFLUX_TOKEN = "your-api-token-here" INFLUX_ORG = "factory" INFLUX_BUCKET = "process_data" # Клиент с батчевой записью client = InfluxDBClient(url=INFLUX_URL, token=INFLUX_TOKEN, org=INFLUX_ORG) write_api = client.write_api(write_options=WriteOptions( batch_size = 1000, # Накапливаем до 1000 точек flush_interval = 5_000, # Или сбрасываем каждые 5 секунд jitter_interval = 500, # ±500мс для сглаживания нагрузки retry_interval = 5_000, # Retry при ошибке через 5с max_retry_time = 180_000, # Максимум 3 минуты retry )) query_api = client.query_api() # ===== ЗАПИСЬ ===== def write_single_point(device: str, location: str, temperature: float, current: float, running: bool): """Запись одной точки""" point = ( Point("telemetry") .tag("device", device) .tag("location", location) .field("temperature", temperature) .field("current", current) .field("running", int(running)) # bool → int (InfluxDB лучше хранит) .time(datetime.now(timezone.utc)) ) write_api.write(bucket=INFLUX_BUCKET, record=point) def write_batch(measurements: list[dict]): """ Эффективная пакетная запись. measurements: [{'device': 'pump1', 'temp': 25.3, 'current': 12.1}, ...] """ points = [] for m in measurements: p = ( Point("telemetry") .tag("device", m['device']) .tag("location", m.get('location', 'unknown')) .field("temperature", float(m.get('temp', 0))) .field("current", float(m.get('current', 0))) .field("pressure", float(m.get('pressure', 0))) ) points.append(p) write_api.write(bucket=INFLUX_BUCKET, record=points) # Запись в нативном line protocol (максимальная производительность): def write_line_protocol(lines: list[str]): """ Прямая запись в line protocol — самый быстрый способ. Формат: measurement[,tag=value...] field=value[,field=value...] [timestamp] """ write_api.write(bucket=INFLUX_BUCKET, record='\n'.join(lines), write_precision=WritePrecision.NANOSECONDS) # Пример: lines = [ "telemetry,device=pump1,location=line1 temperature=87.3,current=15.5 1710000000000000000", "telemetry,device=pump2,location=line1 temperature=72.1,current=8.2 1710000000000000000", "telemetry,device=valve1,location=line2 position=75.0 1710000000000000000", ] write_line_protocol(lines) # ===== ЗАПРОСЫ (Flux) ===== def query_last_hour(device: str) -> list[dict]: """Последний час данных устройства""" flux = f''' from(bucket: "{INFLUX_BUCKET}") |> range(start: -1h) |> filter(fn: (r) => r._measurement == "telemetry") |> filter(fn: (r) => r.device == "{device}") |> filter(fn: (r) => r._field == "temperature" or r._field == "current") |> pivot(rowKey: ["_time"], columnKey: ["_field"], valueColumn: "_value") |> sort(columns: ["_time"]) ''' tables = query_api.query(flux) results = [] for table in tables: for record in table.records: results.append({ 'time': record.get_time().isoformat(), 'temperature': record.values.get('temperature'), 'current': record.values.get('current'), }) return results def query_aggregated_stats(device: str, window: str = "5m", range_start: str = "-24h") -> list[dict]: """ Агрегированная статистика по временным окнам. window: "1m", "5m", "1h", "1d" """ flux = f''' from(bucket: "{INFLUX_BUCKET}") |> range(start: {range_start}) |> filter(fn: (r) => r._measurement == "telemetry" and r.device == "{device}") |> filter(fn: (r) => r._field == "temperature") |> aggregateWindow( every: {window}, fn: (tables=<-, column) => tables |> reduce( identity: {{mean: 0.0, min: 99999.0, max: -99999.0, count: 0}}, fn: (r, accumulator) => ({{ mean: accumulator.mean + r._value, min: if r._value < accumulator.min then r._value else accumulator.min, max: if r._value > accumulator.max then r._value else accumulator.max, count: accumulator.count + 1, }}) ), createEmpty: false ) ''' # Для простого avg/min/max лучше использовать встроенные функции: flux_simple = f''' from(bucket: "{INFLUX_BUCKET}") |> range(start: {range_start}) |> filter(fn: (r) => r._measurement == "telemetry" and r.device == "{device}" and r._field == "temperature") |> aggregateWindow(every: {window}, fn: mean, createEmpty: false) |> yield(name: "mean") ''' tables = query_api.query(flux_simple) return [{'time': r.get_time().isoformat(), 'mean_temp': r.get_value()} for table in tables for r in table.records] def query_anomalies(threshold_high: float = 85.0, range_start: str = "-7d") -> list[dict]: """Поиск аномалий — превышений порога""" flux = f''' from(bucket: "{INFLUX_BUCKET}") |> range(start: {range_start}) |> filter(fn: (r) => r._measurement == "telemetry" and r._field == "temperature") |> filter(fn: (r) => r._value > {threshold_high}) |> group(columns: ["device"]) |> sort(columns: ["_time"], desc: true) ''' tables = query_api.query(flux) return [{ 'device': r.values.get('device'), 'time': r.get_time().isoformat(), 'value': r.get_value(), 'excess': round(r.get_value() - threshold_high, 2), } for table in tables for r in table.records] def query_device_availability(range_start: str = "-30d") -> list[dict]: """Доступность (availability) по устройствам за период""" flux = f''' import "math" total = from(bucket: "{INFLUX_BUCKET}") |> range(start: {range_start}) |> filter(fn: (r) => r._measurement == "telemetry" and r._field == "running") |> group(columns: ["device"]) |> count() |> rename(columns: {{_value: "total_count"}}) running = from(bucket: "{INFLUX_BUCKET}") |> range(start: {range_start}) |> filter(fn: (r) => r._measurement == "telemetry" and r._field == "running") |> filter(fn: (r) => r._value == 1) |> group(columns: ["device"]) |> count() |> rename(columns: {{_value: "running_count"}}) join(tables: {{total, running}}, on: ["device"]) |> map(fn: (r) => ({{ r with availability_pct: math.round(x: r.running_count / r.total_count * 1000.0) / 10.0 }})) ''' tables = query_api.query(flux) return [{'device': r.values.get('device'), 'availability': r.values.get('availability_pct')} for table in tables for r in table.records] Retention Policies и DownsamplingХранить сырые данные с секундным разрешением 10 лет — безумно дорого. Правильная стратегия: "Горячие" данные: 1 секунда, 30 дней → быстрый SSD "Тёплые" данные: 1 минута, 1 год → обычный SSD "Холодные" данные: 1 час, 10 лет → HDD/объектное хранилище Конфигурация в InfluxDB 2.x:# Создание bucket с retention 30 дней (сырые данные) influx bucket create \ --name process_data_raw \ --retention 30d \ --org factory # Bucket для агрегированных данных (бессрочно) influx bucket create \ --name process_data_aggregated \ --retention 0 \ --org factory Задача downsampling (Flux):def setup_downsampling_task(): """ Создаём задачу InfluxDB для автоматического downsampling. Каждые 5 минут агрегируем сырые данные в минутные. """ flux_task = ''' option task = { name: "Downsampling: raw→1min", every: 5m, // Запускать каждые 5 минут offset: 1m, // Смещение (ждём пока данные придут) } // Читаем сырые данные за последние 5 минут data = from(bucket: "process_data_raw") |> range(start: -task.every) |> filter(fn: (r) => r._measurement == "telemetry") // Агрегируем каждую числовую метрику data |> filter(fn: (r) => r._field == "temperature" or r._field == "current" or r._field == "pressure") |> aggregateWindow(every: 1m, fn: mean, createEmpty: false) |> set(key: "_measurement", value: "telemetry_1m") |> to(bucket: "process_data_aggregated") // Для бинарных данных (running) — используем last data |> filter(fn: (r) => r._field == "running") |> aggregateWindow(every: 1m, fn: last, createEmpty: false) |> set(key: "_measurement", value: "telemetry_1m") |> to(bucket: "process_data_aggregated") ''' # Создание задачи через API tasks_api = client.tasks_api() task = tasks_api.create_task_every( name="Downsampling: raw→1min", flux=flux_task, every="5m", organization=INFLUX_ORG ) print(f"Задача создана: {task.id}") TimescaleDB: PostgreSQL для временных рядовTimescaleDB — расширение PostgreSQL. Если вы уже используете PostgreSQL и знаете SQL — это лучший выбор. Вы получаете TSDB-оптимизации при сохранении полного SQL. -- Установка расширения CREATE EXTENSION IF NOT EXISTS timescaledb; -- Обычная таблица PostgreSQL CREATE TABLE telemetry ( time TIMESTAMPTZ NOT NULL, device TEXT NOT NULL, location TEXT NOT NULL, temperature FLOAT, current FLOAT, pressure FLOAT, running BOOLEAN, quality TEXT DEFAULT 'GOOD' ); -- Превращаем в hypertable (TimescaleDB магия!) SELECT create_hypertable('telemetry', 'time', chunk_time_interval => INTERVAL '1 day' -- Партиция = 1 день ); -- Индекс на часто используемые теги CREATE INDEX ON telemetry (device, time DESC); CREATE INDEX ON telemetry (location, time DESC); -- Compression (сжатие старых данных) ALTER TABLE telemetry SET ( timescaledb.compress, timescaledb.compress_segmentby = 'device', timescaledb.compress_orderby = 'time DESC' ); -- Автоматическое сжатие данных старше 7 дней SELECT add_compression_policy('telemetry', INTERVAL '7 days'); -- Автоматическое удаление старых данных (30 дней) SELECT add_retention_policy('telemetry', INTERVAL '30 days'); Запросы (обычный SQL!):-- Последний час данных с устройства SELECT time, temperature, current, running FROM telemetry WHERE device = 'pump1' AND time > NOW() - INTERVAL '1 hour' ORDER BY time DESC; -- Среднее по 5-минутным окнам SELECT time_bucket('5 minutes', time) AS bucket, device, ROUND(AVG(temperature)::numeric, 2) AS avg_temp, ROUND(MIN(temperature)::numeric, 2) AS min_temp, ROUND(MAX(temperature)::numeric, 2) AS max_temp, COUNT(*) AS samples FROM telemetry WHERE device = 'pump1' AND time > NOW() - INTERVAL '24 hours' GROUP BY bucket, device ORDER BY bucket DESC; -- Обнаружение аномалий (значение > avg + 2*stddev) WITH stats AS ( SELECT device, AVG(temperature) AS avg_temp, STDDEV(temperature) AS std_temp FROM telemetry WHERE time > NOW() - INTERVAL '7 days' GROUP BY device ) SELECT t.time, t.device, t.temperature, s.avg_temp, s.std_temp, (t.temperature - s.avg_temp) / NULLIF(s.std_temp, 0) AS z_score FROM telemetry t JOIN stats s ON t.device = s.device WHERE t.time > NOW() - INTERVAL '24 hours' AND ABS((t.temperature - s.avg_temp) / NULLIF(s.std_temp, 0)) > 2.0 ORDER BY ABS((t.temperature - s.avg_temp) / NULLIF(s.std_temp, 0)) DESC LIMIT 50; -- Доступность оборудования за месяц SELECT device, COUNT(*) FILTER (WHERE running = true) AS running_count, COUNT(*) AS total_count, ROUND( COUNT(*) FILTER (WHERE running = true)::numeric / COUNT(*) * 100, 1 ) AS availability_pct, SUM(CASE WHEN running THEN 1 ELSE 0 END) * EXTRACT(EPOCH FROM INTERVAL '1 second') / 3600.0 AS running_hours FROM telemetry WHERE time > NOW() - INTERVAL '30 days' GROUP BY device ORDER BY availability_pct DESC; Непрерывные агрегации (Continuous Aggregates):-- Создаём материализованное представление с автообновлением CREATE MATERIALIZED VIEW telemetry_5min WITH (timescaledb.continuous) AS SELECT time_bucket('5 minutes', time) AS bucket, device, location, AVG(temperature) AS avg_temp, MIN(temperature) AS min_temp, MAX(temperature) AS max_temp, AVG(current) AS avg_current, MAX(current) AS max_current, BOOL_OR(running) AS any_running, COUNT(*) AS sample_count FROM telemetry GROUP BY bucket, device, location WITH NO DATA; -- Автоматическое обновление каждые 5 минут SELECT add_continuous_aggregate_policy('telemetry_5min', start_offset => INTERVAL '15 minutes', end_offset => INTERVAL '5 minutes', schedule_interval => INTERVAL '5 minutes' ); -- Запрос к агрегированным данным (мгновенно!) SELECT * FROM telemetry_5min WHERE device = 'pump1' AND bucket > NOW() - INTERVAL '24 hours' ORDER BY bucket DESC; Python + SQLAlchemy + TimescaleDB:from sqlalchemy import create_engine, text from sqlalchemy.orm import Session import pandas as pd from datetime import datetime, timedelta, timezone DATABASE_URL = "postgresql://user:password@localhost:5432/factory_db" engine = create_engine(DATABASE_URL, pool_size=10, max_overflow=20) class TelemetryRepository: def write_batch(self, records: list[dict]) -> int: """Пакетная запись телеметрии""" if not records: return 0 with engine.begin() as conn: result = conn.execute( text(""" INSERT INTO telemetry (time, device, location, temperature, current, pressure, running) VALUES (:time, :device, :location, :temperature, :current, :pressure, :running) ON CONFLICT DO NOTHING """), records ) return result.rowcount def get_latest(self, device: str, fields: list[str] = None) -> dict | None: """Последнее значение устройства""" field_list = ', '.join(fields or ['temperature', 'current', 'pressure', 'running']) with engine.connect() as conn: row = conn.execute( text(f""" SELECT time, {field_list} FROM telemetry WHERE device = :device ORDER BY time DESC LIMIT 1 """), {'device': device} ).fetchone() return dict(row._mapping) if row else None def get_as_dataframe(self, device: str, hours: int = 24) -> pd.DataFrame: """Загрузка данных в Pandas DataFrame для анализа""" query = text(""" SELECT time, temperature, current, pressure, running FROM telemetry WHERE device = :device AND time > :since ORDER BY time """) with engine.connect() as conn: df = pd.read_sql( query, conn, params={'device': device, 'since': datetime.now(timezone.utc) - timedelta(hours=hours)}, parse_dates=['time'], index_col='time' ) return df def detect_anomalies_zscore(self, device: str, field: str = 'temperature', threshold: float = 2.5) -> pd.DataFrame: """Обнаружение аномалий методом z-score""" df = self.get_as_dataframe(device, hours=24) if df.empty or field not in df.columns: return pd.DataFrame() mean = df[field].mean() std = df[field].std() if std == 0: return pd.DataFrame() df['z_score'] = (df[field] - mean) / std anomalies = df[df['z_score'].abs() > threshold].copy() anomalies['is_high'] = anomalies['z_score'] > 0 return anomalies[['z_score', field, 'is_high']] def get_equipment_report(self, days: int = 30) -> pd.DataFrame: """Отчёт по оборудованию за период""" query = text(""" SELECT device, COUNT(*) as total_records, COUNT(*) FILTER (WHERE running) as running_records, ROUND((COUNT(*) FILTER (WHERE running)::numeric / COUNT(*) * 100)::numeric, 1) as availability_pct, ROUND(AVG(temperature)::numeric, 1) as avg_temp, ROUND(MAX(temperature)::numeric, 1) as max_temp, ROUND(AVG(current)::numeric, 2) as avg_current FROM telemetry WHERE time > NOW() - MAKE_INTERVAL(days => :days) GROUP BY device ORDER BY device """) with engine.connect() as conn: return pd.read_sql(query, conn, params={'days': days}) Выбор TSDB: сравнительная таблицаКритерий InfluxDB 2.x TimescaleDB Prometheus Основа Собственный движок PostgreSQL Собственный Язык запросов Flux (мощный, непривычный) SQL PromQL Производительность записи ★★★★★ ★★★★ ★★★ SQL-совместимость ❌ ✅ (полная) ❌ Сжатие ★★★★★ ★★★★ ★★★ Масштабирование InfluxDB Enterprise TimescaleDB Thanos/Cortex Лицензия BSL (OSS ограничен) Apache 2 Apache 2 Интеграция с Grafana ★★★★★ ★★★★★ ★★★★★ Лучше для IoT, большой объём тегов Существующий PostgreSQL-стек DevOps мониторинг ЗаключениеВыбор TSDB зависит от контекста. InfluxDB — лучший выбор для чистых IoT/телеметрия проектов: максимальная производительность, мощный Flux для временны́х вычислений, отличная экосистема. TimescaleDB — если уже есть PostgreSQL инфраструктура, нужны JOINs с другими данными или разработчики лучше знают SQL. Ключевые принципы для production: всегда настраивайте retention policies (данные должны автоматически удаляться), используйте downsampling для долгосрочного хранения агрегатов, настройте сжатие (экономия 90%+ дискового пространства), мониторьте производительность самой TSDB. Deadband-фильтрация на уровне edge-узла (не писать если значение не изменилось существенно) снижает нагрузку на БД в 5–50 раз для медленно меняющихся процессов. Это первое что нужно сделать перед любой оптимизацией TSDB.
Зачем специализированная БД для временных рядовТехнологические данные — это всегда временной ряд: температура каждую секунду, давление каждые 100 мс, состояние оборудования каждые 10 мс. PostgreSQL или MySQL могут хранить такие данные. Но при миллионах записей в день начинаются проблемы. Почему реляционные БД плохо справляются: Индексы B-Tree неэффективны для временных запросов ("за последний час") Запись строк в таблицу с индексами — медленно при высоком темпе GROUP BY time_interval требует дорогих вычислений Партиционирование по времени нужно настраивать вручную Хранение тысяч тегов → тысячи колонок или плохая схема Что умеют Time-Series TSDB: Оптимизированная запись: 100 000+ точек/сек на скромном железе Встроенное сжатие (delta-delta, XOR float compression) Автоматические retention policies (TTL данных) Downsampling: автоматически агрегируем "горячие" данные в "холодные" Встроенные временны́е функции: moving average, rate, derivative InfluxDB 2.x: промышленный стандарт IoTОсновные концепцииMeasurement — аналог таблицы: measurement: "telemetry" Tags — индексированные метаданные (строки): tags: device="conveyor1", location="line1", area="factory" Fields — неиндексированные данные (числа, строки, bool): fields: temperature=87.3, current=15.5, running=true Timestamp — время с нано-точностью. Точка данных (Point): measurement,tags fields timestamp telemetry,device=conveyor1,location=line1 temperature=87.3,current=15.5 1710000000000000000 Почему Tags vs Fields важноTags: ИНДЕКСИРОВАНЫ → используйте для группировки/фильтрации device, location, sensor_type, unit_id Fields: НЕ индексированы → используйте для числовых данных temperature, pressure, current, voltage ОШИБКА: положить temperature в Tag — поиск по значению работает, но карданальность огромная → индекс разрастётся → InfluxDB замедлится. ОШИБКА: положить device_id в Field — нельзя эффективно фильтровать по устройству. Python клиент InfluxDB 2.x:from influxdb_client import InfluxDBClient, Point, WritePrecision from influxdb_client.client.write_api import SYNCHRONOUS, WriteOptions from datetime import datetime, timezone import time INFLUX_URL = "http://localhost:8086" INFLUX_TOKEN = "your-api-token-here" INFLUX_ORG = "factory" INFLUX_BUCKET = "process_data" # Клиент с батчевой записью client = InfluxDBClient(url=INFLUX_URL, token=INFLUX_TOKEN, org=INFLUX_ORG) write_api = client.write_api(write_options=WriteOptions( batch_size = 1000, # Накапливаем до 1000 точек flush_interval = 5_000, # Или сбрасываем каждые 5 секунд jitter_interval = 500, # ±500мс для сглаживания нагрузки retry_interval = 5_000, # Retry при ошибке через 5с max_retry_time = 180_000, # Максимум 3 минуты retry )) query_api = client.query_api() # ===== ЗАПИСЬ ===== def write_single_point(device: str, location: str, temperature: float, current: float, running: bool): """Запись одной точки""" point = ( Point("telemetry") .tag("device", device) .tag("location", location) .field("temperature", temperature) .field("current", current) .field("running", int(running)) # bool → int (InfluxDB лучше хранит) .time(datetime.now(timezone.utc)) ) write_api.write(bucket=INFLUX_BUCKET, record=point) def write_batch(measurements: list[dict]): """ Эффективная пакетная запись. measurements: [{'device': 'pump1', 'temp': 25.3, 'current': 12.1}, ...] """ points = [] for m in measurements: p = ( Point("telemetry") .tag("device", m['device']) .tag("location", m.get('location', 'unknown')) .field("temperature", float(m.get('temp', 0))) .field("current", float(m.get('current', 0))) .field("pressure", float(m.get('pressure', 0))) ) points.append(p) write_api.write(bucket=INFLUX_BUCKET, record=points) # Запись в нативном line protocol (максимальная производительность): def write_line_protocol(lines: list[str]): """ Прямая запись в line protocol — самый быстрый способ. Формат: measurement[,tag=value...] field=value[,field=value...] [timestamp] """ write_api.write(bucket=INFLUX_BUCKET, record='\n'.join(lines), write_precision=WritePrecision.NANOSECONDS) # Пример: lines = [ "telemetry,device=pump1,location=line1 temperature=87.3,current=15.5 1710000000000000000", "telemetry,device=pump2,location=line1 temperature=72.1,current=8.2 1710000000000000000", "telemetry,device=valve1,location=line2 position=75.0 1710000000000000000", ] write_line_protocol(lines) # ===== ЗАПРОСЫ (Flux) ===== def query_last_hour(device: str) -> list[dict]: """Последний час данных устройства""" flux = f''' from(bucket: "{INFLUX_BUCKET}") |> range(start: -1h) |> filter(fn: (r) => r._measurement == "telemetry") |> filter(fn: (r) => r.device == "{device}") |> filter(fn: (r) => r._field == "temperature" or r._field == "current") |> pivot(rowKey: ["_time"], columnKey: ["_field"], valueColumn: "_value") |> sort(columns: ["_time"]) ''' tables = query_api.query(flux) results = [] for table in tables: for record in table.records: results.append({ 'time': record.get_time().isoformat(), 'temperature': record.values.get('temperature'), 'current': record.values.get('current'), }) return results def query_aggregated_stats(device: str, window: str = "5m", range_start: str = "-24h") -> list[dict]: """ Агрегированная статистика по временным окнам. window: "1m", "5m", "1h", "1d" """ flux = f''' from(bucket: "{INFLUX_BUCKET}") |> range(start: {range_start}) |> filter(fn: (r) => r._measurement == "telemetry" and r.device == "{device}") |> filter(fn: (r) => r._field == "temperature") |> aggregateWindow( every: {window}, fn: (tables=<-, column) => tables |> reduce( identity: {{mean: 0.0, min: 99999.0, max: -99999.0, count: 0}}, fn: (r, accumulator) => ({{ mean: accumulator.mean + r._value, min: if r._value < accumulator.min then r._value else accumulator.min, max: if r._value > accumulator.max then r._value else accumulator.max, count: accumulator.count + 1, }}) ), createEmpty: false ) ''' # Для простого avg/min/max лучше использовать встроенные функции: flux_simple = f''' from(bucket: "{INFLUX_BUCKET}") |> range(start: {range_start}) |> filter(fn: (r) => r._measurement == "telemetry" and r.device == "{device}" and r._field == "temperature") |> aggregateWindow(every: {window}, fn: mean, createEmpty: false) |> yield(name: "mean") ''' tables = query_api.query(flux_simple) return [{'time': r.get_time().isoformat(), 'mean_temp': r.get_value()} for table in tables for r in table.records] def query_anomalies(threshold_high: float = 85.0, range_start: str = "-7d") -> list[dict]: """Поиск аномалий — превышений порога""" flux = f''' from(bucket: "{INFLUX_BUCKET}") |> range(start: {range_start}) |> filter(fn: (r) => r._measurement == "telemetry" and r._field == "temperature") |> filter(fn: (r) => r._value > {threshold_high}) |> group(columns: ["device"]) |> sort(columns: ["_time"], desc: true) ''' tables = query_api.query(flux) return [{ 'device': r.values.get('device'), 'time': r.get_time().isoformat(), 'value': r.get_value(), 'excess': round(r.get_value() - threshold_high, 2), } for table in tables for r in table.records] def query_device_availability(range_start: str = "-30d") -> list[dict]: """Доступность (availability) по устройствам за период""" flux = f''' import "math" total = from(bucket: "{INFLUX_BUCKET}") |> range(start: {range_start}) |> filter(fn: (r) => r._measurement == "telemetry" and r._field == "running") |> group(columns: ["device"]) |> count() |> rename(columns: {{_value: "total_count"}}) running = from(bucket: "{INFLUX_BUCKET}") |> range(start: {range_start}) |> filter(fn: (r) => r._measurement == "telemetry" and r._field == "running") |> filter(fn: (r) => r._value == 1) |> group(columns: ["device"]) |> count() |> rename(columns: {{_value: "running_count"}}) join(tables: {{total, running}}, on: ["device"]) |> map(fn: (r) => ({{ r with availability_pct: math.round(x: r.running_count / r.total_count * 1000.0) / 10.0 }})) ''' tables = query_api.query(flux) return [{'device': r.values.get('device'), 'availability': r.values.get('availability_pct')} for table in tables for r in table.records] Retention Policies и DownsamplingХранить сырые данные с секундным разрешением 10 лет — безумно дорого. Правильная стратегия: "Горячие" данные: 1 секунда, 30 дней → быстрый SSD "Тёплые" данные: 1 минута, 1 год → обычный SSD "Холодные" данные: 1 час, 10 лет → HDD/объектное хранилище Конфигурация в InfluxDB 2.x:# Создание bucket с retention 30 дней (сырые данные) influx bucket create \ --name process_data_raw \ --retention 30d \ --org factory # Bucket для агрегированных данных (бессрочно) influx bucket create \ --name process_data_aggregated \ --retention 0 \ --org factory Задача downsampling (Flux):def setup_downsampling_task(): """ Создаём задачу InfluxDB для автоматического downsampling. Каждые 5 минут агрегируем сырые данные в минутные. """ flux_task = ''' option task = { name: "Downsampling: raw→1min", every: 5m, // Запускать каждые 5 минут offset: 1m, // Смещение (ждём пока данные придут) } // Читаем сырые данные за последние 5 минут data = from(bucket: "process_data_raw") |> range(start: -task.every) |> filter(fn: (r) => r._measurement == "telemetry") // Агрегируем каждую числовую метрику data |> filter(fn: (r) => r._field == "temperature" or r._field == "current" or r._field == "pressure") |> aggregateWindow(every: 1m, fn: mean, createEmpty: false) |> set(key: "_measurement", value: "telemetry_1m") |> to(bucket: "process_data_aggregated") // Для бинарных данных (running) — используем last data |> filter(fn: (r) => r._field == "running") |> aggregateWindow(every: 1m, fn: last, createEmpty: false) |> set(key: "_measurement", value: "telemetry_1m") |> to(bucket: "process_data_aggregated") ''' # Создание задачи через API tasks_api = client.tasks_api() task = tasks_api.create_task_every( name="Downsampling: raw→1min", flux=flux_task, every="5m", organization=INFLUX_ORG ) print(f"Задача создана: {task.id}") TimescaleDB: PostgreSQL для временных рядовTimescaleDB — расширение PostgreSQL. Если вы уже используете PostgreSQL и знаете SQL — это лучший выбор. Вы получаете TSDB-оптимизации при сохранении полного SQL. -- Установка расширения CREATE EXTENSION IF NOT EXISTS timescaledb; -- Обычная таблица PostgreSQL CREATE TABLE telemetry ( time TIMESTAMPTZ NOT NULL, device TEXT NOT NULL, location TEXT NOT NULL, temperature FLOAT, current FLOAT, pressure FLOAT, running BOOLEAN, quality TEXT DEFAULT 'GOOD' ); -- Превращаем в hypertable (TimescaleDB магия!) SELECT create_hypertable('telemetry', 'time', chunk_time_interval => INTERVAL '1 day' -- Партиция = 1 день ); -- Индекс на часто используемые теги CREATE INDEX ON telemetry (device, time DESC); CREATE INDEX ON telemetry (location, time DESC); -- Compression (сжатие старых данных) ALTER TABLE telemetry SET ( timescaledb.compress, timescaledb.compress_segmentby = 'device', timescaledb.compress_orderby = 'time DESC' ); -- Автоматическое сжатие данных старше 7 дней SELECT add_compression_policy('telemetry', INTERVAL '7 days'); -- Автоматическое удаление старых данных (30 дней) SELECT add_retention_policy('telemetry', INTERVAL '30 days'); Запросы (обычный SQL!):-- Последний час данных с устройства SELECT time, temperature, current, running FROM telemetry WHERE device = 'pump1' AND time > NOW() - INTERVAL '1 hour' ORDER BY time DESC; -- Среднее по 5-минутным окнам SELECT time_bucket('5 minutes', time) AS bucket, device, ROUND(AVG(temperature)::numeric, 2) AS avg_temp, ROUND(MIN(temperature)::numeric, 2) AS min_temp, ROUND(MAX(temperature)::numeric, 2) AS max_temp, COUNT(*) AS samples FROM telemetry WHERE device = 'pump1' AND time > NOW() - INTERVAL '24 hours' GROUP BY bucket, device ORDER BY bucket DESC; -- Обнаружение аномалий (значение > avg + 2*stddev) WITH stats AS ( SELECT device, AVG(temperature) AS avg_temp, STDDEV(temperature) AS std_temp FROM telemetry WHERE time > NOW() - INTERVAL '7 days' GROUP BY device ) SELECT t.time, t.device, t.temperature, s.avg_temp, s.std_temp, (t.temperature - s.avg_temp) / NULLIF(s.std_temp, 0) AS z_score FROM telemetry t JOIN stats s ON t.device = s.device WHERE t.time > NOW() - INTERVAL '24 hours' AND ABS((t.temperature - s.avg_temp) / NULLIF(s.std_temp, 0)) > 2.0 ORDER BY ABS((t.temperature - s.avg_temp) / NULLIF(s.std_temp, 0)) DESC LIMIT 50; -- Доступность оборудования за месяц SELECT device, COUNT(*) FILTER (WHERE running = true) AS running_count, COUNT(*) AS total_count, ROUND( COUNT(*) FILTER (WHERE running = true)::numeric / COUNT(*) * 100, 1 ) AS availability_pct, SUM(CASE WHEN running THEN 1 ELSE 0 END) * EXTRACT(EPOCH FROM INTERVAL '1 second') / 3600.0 AS running_hours FROM telemetry WHERE time > NOW() - INTERVAL '30 days' GROUP BY device ORDER BY availability_pct DESC; Непрерывные агрегации (Continuous Aggregates):-- Создаём материализованное представление с автообновлением CREATE MATERIALIZED VIEW telemetry_5min WITH (timescaledb.continuous) AS SELECT time_bucket('5 minutes', time) AS bucket, device, location, AVG(temperature) AS avg_temp, MIN(temperature) AS min_temp, MAX(temperature) AS max_temp, AVG(current) AS avg_current, MAX(current) AS max_current, BOOL_OR(running) AS any_running, COUNT(*) AS sample_count FROM telemetry GROUP BY bucket, device, location WITH NO DATA; -- Автоматическое обновление каждые 5 минут SELECT add_continuous_aggregate_policy('telemetry_5min', start_offset => INTERVAL '15 minutes', end_offset => INTERVAL '5 minutes', schedule_interval => INTERVAL '5 minutes' ); -- Запрос к агрегированным данным (мгновенно!) SELECT * FROM telemetry_5min WHERE device = 'pump1' AND bucket > NOW() - INTERVAL '24 hours' ORDER BY bucket DESC; Python + SQLAlchemy + TimescaleDB:from sqlalchemy import create_engine, text from sqlalchemy.orm import Session import pandas as pd from datetime import datetime, timedelta, timezone DATABASE_URL = "postgresql://user:password@localhost:5432/factory_db" engine = create_engine(DATABASE_URL, pool_size=10, max_overflow=20) class TelemetryRepository: def write_batch(self, records: list[dict]) -> int: """Пакетная запись телеметрии""" if not records: return 0 with engine.begin() as conn: result = conn.execute( text(""" INSERT INTO telemetry (time, device, location, temperature, current, pressure, running) VALUES (:time, :device, :location, :temperature, :current, :pressure, :running) ON CONFLICT DO NOTHING """), records ) return result.rowcount def get_latest(self, device: str, fields: list[str] = None) -> dict | None: """Последнее значение устройства""" field_list = ', '.join(fields or ['temperature', 'current', 'pressure', 'running']) with engine.connect() as conn: row = conn.execute( text(f""" SELECT time, {field_list} FROM telemetry WHERE device = :device ORDER BY time DESC LIMIT 1 """), {'device': device} ).fetchone() return dict(row._mapping) if row else None def get_as_dataframe(self, device: str, hours: int = 24) -> pd.DataFrame: """Загрузка данных в Pandas DataFrame для анализа""" query = text(""" SELECT time, temperature, current, pressure, running FROM telemetry WHERE device = :device AND time > :since ORDER BY time """) with engine.connect() as conn: df = pd.read_sql( query, conn, params={'device': device, 'since': datetime.now(timezone.utc) - timedelta(hours=hours)}, parse_dates=['time'], index_col='time' ) return df def detect_anomalies_zscore(self, device: str, field: str = 'temperature', threshold: float = 2.5) -> pd.DataFrame: """Обнаружение аномалий методом z-score""" df = self.get_as_dataframe(device, hours=24) if df.empty or field not in df.columns: return pd.DataFrame() mean = df[field].mean() std = df[field].std() if std == 0: return pd.DataFrame() df['z_score'] = (df[field] - mean) / std anomalies = df[df['z_score'].abs() > threshold].copy() anomalies['is_high'] = anomalies['z_score'] > 0 return anomalies[['z_score', field, 'is_high']] def get_equipment_report(self, days: int = 30) -> pd.DataFrame: """Отчёт по оборудованию за период""" query = text(""" SELECT device, COUNT(*) as total_records, COUNT(*) FILTER (WHERE running) as running_records, ROUND((COUNT(*) FILTER (WHERE running)::numeric / COUNT(*) * 100)::numeric, 1) as availability_pct, ROUND(AVG(temperature)::numeric, 1) as avg_temp, ROUND(MAX(temperature)::numeric, 1) as max_temp, ROUND(AVG(current)::numeric, 2) as avg_current FROM telemetry WHERE time > NOW() - MAKE_INTERVAL(days => :days) GROUP BY device ORDER BY device """) with engine.connect() as conn: return pd.read_sql(query, conn, params={'days': days}) Выбор TSDB: сравнительная таблицаКритерий InfluxDB 2.x TimescaleDB Prometheus Основа Собственный движок PostgreSQL Собственный Язык запросов Flux (мощный, непривычный) SQL PromQL Производительность записи ★★★★★ ★★★★ ★★★ SQL-совместимость ❌ ✅ (полная) ❌ Сжатие ★★★★★ ★★★★ ★★★ Масштабирование InfluxDB Enterprise TimescaleDB Thanos/Cortex Лицензия BSL (OSS ограничен) Apache 2 Apache 2 Интеграция с Grafana ★★★★★ ★★★★★ ★★★★★ Лучше для IoT, большой объём тегов Существующий PostgreSQL-стек DevOps мониторинг ЗаключениеВыбор TSDB зависит от контекста. InfluxDB — лучший выбор для чистых IoT/телеметрия проектов: максимальная производительность, мощный Flux для временны́х вычислений, отличная экосистема. TimescaleDB — если уже есть PostgreSQL инфраструктура, нужны JOINs с другими данными или разработчики лучше знают SQL. Ключевые принципы для production: всегда настраивайте retention policies (данные должны автоматически удаляться), используйте downsampling для долгосрочного хранения агрегатов, настройте сжатие (экономия 90%+ дискового пространства), мониторьте производительность самой TSDB. Deadband-фильтрация на уровне edge-узла (не писать если значение не изменилось существенно) снижает нагрузку на БД в 5–50 раз для медленно меняющихся процессов. Это первое что нужно сделать перед любой оптимизацией TSDB. -
 Git: это не просто "сохранить файл"Git изобрёл Линус Торвальдс в 2005 году за две недели — потому что существующие системы контроля версий его раздражали. Результат стал стандартом де-факто для всей современной разработки. Но большинство разработчиков используют только 10% возможностей Git: git add, git commit, git push. И потом удивляются, почему в команде хаос, история проекта нечитаема, а деплой — это страшный ритуал. Правильное использование Git — это не набор команд, это культура разработки. Сегодня разберём, как устроена эта культура в реальных командах. Анатомия правильного коммитаКоммит — это единица изменений. Плохой коммит: "исправил баги и добавил фичи". Хороший коммит: одно логическое изменение, понятное описание. Conventional Commits — стандарт сообщений<type>(<scope>): <description> [optional body] [optional footer(s)] Типы: feat — новая функциональность fix — исправление бага docs — только документация style — форматирование, точки с запятой (нет изменений логики) refactor — рефакторинг (нет новой функциональности, нет фикса) perf — оптимизация производительности test — добавление тестов chore — обслуживание: обновление зависимостей, конфигурации CI ci — изменения CI/CD конфигурации revert — откат предыдущего коммита Примеры: # Плохо: git commit -m "fix" git commit -m "wip" git commit -m "changes" git commit -m "поправил немного" # Хорошо: git commit -m "fix(auth): исправлена утечка токена при logout" git commit -m "feat(modbus): добавлена поддержка FC15 (write multiple coils)" git commit -m "perf(historian): оптимизирован batch-insert, +340% throughput" git commit -m "docs(api): добавлены примеры для /api/v1/devices endpoint" # С телом для сложных изменений: git commit -m "fix(plc): исправлено переполнение счётчика при rollover Счётчик типа UINT использовался для значений >65535. Изменён на DINT (32-бит). Затронутые устройства: все узлы с FC03. Closes #247" Почему это важно?Автоматический CHANGELOG — инструменты как conventional-changelog генерируют его автоматически Семантическое версионирование — feat → minor, fix → patch, feat! или BREAKING CHANGE → major Читаемая история — через год понятно что и зачем было сделано Быстрый поиск — git log --grep="fix(modbus)" найдёт все фиксы Modbus Стратегии ветвленияGit Flow — классика для релизного циклаmain ────────────────────────────────────── (production-ready, теги версий) \ / release/1.2.0 ─────────────────────────── (только bagfixes перед релизом) \ / develop ──────────────────────────────── (интеграция фич) \ \ / feat/A feat/B feat/C Ветки: main — всегда стабильный, деплоится в прод, только через merge из release/* develop — основная ветка разработки, всегда должна собираться feature/* — новые фичи, создаются из develop, мержатся в develop release/* — подготовка релиза (версия, changelog), только bugfix hotfix/* — срочные фиксы прод, мержатся в main И develop # Создать фичу: git checkout develop git checkout -b feature/modbus-fc15-support # Завершить фичу: git checkout develop git merge --no-ff feature/modbus-fc15-support # --no-ff сохраняет историю git branch -d feature/modbus-fc15-support # Подготовить релиз: git checkout develop git checkout -b release/1.2.0 # Обновить версию, CHANGELOG... git commit -m "chore(release): version 1.2.0" git checkout main git merge --no-ff release/1.2.0 git tag -a v1.2.0 -m "Release 1.2.0" git checkout develop git merge --no-ff release/1.2.0 Trunk-Based Development — для быстрых командВсе разработчики работают в одной ветке (main), фичи прячутся за feature-флагами. Деплой несколько раз в день. Подходит для опытных команд с хорошим покрытием тестами. # Только короткоживущие ветки (1-2 дня максимум) git checkout -b task/PLC-247-fix-counter-overflow # ... работа ... git push origin task/PLC-247-fix-counter-overflow # Pull Request → Review → Merge в main # Деплой автоматически GitHub Flow — для непрерывного деплояУпрощённый Git Flow без develop: main = то, что в проде Feature branches — от main, в main через PR Деплой = merge в main Code Review: как делать правильноCode review — не поиск ошибок, это обмен знаниями и повышение качества. Хороший review делает команду сильнее. Для автора PR:## Описание Добавлена поддержка записи нескольких coils (FC15) в Modbus slave. ## Мотивация Клиент запросил управление 16 выходными реле через один Modbus-запрос вместо 16 отдельных FC05. Уменьшает нагрузку на шину в 16 раз. ## Изменения - `ModbusSlave::handle_fc15()` — новый обработчик функционального кода 15 - Обновлён маппинг coils на GPIO пины - Добавлены unit-тесты: 8 тест-кейсов ## Тестирование - [x] Unit-тесты: все зелёные - [x] Интеграционный тест с реальным Modbus-мастером (Python pymodbus) - [x] Проверен на железе: Raspberry Pi + MCP2551 ## Breaking Changes Нет. FC05 продолжает работать. ## Связанные Issues Closes #247 Для ревьюера:Проверяйте: Логику — правильно ли реализовано то, что задумано? Граничные случаи — что при пустых данных? При переполнении? При сетевой ошибке? Безопасность — нет ли SQL-инъекций, XSS, незащищённых данных? Производительность — нет ли N+1 запросов, бесконечных циклов? Тесты — покрывают ли они описанную функциональность? Документацию — понятно ли из кода и комментариев что происходит? Не проверяйте: Стиль форматирования (для этого есть линтеры и форматтеры) Личные предпочтения (если оба подхода корректны) Тон комментариев: ❌ Это неправильно, так делать нельзя ✅ Здесь возможно переполнение при dlc > 8, как насчёт проверки? ❌ Почему ты использовал цикл вместо map()? ✅ Можно ли тут использовать list comprehension для читаемости? ❌ Нет, переделай. ✅ Мне кажется, паттерн Strategy тут подошёл бы лучше — как думаешь? GitHub Actions: автоматизация всего# .github/workflows/ci.yml name: CI/CD Pipeline on: push: branches: [ main, develop ] pull_request: branches: [ main, develop ] jobs: # ===== ЛИНТИНГ И СТАТИЧЕСКИЙ АНАЛИЗ ===== lint: name: Lint & Static Analysis runs-on: ubuntu-latest steps: - uses: actions/checkout@v4 - name: Set up Python uses: actions/setup-python@v4 with: python-version: '3.11' cache: 'pip' - name: Install dependencies run: | pip install flake8 pylint mypy black isort pip install -r requirements.txt - name: Check formatting (black) run: black --check --diff . - name: Check imports (isort) run: isort --check-only --diff . - name: Lint (flake8) run: flake8 . --max-line-length=100 --exclude=.venv,migrations - name: Type check (mypy) run: mypy src/ --strict --ignore-missing-imports # ===== ТЕСТИРОВАНИЕ ===== test: name: Unit & Integration Tests runs-on: ubuntu-latest needs: lint services: # Поднимаем сервисы для интеграционных тестов redis: image: redis:7 ports: ['6379:6379'] mosquitto: image: eclipse-mosquitto:2 ports: ['1883:1883'] strategy: matrix: python-version: ['3.10', '3.11', '3.12'] # Тестируем на всех версиях steps: - uses: actions/checkout@v4 - name: Set up Python ${{ matrix.python-version }} uses: actions/setup-python@v4 with: python-version: ${{ matrix.python-version }} cache: 'pip' - name: Install dependencies run: pip install -r requirements.txt -r requirements-dev.txt - name: Run tests with coverage run: | pytest tests/ \ --cov=src \ --cov-report=xml \ --cov-report=term-missing \ --cov-fail-under=80 \ -v env: REDIS_URL: redis://localhost:6379 MQTT_HOST: localhost - name: Upload coverage to Codecov uses: codecov/codecov-action@v3 with: file: ./coverage.xml # ===== СБОРКА DOCKER ОБРАЗА ===== build: name: Build & Push Docker Image runs-on: ubuntu-latest needs: test if: github.ref == 'refs/heads/main' || startsWith(github.ref, 'refs/tags/') steps: - uses: actions/checkout@v4 - name: Set up Docker Buildx uses: docker/setup-buildx-action@v3 - name: Login to Registry uses: docker/login-action@v3 with: registry: ghcr.io username: ${{ github.actor }} password: ${{ secrets.GITHUB_TOKEN }} - name: Extract metadata id: meta uses: docker/metadata-action@v5 with: images: ghcr.io/${{ github.repository }} tags: | type=ref,event=branch type=semver,pattern={{version}} type=semver,pattern={{major}}.{{minor}} type=sha,prefix=sha- - name: Build and push uses: docker/build-push-action@v5 with: context: . platforms: linux/amd64,linux/arm64 # Для x86 серверов И Raspberry Pi push: true tags: ${{ steps.meta.outputs.tags }} cache-from: type=gha cache-to: type=gha,mode=max # ===== ДЕПЛОЙ ===== deploy-staging: name: Deploy to Staging runs-on: ubuntu-latest needs: build if: github.ref == 'refs/heads/develop' environment: staging steps: - name: Deploy via SSH uses: appleboy/ssh-action@v1 with: host: ${{ secrets.STAGING_HOST }} username: deploy key: ${{ secrets.STAGING_SSH_KEY }} script: | cd /opt/gateway docker compose pull docker compose up -d --remove-orphans docker compose ps deploy-production: name: Deploy to Production runs-on: ubuntu-latest needs: build if: startsWith(github.ref, 'refs/tags/v') environment: production # Требует одобрения в GitHub steps: - name: Deploy to production uses: appleboy/ssh-action@v1 with: host: ${{ secrets.PROD_HOST }} username: deploy key: ${{ secrets.PROD_SSH_KEY }} script: | cd /opt/gateway export IMAGE_TAG=${{ github.ref_name }} docker compose pull docker compose up -d --remove-orphans # Smoke test sleep 10 curl -f http://localhost:8080/health || (docker compose logs && exit 1) Git Hooks: автоматизация на уровне репозитория# .git/hooks/pre-commit (запускается перед каждым коммитом) #!/bin/bash set -e echo "🔍 Pre-commit проверки..." # Форматирование Python if command -v black &> /dev/null; then black --check . --quiet if [ $? -ne 0 ]; then echo "❌ Форматирование не соответствует black. Запустите: black ." exit 1 fi fi # Быстрые тесты (только изменённые файлы) CHANGED_PY=$(git diff --cached --name-only --diff-filter=ACM | grep '\.py$') if [ -n "$CHANGED_PY" ]; then pytest tests/unit/ -x -q --tb=short fi echo "✅ Все проверки прошли" Лучше использовать pre-commit framework:# .pre-commit-config.yaml repos: - repo: https://github.com/pre-commit/pre-commit-hooks rev: v4.5.0 hooks: - id: trailing-whitespace - id: end-of-file-fixer - id: check-yaml - id: check-json - id: check-merge-conflict - id: detect-private-key # Не допускаем секреты в коде! - repo: https://github.com/psf/black rev: 23.10.1 hooks: - id: black - repo: https://github.com/pycqa/isort rev: 5.12.0 hooks: - id: isort - repo: https://github.com/commitizen-tools/commitizen rev: v3.12.0 hooks: - id: commitizen # Проверяет формат сообщения коммита # Установка: pip install pre-commit pre-commit install # Устанавливает хуки в .git/hooks/ pre-commit run --all-files # Запуск вручную Семантическое версионирование и автоматический релизSemantic Versioning: MAJOR.MINOR.PATCHPATCH (1.2.3 → 1.2.4): багфиксы, обратно совместимые изменения MINOR (1.2.4 → 1.3.0): новая функциональность, обратно совместимая MAJOR (1.3.0 → 2.0.0): несовместимые изменения API Автоматический выпуск с commitizen:# pyproject.toml: [tool.commitizen] name = "cz_conventional_commits" tag_format = "v$version" version_scheme = "semver" version_files = [ "src/__init__.py:__version__", "pyproject.toml:version" ] update_changelog_on_bump = true # Команды: cz bump # Автоматически определяет тип bumpa из коммитов cz bump --major # Принудительно major cz changelog # Генерирует CHANGELOG.md Автоматический CHANGELOG.md из conventional commits: ## v1.3.0 (2024-03-15) ### Features - **modbus**: добавлена поддержка FC15 (write multiple coils) (#247) - **historian**: реализован deadband-алгоритм сжатия, экономия 78% места ### Bug Fixes - **uart**: исправлена потеря байт при высоких нагрузках (#251) - **pid**: устранено интегральное насыщение при длительной работе ### Performance - **batch-write**: оптимизирован bulk insert в InfluxDB, +340% throughput Практические советы.gitignore — не игнорируйте важное# Python __pycache__/ *.pyc *.pyo .venv/ .env venv/ # IDE .idea/ .vscode/ *.swp *.swo # Сборка dist/ build/ *.egg-info/ # Тесты .coverage htmlcov/ .pytest_cache/ # Секреты (НИКОГДА не коммитить!) *.key *.pem .env.local config.secret.yaml # OS .DS_Store Thumbs.db Работа с секретами — никогда в репозиторий!# Плохо: секреты в коде MQTT_PASSWORD = "supersecret123" # Хорошо: из переменных окружения MQTT_PASSWORD = os.getenv("MQTT_PASSWORD") # В .env локально, в CI — secrets # Для локальной разработки: .env файл (в .gitignore!) # pip install python-dotenv from dotenv import load_dotenv load_dotenv() # Для проверки что секрет не утёк: git log --all --full-history -- "*.env" # Поиск в истории git grep "supersecret" # Поиск в текущем состоянии Интерактивный rebase для чистой истории# Перед мержем PR привести историю в порядок git rebase -i origin/main # Редактор покажет: # pick a1b2c3 WIP fix something # pick d4e5f6 another fix # pick g7h8i9 добавил логирование # Меняем на: # reword a1b2c3 fix(modbus): исправлен CRC при DLC=0 # squash d4e5f6 # Объединить с предыдущим # pick g7h8i9 feat(logging): добавлено структурированное логирование # Результат: чистая, осмысленная история ЗаключениеGit — это не инструмент, это язык коммуникации в команде. Правильные коммиты рассказывают историю проекта. Грамотное ветвление изолирует работу. CI/CD устраняет ручной труд и человеческие ошибки при деплое. Начните с малого: установите .pre-commit-config.yaml с black и detect-private-key. Перейдите на conventional commits. Добавьте один GitHub Actions workflow с тестами. Каждый из этих шагов принесёт немедленную пользу. Инвестиция в культуру работы с кодом возвращается многократно: меньше времени на дебаггинг, меньше страха перед деплоем, больше времени на реальную разработку.
Git: это не просто "сохранить файл"Git изобрёл Линус Торвальдс в 2005 году за две недели — потому что существующие системы контроля версий его раздражали. Результат стал стандартом де-факто для всей современной разработки. Но большинство разработчиков используют только 10% возможностей Git: git add, git commit, git push. И потом удивляются, почему в команде хаос, история проекта нечитаема, а деплой — это страшный ритуал. Правильное использование Git — это не набор команд, это культура разработки. Сегодня разберём, как устроена эта культура в реальных командах. Анатомия правильного коммитаКоммит — это единица изменений. Плохой коммит: "исправил баги и добавил фичи". Хороший коммит: одно логическое изменение, понятное описание. Conventional Commits — стандарт сообщений<type>(<scope>): <description> [optional body] [optional footer(s)] Типы: feat — новая функциональность fix — исправление бага docs — только документация style — форматирование, точки с запятой (нет изменений логики) refactor — рефакторинг (нет новой функциональности, нет фикса) perf — оптимизация производительности test — добавление тестов chore — обслуживание: обновление зависимостей, конфигурации CI ci — изменения CI/CD конфигурации revert — откат предыдущего коммита Примеры: # Плохо: git commit -m "fix" git commit -m "wip" git commit -m "changes" git commit -m "поправил немного" # Хорошо: git commit -m "fix(auth): исправлена утечка токена при logout" git commit -m "feat(modbus): добавлена поддержка FC15 (write multiple coils)" git commit -m "perf(historian): оптимизирован batch-insert, +340% throughput" git commit -m "docs(api): добавлены примеры для /api/v1/devices endpoint" # С телом для сложных изменений: git commit -m "fix(plc): исправлено переполнение счётчика при rollover Счётчик типа UINT использовался для значений >65535. Изменён на DINT (32-бит). Затронутые устройства: все узлы с FC03. Closes #247" Почему это важно?Автоматический CHANGELOG — инструменты как conventional-changelog генерируют его автоматически Семантическое версионирование — feat → minor, fix → patch, feat! или BREAKING CHANGE → major Читаемая история — через год понятно что и зачем было сделано Быстрый поиск — git log --grep="fix(modbus)" найдёт все фиксы Modbus Стратегии ветвленияGit Flow — классика для релизного циклаmain ────────────────────────────────────── (production-ready, теги версий) \ / release/1.2.0 ─────────────────────────── (только bagfixes перед релизом) \ / develop ──────────────────────────────── (интеграция фич) \ \ / feat/A feat/B feat/C Ветки: main — всегда стабильный, деплоится в прод, только через merge из release/* develop — основная ветка разработки, всегда должна собираться feature/* — новые фичи, создаются из develop, мержатся в develop release/* — подготовка релиза (версия, changelog), только bugfix hotfix/* — срочные фиксы прод, мержатся в main И develop # Создать фичу: git checkout develop git checkout -b feature/modbus-fc15-support # Завершить фичу: git checkout develop git merge --no-ff feature/modbus-fc15-support # --no-ff сохраняет историю git branch -d feature/modbus-fc15-support # Подготовить релиз: git checkout develop git checkout -b release/1.2.0 # Обновить версию, CHANGELOG... git commit -m "chore(release): version 1.2.0" git checkout main git merge --no-ff release/1.2.0 git tag -a v1.2.0 -m "Release 1.2.0" git checkout develop git merge --no-ff release/1.2.0 Trunk-Based Development — для быстрых командВсе разработчики работают в одной ветке (main), фичи прячутся за feature-флагами. Деплой несколько раз в день. Подходит для опытных команд с хорошим покрытием тестами. # Только короткоживущие ветки (1-2 дня максимум) git checkout -b task/PLC-247-fix-counter-overflow # ... работа ... git push origin task/PLC-247-fix-counter-overflow # Pull Request → Review → Merge в main # Деплой автоматически GitHub Flow — для непрерывного деплояУпрощённый Git Flow без develop: main = то, что в проде Feature branches — от main, в main через PR Деплой = merge в main Code Review: как делать правильноCode review — не поиск ошибок, это обмен знаниями и повышение качества. Хороший review делает команду сильнее. Для автора PR:## Описание Добавлена поддержка записи нескольких coils (FC15) в Modbus slave. ## Мотивация Клиент запросил управление 16 выходными реле через один Modbus-запрос вместо 16 отдельных FC05. Уменьшает нагрузку на шину в 16 раз. ## Изменения - `ModbusSlave::handle_fc15()` — новый обработчик функционального кода 15 - Обновлён маппинг coils на GPIO пины - Добавлены unit-тесты: 8 тест-кейсов ## Тестирование - [x] Unit-тесты: все зелёные - [x] Интеграционный тест с реальным Modbus-мастером (Python pymodbus) - [x] Проверен на железе: Raspberry Pi + MCP2551 ## Breaking Changes Нет. FC05 продолжает работать. ## Связанные Issues Closes #247 Для ревьюера:Проверяйте: Логику — правильно ли реализовано то, что задумано? Граничные случаи — что при пустых данных? При переполнении? При сетевой ошибке? Безопасность — нет ли SQL-инъекций, XSS, незащищённых данных? Производительность — нет ли N+1 запросов, бесконечных циклов? Тесты — покрывают ли они описанную функциональность? Документацию — понятно ли из кода и комментариев что происходит? Не проверяйте: Стиль форматирования (для этого есть линтеры и форматтеры) Личные предпочтения (если оба подхода корректны) Тон комментариев: ❌ Это неправильно, так делать нельзя ✅ Здесь возможно переполнение при dlc > 8, как насчёт проверки? ❌ Почему ты использовал цикл вместо map()? ✅ Можно ли тут использовать list comprehension для читаемости? ❌ Нет, переделай. ✅ Мне кажется, паттерн Strategy тут подошёл бы лучше — как думаешь? GitHub Actions: автоматизация всего# .github/workflows/ci.yml name: CI/CD Pipeline on: push: branches: [ main, develop ] pull_request: branches: [ main, develop ] jobs: # ===== ЛИНТИНГ И СТАТИЧЕСКИЙ АНАЛИЗ ===== lint: name: Lint & Static Analysis runs-on: ubuntu-latest steps: - uses: actions/checkout@v4 - name: Set up Python uses: actions/setup-python@v4 with: python-version: '3.11' cache: 'pip' - name: Install dependencies run: | pip install flake8 pylint mypy black isort pip install -r requirements.txt - name: Check formatting (black) run: black --check --diff . - name: Check imports (isort) run: isort --check-only --diff . - name: Lint (flake8) run: flake8 . --max-line-length=100 --exclude=.venv,migrations - name: Type check (mypy) run: mypy src/ --strict --ignore-missing-imports # ===== ТЕСТИРОВАНИЕ ===== test: name: Unit & Integration Tests runs-on: ubuntu-latest needs: lint services: # Поднимаем сервисы для интеграционных тестов redis: image: redis:7 ports: ['6379:6379'] mosquitto: image: eclipse-mosquitto:2 ports: ['1883:1883'] strategy: matrix: python-version: ['3.10', '3.11', '3.12'] # Тестируем на всех версиях steps: - uses: actions/checkout@v4 - name: Set up Python ${{ matrix.python-version }} uses: actions/setup-python@v4 with: python-version: ${{ matrix.python-version }} cache: 'pip' - name: Install dependencies run: pip install -r requirements.txt -r requirements-dev.txt - name: Run tests with coverage run: | pytest tests/ \ --cov=src \ --cov-report=xml \ --cov-report=term-missing \ --cov-fail-under=80 \ -v env: REDIS_URL: redis://localhost:6379 MQTT_HOST: localhost - name: Upload coverage to Codecov uses: codecov/codecov-action@v3 with: file: ./coverage.xml # ===== СБОРКА DOCKER ОБРАЗА ===== build: name: Build & Push Docker Image runs-on: ubuntu-latest needs: test if: github.ref == 'refs/heads/main' || startsWith(github.ref, 'refs/tags/') steps: - uses: actions/checkout@v4 - name: Set up Docker Buildx uses: docker/setup-buildx-action@v3 - name: Login to Registry uses: docker/login-action@v3 with: registry: ghcr.io username: ${{ github.actor }} password: ${{ secrets.GITHUB_TOKEN }} - name: Extract metadata id: meta uses: docker/metadata-action@v5 with: images: ghcr.io/${{ github.repository }} tags: | type=ref,event=branch type=semver,pattern={{version}} type=semver,pattern={{major}}.{{minor}} type=sha,prefix=sha- - name: Build and push uses: docker/build-push-action@v5 with: context: . platforms: linux/amd64,linux/arm64 # Для x86 серверов И Raspberry Pi push: true tags: ${{ steps.meta.outputs.tags }} cache-from: type=gha cache-to: type=gha,mode=max # ===== ДЕПЛОЙ ===== deploy-staging: name: Deploy to Staging runs-on: ubuntu-latest needs: build if: github.ref == 'refs/heads/develop' environment: staging steps: - name: Deploy via SSH uses: appleboy/ssh-action@v1 with: host: ${{ secrets.STAGING_HOST }} username: deploy key: ${{ secrets.STAGING_SSH_KEY }} script: | cd /opt/gateway docker compose pull docker compose up -d --remove-orphans docker compose ps deploy-production: name: Deploy to Production runs-on: ubuntu-latest needs: build if: startsWith(github.ref, 'refs/tags/v') environment: production # Требует одобрения в GitHub steps: - name: Deploy to production uses: appleboy/ssh-action@v1 with: host: ${{ secrets.PROD_HOST }} username: deploy key: ${{ secrets.PROD_SSH_KEY }} script: | cd /opt/gateway export IMAGE_TAG=${{ github.ref_name }} docker compose pull docker compose up -d --remove-orphans # Smoke test sleep 10 curl -f http://localhost:8080/health || (docker compose logs && exit 1) Git Hooks: автоматизация на уровне репозитория# .git/hooks/pre-commit (запускается перед каждым коммитом) #!/bin/bash set -e echo "🔍 Pre-commit проверки..." # Форматирование Python if command -v black &> /dev/null; then black --check . --quiet if [ $? -ne 0 ]; then echo "❌ Форматирование не соответствует black. Запустите: black ." exit 1 fi fi # Быстрые тесты (только изменённые файлы) CHANGED_PY=$(git diff --cached --name-only --diff-filter=ACM | grep '\.py$') if [ -n "$CHANGED_PY" ]; then pytest tests/unit/ -x -q --tb=short fi echo "✅ Все проверки прошли" Лучше использовать pre-commit framework:# .pre-commit-config.yaml repos: - repo: https://github.com/pre-commit/pre-commit-hooks rev: v4.5.0 hooks: - id: trailing-whitespace - id: end-of-file-fixer - id: check-yaml - id: check-json - id: check-merge-conflict - id: detect-private-key # Не допускаем секреты в коде! - repo: https://github.com/psf/black rev: 23.10.1 hooks: - id: black - repo: https://github.com/pycqa/isort rev: 5.12.0 hooks: - id: isort - repo: https://github.com/commitizen-tools/commitizen rev: v3.12.0 hooks: - id: commitizen # Проверяет формат сообщения коммита # Установка: pip install pre-commit pre-commit install # Устанавливает хуки в .git/hooks/ pre-commit run --all-files # Запуск вручную Семантическое версионирование и автоматический релизSemantic Versioning: MAJOR.MINOR.PATCHPATCH (1.2.3 → 1.2.4): багфиксы, обратно совместимые изменения MINOR (1.2.4 → 1.3.0): новая функциональность, обратно совместимая MAJOR (1.3.0 → 2.0.0): несовместимые изменения API Автоматический выпуск с commitizen:# pyproject.toml: [tool.commitizen] name = "cz_conventional_commits" tag_format = "v$version" version_scheme = "semver" version_files = [ "src/__init__.py:__version__", "pyproject.toml:version" ] update_changelog_on_bump = true # Команды: cz bump # Автоматически определяет тип bumpa из коммитов cz bump --major # Принудительно major cz changelog # Генерирует CHANGELOG.md Автоматический CHANGELOG.md из conventional commits: ## v1.3.0 (2024-03-15) ### Features - **modbus**: добавлена поддержка FC15 (write multiple coils) (#247) - **historian**: реализован deadband-алгоритм сжатия, экономия 78% места ### Bug Fixes - **uart**: исправлена потеря байт при высоких нагрузках (#251) - **pid**: устранено интегральное насыщение при длительной работе ### Performance - **batch-write**: оптимизирован bulk insert в InfluxDB, +340% throughput Практические советы.gitignore — не игнорируйте важное# Python __pycache__/ *.pyc *.pyo .venv/ .env venv/ # IDE .idea/ .vscode/ *.swp *.swo # Сборка dist/ build/ *.egg-info/ # Тесты .coverage htmlcov/ .pytest_cache/ # Секреты (НИКОГДА не коммитить!) *.key *.pem .env.local config.secret.yaml # OS .DS_Store Thumbs.db Работа с секретами — никогда в репозиторий!# Плохо: секреты в коде MQTT_PASSWORD = "supersecret123" # Хорошо: из переменных окружения MQTT_PASSWORD = os.getenv("MQTT_PASSWORD") # В .env локально, в CI — secrets # Для локальной разработки: .env файл (в .gitignore!) # pip install python-dotenv from dotenv import load_dotenv load_dotenv() # Для проверки что секрет не утёк: git log --all --full-history -- "*.env" # Поиск в истории git grep "supersecret" # Поиск в текущем состоянии Интерактивный rebase для чистой истории# Перед мержем PR привести историю в порядок git rebase -i origin/main # Редактор покажет: # pick a1b2c3 WIP fix something # pick d4e5f6 another fix # pick g7h8i9 добавил логирование # Меняем на: # reword a1b2c3 fix(modbus): исправлен CRC при DLC=0 # squash d4e5f6 # Объединить с предыдущим # pick g7h8i9 feat(logging): добавлено структурированное логирование # Результат: чистая, осмысленная история ЗаключениеGit — это не инструмент, это язык коммуникации в команде. Правильные коммиты рассказывают историю проекта. Грамотное ветвление изолирует работу. CI/CD устраняет ручной труд и человеческие ошибки при деплое. Начните с малого: установите .pre-commit-config.yaml с black и detect-private-key. Перейдите на conventional commits. Добавьте один GitHub Actions workflow с тестами. Каждый из этих шагов принесёт немедленную пользу. Инвестиция в культуру работы с кодом возвращается многократно: меньше времени на дебаггинг, меньше страха перед деплоем, больше времени на реальную разработку. -
 Когда Linux вместо микроконтроллераВыбор между голым МК (Arduino/STM32) и Linux-системой (Raspberry Pi/промышленный ПК) — одно из ключевых архитектурных решений. Linux выигрывает когда нужно: Сложные сетевые протоколы (TCP/IP стек, TLS, MQTT, OPC UA) Работа с файлами: логирование, конфигурация, обновления ПО Высокоуровневые вычисления: Python/NumPy, ML-инференс Несколько параллельных задач с разной логикой Веб-интерфейс или REST API Большой объём RAM/Flash (база данных, historian) Микроконтроллер выигрывает когда нужно: Детерминированное реальное время (< 1 мс) Мгновенный старт (Linux загружается 10–30 секунд) Минимальное энергопотребление Дешёвое серийное производство Золотое правило: Linux для "мозга" и коммуникаций, микроконтроллер для "мышц" и реального времени. Оба — в одной системе, связанные UART или SPI. Raspberry Pi в промышленности: что учестьRaspberry Pi не проектировался для промышленного применения, но активно используется. Ключевые ограничения и решения: Ограничение 1: SD-карта умирает SD-карты не рассчитаны на постоянную запись. В промышленном применении — выход из строя за 3–12 месяцев. Решения: # 1. Read-only файловая система (overlayfs) # В /boot/cmdline.txt добавить: overlayroot=tmpfs # Данные писать только на специальный раздел с journaling # 2. Переместить tmpfs для логов в RAM # /etc/fstab: tmpfs /tmp tmpfs defaults,noatime,size=100m 0 0 tmpfs /var/log tmpfs defaults,noatime,size=50m 0 0 tmpfs /var/tmp tmpfs defaults,noatime,size=20m 0 0 # 3. Использовать SSD через USB3 или eMMC-модуль (CM4) Ограничение 2: Нет RTC (часов реального времени) При потере питания время сбивается. # Установить модуль DS3231 через I2C # /boot/config.txt: dtoverlay=i2c-rtc,ds3231 # Синхронизация при загрузке: sudo hwclock --hctosys # Hardware clock → System clock Ограничение 3: Нет аппаратного watchdog "из коробки" # Включить встроенный watchdog BCM2835 # /boot/config.txt: dtparam=watchdog=on # /etc/systemd/system.conf: RuntimeWatchdogSec=10 # Сброс если systemd не пингует 10 секунд RebootWatchdogSec=60 # Проверка: ls /dev/watchdog # Должен существовать GPIO: управление пинами из userspacesysfs (устаревший, но всё ещё работает):# Экспортируем GPIO 17 echo "17" > /sys/class/gpio/export # Устанавливаем направление echo "out" > /sys/class/gpio/gpio17/direction # Устанавливаем значение echo "1" > /sys/class/gpio/gpio17/value # Читаем состояние входа cat /sys/class/gpio/gpio18/value libgpiod (современный стандарт):# Установка sudo apt install gpiod libgpiod-dev # Командная строка gpioget gpiochip0 17 # Прочитать GPIO 17 gpioset gpiochip0 17=1 # Установить в HIGH gpioset gpiochip0 17=0 18=1 # Установить несколько gpioinfo gpiochip0 # Информация о всех пинах # Python + gpiod # pip install gpiod import gpiod import time # Открываем чип chip = gpiod.Chip('gpiochip0') # Настраиваем пины led_line = chip.get_line(17) button_line = chip.get_line(18) led_config = gpiod.LineRequest() led_config.consumer = "myapp" led_config.request_type = gpiod.LineRequest.DIRECTION_OUTPUT led_line.request(led_config) btn_config = gpiod.LineRequest() btn_config.consumer = "myapp" btn_config.request_type = gpiod.LineRequest.EVENT_BOTH_EDGES # Прерывания! button_line.request(btn_config) try: while True: # Ожидание события с таймаутом 100 мс event_happened = button_line.event_wait(nsec=100_000_000) if event_happened: event = button_line.event_read() if event.type == gpiod.LineEvent.RISING_EDGE: print("Кнопка нажата") led_line.set_value(1) else: print("Кнопка отпущена") led_line.set_value(0) finally: led_line.release() button_line.release() SPI и I2C из userspaceI2C (smbus2):# pip install smbus2 import smbus2 import time class BME280_Linux: """Работа с датчиком BME280 через Linux I2C""" ADDR = 0x76 REG_ID = 0xD0 REG_CTRL = 0xF4 REG_DATA = 0xF7 def __init__(self, bus_num: int = 1): self.bus = smbus2.SMBus(bus_num) def read_reg(self, reg: int) -> int: return self.bus.read_byte_data(self.ADDR, reg) def write_reg(self, reg: int, value: int): self.bus.write_byte_data(self.ADDR, reg, value) def read_burst(self, reg: int, length: int) -> bytes: return bytes(self.bus.read_i2c_block_data(self.ADDR, reg, length)) def init(self): chip_id = self.read_reg(self.REG_ID) if chip_id != 0x60: raise RuntimeError(f"BME280 не найден, ID={chip_id:#x}") # Нормальный режим, oversampling ×4 self.write_reg(0xF4, 0x97) # ctrl_meas self.write_reg(0xF5, 0xA0) # config: IIR filter 16 time.sleep(0.1) def read(self) -> dict: data = self.read_burst(self.REG_DATA, 6) raw_press = (data[0] << 12) | (data[1] << 4) | (data[2] >> 4) raw_temp = (data[3] << 12) | (data[4] << 4) | (data[5] >> 4) # Упрощённое преобразование (без компенсации) # В реальности нужно читать калибровочные коэффициенты! temp = raw_temp / 5120.0 pressure = raw_press / 25600.0 / 100.0 # гПа return {'temperature': round(temp, 1), 'pressure': round(pressure, 1)} # Использование: sensor = BME280_Linux(bus_num=1) # /dev/i2c-1 sensor.init() while True: data = sensor.read() print(f"T={data['temperature']}°C, P={data['pressure']}гПа") time.sleep(1) SPI (spidev):import spidev import time class MCP3208_ADC: """12-битный АЦП MCP3208 через SPI""" CHANNELS = 8 def __init__(self, bus: int = 0, device: int = 0, speed_hz: int = 1_000_000): self.spi = spidev.SpiDev() self.spi.open(bus, device) # /dev/spidev0.0 self.spi.max_speed_hz = speed_hz self.spi.mode = 0 def read_channel(self, channel: int) -> int: """Чтение канала 0-7, возвращает 0-4095""" if not 0 <= channel < self.CHANNELS: raise ValueError(f"Канал {channel} вне диапазона 0-7") # MCP3208: 3 байта транзакции # Байт 1: старт-бит + single/diff + D2 # Байт 2: D1, D0, X, X, X, X, X, X # Байт 3: X, X, X, X, X, X, X, X cmd = [0x06 | (channel >> 2), (channel & 0x03) << 6, 0x00] response = self.spi.xfer2(cmd) # Из ответа: байт 1 биты 1-0 + байт 2 все 8 бит = 12 бит result = ((response[1] & 0x0F) << 8) | response[2] return result def read_voltage(self, channel: int, vref: float = 3.3) -> float: """Чтение в вольтах""" raw = self.read_channel(channel) return raw * vref / 4095.0 def read_all(self, vref: float = 3.3) -> list: """Чтение всех 8 каналов""" return [self.read_voltage(ch, vref) for ch in range(self.CHANNELS)] def close(self): self.spi.close() # Использование: adc = MCP3208_ADC() while True: voltages = adc.read_all() for ch, v in enumerate(voltages): print(f"CH{ch}: {v:.3f}В", end=" ") print() time.sleep(0.5) UART и последовательный портimport serial import serial.tools.list_ports # Найти все доступные порты def list_serial_ports(): ports = serial.tools.list_ports.comports() for port in ports: print(f"{port.device}: {port.description} ({port.hwid})") # На Raspberry Pi: # /dev/ttyAMA0 или /dev/serial0 — встроенный UART (GPIO 14/15) # /dev/ttyUSB0 — USB-UART адаптер # /dev/ttyACM0 — USB CDC (Arduino) # Важно для RPi: отключить console на /dev/serial0 # sudo raspi-config → Interface Options → Serial Port # "Would you like a login shell to be accessible over serial?" → No # "Would you like the serial port hardware to be enabled?" → Yes class SerialDevice: """Надёжная работа с последовательным портом""" def __init__(self, port: str, baudrate: int = 9600, timeout: float = 1.0): self.port_name = port self.baudrate = baudrate self.timeout = timeout self.ser = None def connect(self): try: self.ser = serial.Serial( port = self.port_name, baudrate = self.baudrate, bytesize = serial.EIGHTBITS, parity = serial.PARITY_NONE, stopbits = serial.STOPBITS_ONE, timeout = self.timeout ) print(f"Подключено: {self.port_name}") return True except serial.SerialException as e: print(f"Ошибка подключения: {e}") return False def send(self, data: bytes) -> bool: try: self.ser.write(data) return True except serial.SerialException: return False def send_line(self, text: str) -> bool: return self.send((text + '\n').encode('utf-8')) def read_line(self) -> str | None: try: line = self.ser.readline() if line: return line.decode('utf-8', errors='replace').strip() return None except serial.SerialException: return None def close(self): if self.ser and self.ser.is_open: self.ser.close() systemd: управление сервисами приложенияПравильное промышленное приложение на Linux должно запускаться как системный сервис — автостарт при загрузке, перезапуск при сбое, логирование. Создание systemd unit:# /etc/systemd/system/industrial-gateway.service [Unit] Description=Industrial IoT Gateway After=network.target Wants=network-online.target After=network-online.target # Зависимость от другого сервиса (например, MQTT-брокера) # Requires=mosquitto.service # After=mosquitto.service [Service] Type=simple User=pi Group=pi WorkingDirectory=/opt/gateway # Переменные окружения из файла EnvironmentFile=/etc/gateway/config.env # Команда запуска ExecStart=/opt/gateway/venv/bin/python /opt/gateway/main.py # Перезапуск при сбое Restart=on-failure RestartSec=10s StartLimitIntervalSec=60s StartLimitBurst=3 # Максимум 3 попытки за 60 секунд # Watchdog интеграция с systemd # Приложение должно вызывать sd_notify WATCHDOG=1 каждые N секунд WatchdogSec=30s # Логирование StandardOutput=journal StandardError=journal SyslogIdentifier=gateway # Безопасность (опционально, но рекомендуется) NoNewPrivileges=true PrivateTmp=true [Install] WantedBy=multi-user.target # Установка и управление: sudo systemctl daemon-reload sudo systemctl enable industrial-gateway sudo systemctl start industrial-gateway sudo systemctl status industrial-gateway # Логи: journalctl -u industrial-gateway -f # В реальном времени journalctl -u industrial-gateway --since today journalctl -u industrial-gateway -n 100 # Последние 100 строк Watchdog из Python (sd-notify):# pip install sdnotify import sdnotify import time import threading notifier = sdnotify.SystemdNotifier() def watchdog_thread(): """Пингуем systemd watchdog каждые 10 секунд""" while True: notifier.notify("WATCHDOG=1") time.sleep(10) def main(): # Сообщаем systemd что мы готовы notifier.notify("READY=1") notifier.notify("STATUS=Инициализация...") # Запускаем watchdog в фоне wdg = threading.Thread(target=watchdog_thread, daemon=True) wdg.start() try: # Основной цикл приложения while True: notifier.notify("STATUS=Работает нормально") # ... бизнес-логика time.sleep(1) except Exception as e: notifier.notify(f"STATUS=ОШИБКА: {e}") raise Сетевая конфигурация для промышленного шлюза# /etc/dhcpcd.conf — статический IP для промышленной сети interface eth0 static ip_address=192.168.1.200/24 static routers=192.168.1.1 static domain_name_servers=192.168.1.1 8.8.8.8 # Или через NetworkManager (современный способ): sudo nmcli con add type ethernet ifname eth0 con-name industrial \ ipv4.method manual ipv4.addresses 192.168.1.200/24 \ ipv4.gateway 192.168.1.1 ipv4.dns "192.168.1.1 8.8.8.8" sudo nmcli con up industrial Bonding (резервирование сети):# Два сетевых интерфейса — один основной, второй резервный # /etc/network/interfaces: auto bond0 iface bond0 inet static address 192.168.1.200 netmask 255.255.255.0 gateway 192.168.1.1 bond-slaves eth0 eth1 bond-mode active-backup # При отказе eth0 — переключаемся на eth1 bond-miimon 100 # Проверка связи каждые 100 мс bond-primary eth0 Buildroot: минимальный Linux-образДля серийного производства не нужен полный Raspberry Pi OS с Python IDE и LibreOffice. Нужен минимальный образ с только нужными компонентами. Buildroot — система сборки кастомных Linux-образов: # Клонируем Buildroot git clone https://git.buildroot.net/buildroot cd buildroot # Начинаем с дефолтной конфигурации для Raspberry Pi make raspberrypi4_64_defconfig # Настраиваем через menuconfig make menuconfig # Target packages → Networking applications → mosquitto (MQTT-брокер) # Target packages → Libraries → python3 # Target packages → Libraries → python-paho-mqtt # System configuration → Root password # Собираем (первый раз ~1-2 часа) make -j4 # Результат: output/images/sdcard.img # Записываем на SD: sudo dd if=output/images/sdcard.img of=/dev/sdX bs=4M status=progress Преимущества кастомного образа: Размер: 50–200 МБ вместо 4–8 ГБ Быстрый старт: 5–8 секунд вместо 30+ Безопасность: минимальная поверхность атаки Reproducible builds: одинаковый образ на всех устройствах Python-приложение как надёжный шлюз#!/opt/gateway/venv/bin/python3 """ Промышленный IoT-шлюз: Modbus RTU → MQTT """ import logging import signal import sys import time import json import threading from pathlib import Path from typing import Optional import sdnotify import paho.mqtt.client as mqtt from pymodbus.client import ModbusSerialClient # Настройка логирования (в journald через stderr) logging.basicConfig( level=logging.INFO, format='%(asctime)s [%(levelname)s] %(name)s: %(message)s', stream=sys.stderr ) log = logging.getLogger('gateway') class IndustrialGateway: def __init__(self): self.running = False self.notifier = sdnotify.SystemdNotifier() self.mqtt_client: Optional[mqtt.Client] = None self.modbus_client: Optional[ModbusSerialClient] = None # Конфигурация из переменных окружения import os self.mqtt_host = os.getenv('MQTT_HOST', 'localhost') self.mqtt_port = int(os.getenv('MQTT_PORT', '1883')) self.modbus_port = os.getenv('MODBUS_PORT', '/dev/serial0') self.modbus_baud = int(os.getenv('MODBUS_BAUD', '9600')) self.poll_interval = float(os.getenv('POLL_INTERVAL', '1.0')) def setup(self): """Инициализация подключений""" log.info("Инициализация шлюза...") # MQTT self.mqtt_client = mqtt.Client(client_id="industrial-gateway") self.mqtt_client.on_connect = self._on_mqtt_connect self.mqtt_client.on_disconnect = self._on_mqtt_disconnect self.mqtt_client.will_set("gateway/status", '{"online": false}', retain=True) self.mqtt_client.connect_async(self.mqtt_host, self.mqtt_port) self.mqtt_client.loop_start() # Modbus self.modbus_client = ModbusSerialClient( port=self.modbus_port, baudrate=self.modbus_baud, timeout=1.0 ) if not self.modbus_client.connect(): log.error(f"Не удалось подключиться к Modbus: {self.modbus_port}") def _on_mqtt_connect(self, client, userdata, flags, rc): if rc == 0: log.info(f"MQTT подключён: {self.mqtt_host}") client.publish("gateway/status", '{"online": true}', retain=True) else: log.error(f"MQTT ошибка подключения: {rc}") def _on_mqtt_disconnect(self, client, userdata, rc): log.warning(f"MQTT отключён (rc={rc}), переподключение...") def poll_device(self, device_addr: int, reg_start: int, reg_count: int) -> Optional[list]: """Опрос устройства Modbus""" try: result = self.modbus_client.read_input_registers( address=reg_start, count=reg_count, slave=device_addr ) if result.isError(): log.warning(f"Modbus ошибка: устройство {device_addr}") return None return result.registers except Exception as e: log.error(f"Исключение при опросе {device_addr}: {e}") return None def publish(self, topic: str, data: dict): """Публикация в MQTT""" try: payload = json.dumps(data, ensure_ascii=False) self.mqtt_client.publish(topic, payload) except Exception as e: log.error(f"Ошибка публикации: {e}") def run(self): """Главный цикл""" self.running = True # Сигналы завершения signal.signal(signal.SIGTERM, self._shutdown) signal.signal(signal.SIGINT, self._shutdown) self.setup() # Сообщаем systemd о готовности self.notifier.notify("READY=1") log.info("Шлюз запущен и готов к работе") poll_count = 0 while self.running: loop_start = time.monotonic() # Опрашиваем частотник (адрес 1, регистры 0-5) vfd_data = self.poll_device(1, 0, 6) if vfd_data: self.publish("factory/line1/vfd1/telemetry", { 'status_word': vfd_data[0], 'freq_hz': vfd_data[1] / 100.0, 'current_a': vfd_data[2] / 10.0, 'voltage_v': vfd_data[3], 'power_kw': vfd_data[4] / 10.0, 'fault_code': vfd_data[5], 'running': bool(vfd_data[0] & 0x0001), 'fault': bool(vfd_data[0] & 0x0008), }) # Опрашиваем датчик давления (адрес 5, регистры 0-1) pressure_data = self.poll_device(5, 0, 2) if pressure_data: import struct raw = struct.pack('>HH', pressure_data[0], pressure_data[1]) pressure = struct.unpack('>f', raw)[0] self.publish("factory/line1/pressure1/telemetry", { 'pressure_bar': round(pressure, 2) }) poll_count += 1 # Watchdog if poll_count % 5 == 0: self.notifier.notify("WATCHDOG=1") self.notifier.notify(f"STATUS=Опросов: {poll_count}") # Точный таймер интервала опроса elapsed = time.monotonic() - loop_start sleep_time = self.poll_interval - elapsed if sleep_time > 0: time.sleep(sleep_time) elif sleep_time < -0.1: log.warning(f"Опрос занял {elapsed:.3f}с (лимит {self.poll_interval}с)") def _shutdown(self, signum, frame): log.info(f"Получен сигнал {signum}, завершаем работу...") self.running = False if self.mqtt_client: self.mqtt_client.publish("gateway/status", '{"online": false}', retain=True) self.mqtt_client.loop_stop() if self.modbus_client: self.modbus_client.close() sys.exit(0) if __name__ == "__main__": gateway = IndustrialGateway() gateway.run() Безопасность Linux-устройства в сети# Минимальный hardening для промышленного устройства # 1. Обновление системы (автоматически) sudo apt install unattended-upgrades sudo dpkg-reconfigure unattended-upgrades # 2. UFW файрвол sudo apt install ufw sudo ufw default deny incoming sudo ufw default allow outgoing sudo ufw allow ssh sudo ufw allow 1883 # MQTT (только если нужен снаружи) sudo ufw enable # 3. Отключить неиспользуемые сервисы sudo systemctl disable bluetooth sudo systemctl disable avahi-daemon # 4. Изменить стандартный пароль! passwd pi # ОБЯЗАТЕЛЬНО # 5. SSH ключи вместо паролей # Скопировать ключ: ssh-copy-id pi@192.168.1.200 # /etc/ssh/sshd_config: # PasswordAuthentication no # PermitRootLogin no # 6. Логирование попыток взлома sudo apt install fail2ban ЗаключениеLinux на встраиваемых системах — мощнейший инструмент. Raspberry Pi, как платформа, имеет ограничения для промышленного применения, но при правильной настройке (read-only FS, watchdog, systemd-сервисы, резервирование) служит надёжно годами. Для новых промышленных проектов рассмотрите специализированные платформы: Raspberry Pi CM4 (eMMC, нет SD-карты), BeagleBone Black (PRU для реального времени), Toradex Colibri/Apalis (промышленный температурный диапазон, многолетняя поддержка), IEI, Advantech (сертифицированные промышленные платформы). Главный принцип для промышленного Linux: устройство должно работать без участия человека годами. Watchdog, автоперезапуск сервисов, защита файловой системы от записи, автоматические обновления безопасности — это не опции, это базовые требования.
Когда Linux вместо микроконтроллераВыбор между голым МК (Arduino/STM32) и Linux-системой (Raspberry Pi/промышленный ПК) — одно из ключевых архитектурных решений. Linux выигрывает когда нужно: Сложные сетевые протоколы (TCP/IP стек, TLS, MQTT, OPC UA) Работа с файлами: логирование, конфигурация, обновления ПО Высокоуровневые вычисления: Python/NumPy, ML-инференс Несколько параллельных задач с разной логикой Веб-интерфейс или REST API Большой объём RAM/Flash (база данных, historian) Микроконтроллер выигрывает когда нужно: Детерминированное реальное время (< 1 мс) Мгновенный старт (Linux загружается 10–30 секунд) Минимальное энергопотребление Дешёвое серийное производство Золотое правило: Linux для "мозга" и коммуникаций, микроконтроллер для "мышц" и реального времени. Оба — в одной системе, связанные UART или SPI. Raspberry Pi в промышленности: что учестьRaspberry Pi не проектировался для промышленного применения, но активно используется. Ключевые ограничения и решения: Ограничение 1: SD-карта умирает SD-карты не рассчитаны на постоянную запись. В промышленном применении — выход из строя за 3–12 месяцев. Решения: # 1. Read-only файловая система (overlayfs) # В /boot/cmdline.txt добавить: overlayroot=tmpfs # Данные писать только на специальный раздел с journaling # 2. Переместить tmpfs для логов в RAM # /etc/fstab: tmpfs /tmp tmpfs defaults,noatime,size=100m 0 0 tmpfs /var/log tmpfs defaults,noatime,size=50m 0 0 tmpfs /var/tmp tmpfs defaults,noatime,size=20m 0 0 # 3. Использовать SSD через USB3 или eMMC-модуль (CM4) Ограничение 2: Нет RTC (часов реального времени) При потере питания время сбивается. # Установить модуль DS3231 через I2C # /boot/config.txt: dtoverlay=i2c-rtc,ds3231 # Синхронизация при загрузке: sudo hwclock --hctosys # Hardware clock → System clock Ограничение 3: Нет аппаратного watchdog "из коробки" # Включить встроенный watchdog BCM2835 # /boot/config.txt: dtparam=watchdog=on # /etc/systemd/system.conf: RuntimeWatchdogSec=10 # Сброс если systemd не пингует 10 секунд RebootWatchdogSec=60 # Проверка: ls /dev/watchdog # Должен существовать GPIO: управление пинами из userspacesysfs (устаревший, но всё ещё работает):# Экспортируем GPIO 17 echo "17" > /sys/class/gpio/export # Устанавливаем направление echo "out" > /sys/class/gpio/gpio17/direction # Устанавливаем значение echo "1" > /sys/class/gpio/gpio17/value # Читаем состояние входа cat /sys/class/gpio/gpio18/value libgpiod (современный стандарт):# Установка sudo apt install gpiod libgpiod-dev # Командная строка gpioget gpiochip0 17 # Прочитать GPIO 17 gpioset gpiochip0 17=1 # Установить в HIGH gpioset gpiochip0 17=0 18=1 # Установить несколько gpioinfo gpiochip0 # Информация о всех пинах # Python + gpiod # pip install gpiod import gpiod import time # Открываем чип chip = gpiod.Chip('gpiochip0') # Настраиваем пины led_line = chip.get_line(17) button_line = chip.get_line(18) led_config = gpiod.LineRequest() led_config.consumer = "myapp" led_config.request_type = gpiod.LineRequest.DIRECTION_OUTPUT led_line.request(led_config) btn_config = gpiod.LineRequest() btn_config.consumer = "myapp" btn_config.request_type = gpiod.LineRequest.EVENT_BOTH_EDGES # Прерывания! button_line.request(btn_config) try: while True: # Ожидание события с таймаутом 100 мс event_happened = button_line.event_wait(nsec=100_000_000) if event_happened: event = button_line.event_read() if event.type == gpiod.LineEvent.RISING_EDGE: print("Кнопка нажата") led_line.set_value(1) else: print("Кнопка отпущена") led_line.set_value(0) finally: led_line.release() button_line.release() SPI и I2C из userspaceI2C (smbus2):# pip install smbus2 import smbus2 import time class BME280_Linux: """Работа с датчиком BME280 через Linux I2C""" ADDR = 0x76 REG_ID = 0xD0 REG_CTRL = 0xF4 REG_DATA = 0xF7 def __init__(self, bus_num: int = 1): self.bus = smbus2.SMBus(bus_num) def read_reg(self, reg: int) -> int: return self.bus.read_byte_data(self.ADDR, reg) def write_reg(self, reg: int, value: int): self.bus.write_byte_data(self.ADDR, reg, value) def read_burst(self, reg: int, length: int) -> bytes: return bytes(self.bus.read_i2c_block_data(self.ADDR, reg, length)) def init(self): chip_id = self.read_reg(self.REG_ID) if chip_id != 0x60: raise RuntimeError(f"BME280 не найден, ID={chip_id:#x}") # Нормальный режим, oversampling ×4 self.write_reg(0xF4, 0x97) # ctrl_meas self.write_reg(0xF5, 0xA0) # config: IIR filter 16 time.sleep(0.1) def read(self) -> dict: data = self.read_burst(self.REG_DATA, 6) raw_press = (data[0] << 12) | (data[1] << 4) | (data[2] >> 4) raw_temp = (data[3] << 12) | (data[4] << 4) | (data[5] >> 4) # Упрощённое преобразование (без компенсации) # В реальности нужно читать калибровочные коэффициенты! temp = raw_temp / 5120.0 pressure = raw_press / 25600.0 / 100.0 # гПа return {'temperature': round(temp, 1), 'pressure': round(pressure, 1)} # Использование: sensor = BME280_Linux(bus_num=1) # /dev/i2c-1 sensor.init() while True: data = sensor.read() print(f"T={data['temperature']}°C, P={data['pressure']}гПа") time.sleep(1) SPI (spidev):import spidev import time class MCP3208_ADC: """12-битный АЦП MCP3208 через SPI""" CHANNELS = 8 def __init__(self, bus: int = 0, device: int = 0, speed_hz: int = 1_000_000): self.spi = spidev.SpiDev() self.spi.open(bus, device) # /dev/spidev0.0 self.spi.max_speed_hz = speed_hz self.spi.mode = 0 def read_channel(self, channel: int) -> int: """Чтение канала 0-7, возвращает 0-4095""" if not 0 <= channel < self.CHANNELS: raise ValueError(f"Канал {channel} вне диапазона 0-7") # MCP3208: 3 байта транзакции # Байт 1: старт-бит + single/diff + D2 # Байт 2: D1, D0, X, X, X, X, X, X # Байт 3: X, X, X, X, X, X, X, X cmd = [0x06 | (channel >> 2), (channel & 0x03) << 6, 0x00] response = self.spi.xfer2(cmd) # Из ответа: байт 1 биты 1-0 + байт 2 все 8 бит = 12 бит result = ((response[1] & 0x0F) << 8) | response[2] return result def read_voltage(self, channel: int, vref: float = 3.3) -> float: """Чтение в вольтах""" raw = self.read_channel(channel) return raw * vref / 4095.0 def read_all(self, vref: float = 3.3) -> list: """Чтение всех 8 каналов""" return [self.read_voltage(ch, vref) for ch in range(self.CHANNELS)] def close(self): self.spi.close() # Использование: adc = MCP3208_ADC() while True: voltages = adc.read_all() for ch, v in enumerate(voltages): print(f"CH{ch}: {v:.3f}В", end=" ") print() time.sleep(0.5) UART и последовательный портimport serial import serial.tools.list_ports # Найти все доступные порты def list_serial_ports(): ports = serial.tools.list_ports.comports() for port in ports: print(f"{port.device}: {port.description} ({port.hwid})") # На Raspberry Pi: # /dev/ttyAMA0 или /dev/serial0 — встроенный UART (GPIO 14/15) # /dev/ttyUSB0 — USB-UART адаптер # /dev/ttyACM0 — USB CDC (Arduino) # Важно для RPi: отключить console на /dev/serial0 # sudo raspi-config → Interface Options → Serial Port # "Would you like a login shell to be accessible over serial?" → No # "Would you like the serial port hardware to be enabled?" → Yes class SerialDevice: """Надёжная работа с последовательным портом""" def __init__(self, port: str, baudrate: int = 9600, timeout: float = 1.0): self.port_name = port self.baudrate = baudrate self.timeout = timeout self.ser = None def connect(self): try: self.ser = serial.Serial( port = self.port_name, baudrate = self.baudrate, bytesize = serial.EIGHTBITS, parity = serial.PARITY_NONE, stopbits = serial.STOPBITS_ONE, timeout = self.timeout ) print(f"Подключено: {self.port_name}") return True except serial.SerialException as e: print(f"Ошибка подключения: {e}") return False def send(self, data: bytes) -> bool: try: self.ser.write(data) return True except serial.SerialException: return False def send_line(self, text: str) -> bool: return self.send((text + '\n').encode('utf-8')) def read_line(self) -> str | None: try: line = self.ser.readline() if line: return line.decode('utf-8', errors='replace').strip() return None except serial.SerialException: return None def close(self): if self.ser and self.ser.is_open: self.ser.close() systemd: управление сервисами приложенияПравильное промышленное приложение на Linux должно запускаться как системный сервис — автостарт при загрузке, перезапуск при сбое, логирование. Создание systemd unit:# /etc/systemd/system/industrial-gateway.service [Unit] Description=Industrial IoT Gateway After=network.target Wants=network-online.target After=network-online.target # Зависимость от другого сервиса (например, MQTT-брокера) # Requires=mosquitto.service # After=mosquitto.service [Service] Type=simple User=pi Group=pi WorkingDirectory=/opt/gateway # Переменные окружения из файла EnvironmentFile=/etc/gateway/config.env # Команда запуска ExecStart=/opt/gateway/venv/bin/python /opt/gateway/main.py # Перезапуск при сбое Restart=on-failure RestartSec=10s StartLimitIntervalSec=60s StartLimitBurst=3 # Максимум 3 попытки за 60 секунд # Watchdog интеграция с systemd # Приложение должно вызывать sd_notify WATCHDOG=1 каждые N секунд WatchdogSec=30s # Логирование StandardOutput=journal StandardError=journal SyslogIdentifier=gateway # Безопасность (опционально, но рекомендуется) NoNewPrivileges=true PrivateTmp=true [Install] WantedBy=multi-user.target # Установка и управление: sudo systemctl daemon-reload sudo systemctl enable industrial-gateway sudo systemctl start industrial-gateway sudo systemctl status industrial-gateway # Логи: journalctl -u industrial-gateway -f # В реальном времени journalctl -u industrial-gateway --since today journalctl -u industrial-gateway -n 100 # Последние 100 строк Watchdog из Python (sd-notify):# pip install sdnotify import sdnotify import time import threading notifier = sdnotify.SystemdNotifier() def watchdog_thread(): """Пингуем systemd watchdog каждые 10 секунд""" while True: notifier.notify("WATCHDOG=1") time.sleep(10) def main(): # Сообщаем systemd что мы готовы notifier.notify("READY=1") notifier.notify("STATUS=Инициализация...") # Запускаем watchdog в фоне wdg = threading.Thread(target=watchdog_thread, daemon=True) wdg.start() try: # Основной цикл приложения while True: notifier.notify("STATUS=Работает нормально") # ... бизнес-логика time.sleep(1) except Exception as e: notifier.notify(f"STATUS=ОШИБКА: {e}") raise Сетевая конфигурация для промышленного шлюза# /etc/dhcpcd.conf — статический IP для промышленной сети interface eth0 static ip_address=192.168.1.200/24 static routers=192.168.1.1 static domain_name_servers=192.168.1.1 8.8.8.8 # Или через NetworkManager (современный способ): sudo nmcli con add type ethernet ifname eth0 con-name industrial \ ipv4.method manual ipv4.addresses 192.168.1.200/24 \ ipv4.gateway 192.168.1.1 ipv4.dns "192.168.1.1 8.8.8.8" sudo nmcli con up industrial Bonding (резервирование сети):# Два сетевых интерфейса — один основной, второй резервный # /etc/network/interfaces: auto bond0 iface bond0 inet static address 192.168.1.200 netmask 255.255.255.0 gateway 192.168.1.1 bond-slaves eth0 eth1 bond-mode active-backup # При отказе eth0 — переключаемся на eth1 bond-miimon 100 # Проверка связи каждые 100 мс bond-primary eth0 Buildroot: минимальный Linux-образДля серийного производства не нужен полный Raspberry Pi OS с Python IDE и LibreOffice. Нужен минимальный образ с только нужными компонентами. Buildroot — система сборки кастомных Linux-образов: # Клонируем Buildroot git clone https://git.buildroot.net/buildroot cd buildroot # Начинаем с дефолтной конфигурации для Raspberry Pi make raspberrypi4_64_defconfig # Настраиваем через menuconfig make menuconfig # Target packages → Networking applications → mosquitto (MQTT-брокер) # Target packages → Libraries → python3 # Target packages → Libraries → python-paho-mqtt # System configuration → Root password # Собираем (первый раз ~1-2 часа) make -j4 # Результат: output/images/sdcard.img # Записываем на SD: sudo dd if=output/images/sdcard.img of=/dev/sdX bs=4M status=progress Преимущества кастомного образа: Размер: 50–200 МБ вместо 4–8 ГБ Быстрый старт: 5–8 секунд вместо 30+ Безопасность: минимальная поверхность атаки Reproducible builds: одинаковый образ на всех устройствах Python-приложение как надёжный шлюз#!/opt/gateway/venv/bin/python3 """ Промышленный IoT-шлюз: Modbus RTU → MQTT """ import logging import signal import sys import time import json import threading from pathlib import Path from typing import Optional import sdnotify import paho.mqtt.client as mqtt from pymodbus.client import ModbusSerialClient # Настройка логирования (в journald через stderr) logging.basicConfig( level=logging.INFO, format='%(asctime)s [%(levelname)s] %(name)s: %(message)s', stream=sys.stderr ) log = logging.getLogger('gateway') class IndustrialGateway: def __init__(self): self.running = False self.notifier = sdnotify.SystemdNotifier() self.mqtt_client: Optional[mqtt.Client] = None self.modbus_client: Optional[ModbusSerialClient] = None # Конфигурация из переменных окружения import os self.mqtt_host = os.getenv('MQTT_HOST', 'localhost') self.mqtt_port = int(os.getenv('MQTT_PORT', '1883')) self.modbus_port = os.getenv('MODBUS_PORT', '/dev/serial0') self.modbus_baud = int(os.getenv('MODBUS_BAUD', '9600')) self.poll_interval = float(os.getenv('POLL_INTERVAL', '1.0')) def setup(self): """Инициализация подключений""" log.info("Инициализация шлюза...") # MQTT self.mqtt_client = mqtt.Client(client_id="industrial-gateway") self.mqtt_client.on_connect = self._on_mqtt_connect self.mqtt_client.on_disconnect = self._on_mqtt_disconnect self.mqtt_client.will_set("gateway/status", '{"online": false}', retain=True) self.mqtt_client.connect_async(self.mqtt_host, self.mqtt_port) self.mqtt_client.loop_start() # Modbus self.modbus_client = ModbusSerialClient( port=self.modbus_port, baudrate=self.modbus_baud, timeout=1.0 ) if not self.modbus_client.connect(): log.error(f"Не удалось подключиться к Modbus: {self.modbus_port}") def _on_mqtt_connect(self, client, userdata, flags, rc): if rc == 0: log.info(f"MQTT подключён: {self.mqtt_host}") client.publish("gateway/status", '{"online": true}', retain=True) else: log.error(f"MQTT ошибка подключения: {rc}") def _on_mqtt_disconnect(self, client, userdata, rc): log.warning(f"MQTT отключён (rc={rc}), переподключение...") def poll_device(self, device_addr: int, reg_start: int, reg_count: int) -> Optional[list]: """Опрос устройства Modbus""" try: result = self.modbus_client.read_input_registers( address=reg_start, count=reg_count, slave=device_addr ) if result.isError(): log.warning(f"Modbus ошибка: устройство {device_addr}") return None return result.registers except Exception as e: log.error(f"Исключение при опросе {device_addr}: {e}") return None def publish(self, topic: str, data: dict): """Публикация в MQTT""" try: payload = json.dumps(data, ensure_ascii=False) self.mqtt_client.publish(topic, payload) except Exception as e: log.error(f"Ошибка публикации: {e}") def run(self): """Главный цикл""" self.running = True # Сигналы завершения signal.signal(signal.SIGTERM, self._shutdown) signal.signal(signal.SIGINT, self._shutdown) self.setup() # Сообщаем systemd о готовности self.notifier.notify("READY=1") log.info("Шлюз запущен и готов к работе") poll_count = 0 while self.running: loop_start = time.monotonic() # Опрашиваем частотник (адрес 1, регистры 0-5) vfd_data = self.poll_device(1, 0, 6) if vfd_data: self.publish("factory/line1/vfd1/telemetry", { 'status_word': vfd_data[0], 'freq_hz': vfd_data[1] / 100.0, 'current_a': vfd_data[2] / 10.0, 'voltage_v': vfd_data[3], 'power_kw': vfd_data[4] / 10.0, 'fault_code': vfd_data[5], 'running': bool(vfd_data[0] & 0x0001), 'fault': bool(vfd_data[0] & 0x0008), }) # Опрашиваем датчик давления (адрес 5, регистры 0-1) pressure_data = self.poll_device(5, 0, 2) if pressure_data: import struct raw = struct.pack('>HH', pressure_data[0], pressure_data[1]) pressure = struct.unpack('>f', raw)[0] self.publish("factory/line1/pressure1/telemetry", { 'pressure_bar': round(pressure, 2) }) poll_count += 1 # Watchdog if poll_count % 5 == 0: self.notifier.notify("WATCHDOG=1") self.notifier.notify(f"STATUS=Опросов: {poll_count}") # Точный таймер интервала опроса elapsed = time.monotonic() - loop_start sleep_time = self.poll_interval - elapsed if sleep_time > 0: time.sleep(sleep_time) elif sleep_time < -0.1: log.warning(f"Опрос занял {elapsed:.3f}с (лимит {self.poll_interval}с)") def _shutdown(self, signum, frame): log.info(f"Получен сигнал {signum}, завершаем работу...") self.running = False if self.mqtt_client: self.mqtt_client.publish("gateway/status", '{"online": false}', retain=True) self.mqtt_client.loop_stop() if self.modbus_client: self.modbus_client.close() sys.exit(0) if __name__ == "__main__": gateway = IndustrialGateway() gateway.run() Безопасность Linux-устройства в сети# Минимальный hardening для промышленного устройства # 1. Обновление системы (автоматически) sudo apt install unattended-upgrades sudo dpkg-reconfigure unattended-upgrades # 2. UFW файрвол sudo apt install ufw sudo ufw default deny incoming sudo ufw default allow outgoing sudo ufw allow ssh sudo ufw allow 1883 # MQTT (только если нужен снаружи) sudo ufw enable # 3. Отключить неиспользуемые сервисы sudo systemctl disable bluetooth sudo systemctl disable avahi-daemon # 4. Изменить стандартный пароль! passwd pi # ОБЯЗАТЕЛЬНО # 5. SSH ключи вместо паролей # Скопировать ключ: ssh-copy-id pi@192.168.1.200 # /etc/ssh/sshd_config: # PasswordAuthentication no # PermitRootLogin no # 6. Логирование попыток взлома sudo apt install fail2ban ЗаключениеLinux на встраиваемых системах — мощнейший инструмент. Raspberry Pi, как платформа, имеет ограничения для промышленного применения, но при правильной настройке (read-only FS, watchdog, systemd-сервисы, резервирование) служит надёжно годами. Для новых промышленных проектов рассмотрите специализированные платформы: Raspberry Pi CM4 (eMMC, нет SD-карты), BeagleBone Black (PRU для реального времени), Toradex Colibri/Apalis (промышленный температурный диапазон, многолетняя поддержка), IEI, Advantech (сертифицированные промышленные платформы). Главный принцип для промышленного Linux: устройство должно работать без участия человека годами. Watchdog, автоперезапуск сервисов, защита файловой системы от записи, автоматические обновления безопасности — это не опции, это базовые требования. -
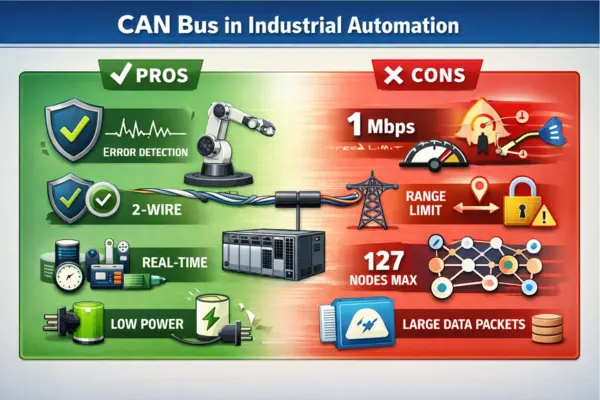 Почему CAN Bus? История одного протокола1983 год. Инженеры Bosch смотрят на жгут проводки в Mercedes-Benz W126 и понимают, что так продолжаться не может. 1000+ метров провода, сотни коннекторов — система ненадёжна, дорога и тяжела. Им нужна шина данных, по которой все блоки управления могут общаться. В 1986 году появляется CAN (Controller Area Network). В 1991 году Mercedes внедряет CAN в S-класс. Сегодня нет ни одного автомобиля без CAN. И не только автомобиля: промышленные роботы, строительная техника, медицинское оборудование, поезда, самолёты. Секреты успеха: Надёжность — дифференциальный сигнал, устойчив к помехам Детерминизм — приоритетная схема без коллизий Простота — только 2 провода (CANH и CANL) Скорость — до 1 Мбит/с (Classic CAN), до 8 Мбит/с (CAN FD) Физический уровень: как это работаетCAN использует дифференциальную пару: два провода CANH и CANL. Информация кодируется разностью напряжений, а не абсолютным значением. Рецессивный бит (логическая 1): CANH ≈ 2.5В, CANL ≈ 2.5В → разность ≈ 0В Доминантный бит (логический 0): CANH ≈ 3.5В, CANL ≈ 1.5В → разность ≈ 2В Дифференциальный сигнал нечувствителен к синфазным помехам — если на оба провода наводится шум, разность остаётся неизменной. Именно поэтому CAN работает в двигательном отсеке автомобиля рядом с высоковольтной проводкой зажигания. ТопологияСтрого линейная шина с терминаторами 120 Ом на концах: [Узел A]──────[Узел B]──────[Узел C]──────[Узел D] 120Ом 120Ом Максимальная длина зависит от скорости: Скорость Макс. длина 1 Мбит/с 25 м 500 Кбит/с 100 м 250 Кбит/с 250 м 125 Кбит/с 500 м 10 Кбит/с 5000 м Структура CAN-фрейма (Standard 11-bit)SOF│ Identifier (11 бит) │RTR│IDE│r0│ DLC (4) │ Data (0-8 байт) │ CRC │ACK│ EOF 1 11 1 1 1 4 0-64 15 2 7 SOF (Start of Frame): 1 доминантный бит — все узлы синхронизируются. Identifier (ID, 11 бит): Идентифицирует тип сообщения, а не адрес отправителя/получателя. Одновременно определяет приоритет — чем меньше ID, тем выше приоритет. ID=0 — наивысший приоритет. RTR (Remote Transmission Request): Запрос данных от другого узла (редко используется). DLC (Data Length Code): Количество байт данных, 0–8. Data: Полезные данные, 0–8 байт. CRC (15 бит): Контрольная сумма для обнаружения ошибок. ACK: Все узлы, успешно принявшие фрейм, устанавливают доминантный бит в поле ACK. Отправитель проверяет — если ACK не получен, повторяет передачу. Extended Frame (29-bit ID)Для приложений где 2048 идентификаторов мало (J1939, CANopen): SOF│ ID_A (11) │SRR│IDE=1│ ID_B (18 бит) │RTR│... 29-битный ID даёт 536 870 912 возможных идентификаторов. Битовый арбитраж: без коллизийСамая элегантная часть CAN. Когда два узла начинают передачу одновременно — нет коллизии, как в Ethernet. Побеждает тот, у кого ID меньше (приоритетнее). Механизм: каждый передающий узел одновременно читает шину. Пока он видит то, что передаёт — продолжает. Как только видит расхождение (отправил рецессивный 1, а на шине доминантный 0 — значит другой узел передаёт доминантный бит с более высоким приоритетом) — немедленно прекращает передачу и переходит в режим приёма. Узел A: 0 0 0 1 0 ... (ID = 0b00010...) Узел B: 0 0 0 0 1 ... (ID = 0b00001...) Бит 4: Узел A передаёт рецессивный (1) Узел B передаёт доминантный (0) Шина показывает доминантный (0) → Узел A видит расхождение и ОСТАНАВЛИВАЕТСЯ → Узел B продолжает передачу Узел B выиграл арбитраж! Нет потерянных данных, нет задержек. Обработка ошибок и состояния узлаCAN имеет развитую систему самодиагностики. Каждый узел ведёт два счётчика: TEC (Transmit Error Counter) REC (Receive Error Counter) Состояния узла: Error Active (TEC<128, REC<128) — Нормальная работа ↓ TEC или REC ≥ 128 Error Passive (TEC≥128 или REC≥128) — Узел работает, но: - Не посылает Active Error Flags - Ждёт 8 рецессивных бит между передачами ↓ TEC ≥ 256 Bus Off — Узел ОТКЛЮЧЁН от шины (требует программного сброса или 128×11 рецессивных бит) Это важно: неисправный узел не "разваливает" шину, а сначала становится пассивным, затем отключается — остальные продолжают работать. STM32: встроенный CAN-контроллерSTM32F103 имеет встроенный bxCAN (Basic Extended CAN). Пины: PA11/PA12 или PB8/PB9. #include "stm32f1xx_hal.h" CAN_HandleTypeDef hcan; // ===== ИНИЦИАЛИЗАЦИЯ CAN 500 Кбит/с ===== void CAN_Init_500kbps(void) { hcan.Instance = CAN1; // Тайминг для 500 Кбит/с при тактовой 36 МГц // Bit time = Prescaler × (1 + BS1 + BS2) // 36 МГц / 4 / (1+7+2) = 900 Кбит/с ... нет, подберём: // 36 МГц / 9 / (1+3+2) = 500 Кбит/с ← правильно hcan.Init.Prescaler = 9; hcan.Init.Mode = CAN_MODE_NORMAL; // CAN_MODE_LOOPBACK для теста! hcan.Init.SyncJumpWidth = CAN_SJW_1TQ; hcan.Init.TimeSeg1 = CAN_BS1_3TQ; // BS1 = 3 TQ hcan.Init.TimeSeg2 = CAN_BS2_2TQ; // BS2 = 2 TQ hcan.Init.TimeTriggeredMode = DISABLE; hcan.Init.AutoBusOff = ENABLE; // Автоматический выход из Bus-Off hcan.Init.AutoWakeUp = DISABLE; hcan.Init.AutoRetransmission = ENABLE; // Автоповтор при ошибках hcan.Init.ReceiveFifoLocked = DISABLE; hcan.Init.TransmitFifoPriority= DISABLE; HAL_CAN_Init(&hcan); // ===== ФИЛЬТР ПРИЁМА ===== CAN_FilterTypeDef filter = {0}; // Принимать ВСЕ сообщения (маска 0 — все биты любые) filter.FilterBank = 0; filter.FilterMode = CAN_FILTERMODE_IDMASK; filter.FilterScale = CAN_FILTERSCALE_32BIT; filter.FilterIdHigh = 0x0000; filter.FilterIdLow = 0x0000; filter.FilterMaskIdHigh = 0x0000; // Маска 0 = принимать всё filter.FilterMaskIdLow = 0x0000; filter.FilterFIFOAssignment = CAN_RX_FIFO0; filter.FilterActivation = ENABLE; HAL_CAN_ConfigFilter(&hcan, &filter); // Активировать прерывания приёма HAL_CAN_ActivateNotification(&hcan, CAN_IT_RX_FIFO0_MSG_PENDING); HAL_CAN_Start(&hcan); } // ===== ОТПРАВКА СООБЩЕНИЯ ===== HAL_StatusTypeDef CAN_SendMessage(uint32_t id, uint8_t *data, uint8_t len) { CAN_TxHeaderTypeDef txHeader; uint32_t txMailbox; txHeader.StdId = id; // 11-битный ID txHeader.ExtId = 0; txHeader.IDE = CAN_ID_STD; txHeader.RTR = CAN_RTR_DATA; txHeader.DLC = len; txHeader.TransmitGlobalTime = DISABLE; return HAL_CAN_AddTxMessage(&hcan, &txHeader, data, &txMailbox); } // ===== ПРИЁМ ЧЕРЕЗ ПРЕРЫВАНИЕ ===== void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan_ptr) { CAN_RxHeaderTypeDef rxHeader; uint8_t rxData[8]; if (HAL_CAN_GetRxMessage(hcan_ptr, CAN_RX_FIFO0, &rxHeader, rxData) == HAL_OK) { uint32_t id = (rxHeader.IDE == CAN_ID_STD) ? rxHeader.StdId : rxHeader.ExtId; // Обработка по ID switch (id) { case 0x100: // Состояние узла 1 process_node1_status(rxData, rxHeader.DLC); break; case 0x200: // Измерения температуры process_temperature_data(rxData, rxHeader.DLC); break; default: // Неизвестное сообщение break; } } } // Пример обработки температурных данных // Договорённость: 2 байта = температура × 10 (signed) void process_temperature_data(uint8_t *data, uint8_t len) { if (len < 2) return; int16_t raw = (int16_t)((data[0] << 8) | data[1]); float temperature = raw / 10.0f; if (temperature > 80.0f) { // Высокая температура — принять меры activate_cooling(); } } // ===== ПРИМЕР: ПЕРИОДИЧЕСКАЯ ОТПРАВКА ДАННЫХ УЗЛА ===== void CAN_SendNodeStatus(void) { uint8_t data[8]; // Байт 0: статусные биты data[0] = 0x00; if (motor_running) data[0] |= 0x01; if (fault_active) data[0] |= 0x02; if (io_ready) data[0] |= 0x04; // Байты 1-2: скорость двигателя (об/мин × 10, unsigned) uint16_t speed_raw = (uint16_t)(motor_speed_rpm * 10.0f); data[1] = speed_raw >> 8; data[2] = speed_raw & 0xFF; // Байты 3-4: ток (А × 100, signed) int16_t current_raw = (int16_t)(motor_current_a * 100.0f); data[3] = current_raw >> 8; data[4] = current_raw & 0xFF; // Байты 5-6: температура (°C × 10, signed) int16_t temp_raw = (int16_t)(temperature_c * 10.0f); data[5] = temp_raw >> 8; data[6] = temp_raw & 0xFF; // Байт 7: номер пакета (для обнаружения потерь) static uint8_t packet_num = 0; data[7] = packet_num++; CAN_SendMessage(0x100, data, 8); } Arduino + MCP2515: добавляем CANArduino не имеет встроенного CAN. Используем MCP2515 — внешний CAN-контроллер с SPI. #include <SPI.h> #include <mcp2515.h> // Библиотека arduino-mcp2515 MCP2515 mcp2515(10); // CS pin struct can_frame rxMsg, txMsg; void setup() { Serial.begin(115200); SPI.begin(); mcp2515.reset(); mcp2515.setBitrate(CAN_500KBPS, MCP_8MHZ); // 500 Кбит/с, кварц 8 МГц mcp2515.setNormalMode(); // или setLoopbackMode() для теста без шины Serial.println("CAN Bus Ready"); } // Отправка измерений температуры void sendTemperature(float temp_celsius) { txMsg.can_id = 0x200; // ID нашего сообщения txMsg.can_dlc = 2; // 2 байта данных // Упаковываем: температура × 10, int16 int16_t raw = (int16_t)(temp_celsius * 10.0f); txMsg.data[0] = raw >> 8; txMsg.data[1] = raw & 0xFF; mcp2515.sendMessage(&txMsg); } void loop() { // Приём сообщений if (mcp2515.readMessage(&rxMsg) == MCP2515::ERROR_OK) { Serial.print("ID: 0x"); Serial.print(rxMsg.can_id, HEX); Serial.print(", DLC: "); Serial.print(rxMsg.can_dlc); Serial.print(", Data: "); for (int i = 0; i < rxMsg.can_dlc; i++) { Serial.print("0x"); Serial.print(rxMsg.data[i], HEX); Serial.print(" "); } Serial.println(); // Обработка сообщения статуса узла if (rxMsg.can_id == 0x100 && rxMsg.can_dlc >= 3) { bool running = rxMsg.data[0] & 0x01; bool fault = rxMsg.data[0] & 0x02; uint16_t speed_raw = (rxMsg.data[1] << 8) | rxMsg.data[2]; float speed = speed_raw / 10.0f; Serial.print("Узел 1: "); Serial.print(running ? "Работает" : "Стоит"); if (fault) Serial.print(" [АВАРИЯ]"); Serial.print(", Скорость: "); Serial.print(speed); Serial.println(" об/мин"); } } // Отправка своих данных каждые 100 мс static uint32_t lastSend = 0; if (millis() - lastSend >= 100) { lastSend = millis(); float temp = 25.0f + analogRead(A0) * 0.05f; sendTemperature(temp); } } Linux SocketCAN: мощный инструментарийНа Linux (Raspberry Pi, промышленные PC) CAN работает через SocketCAN — часть ядра с 2009 года. # Настройка CAN интерфейса # Если есть USB-CAN адаптер (Peak PCAN, Kvaser, SeedStudio) sudo ip link set can0 up type can bitrate 500000 # Или через модуль ядра для MCP2515 на Raspberry Pi # /boot/config.txt: # dtoverlay=mcp2515-can0,oscillator=8000000,interrupt=25 # Просмотр трафика candump can0 # Отправка сообщения: ID=0x100, 3 байта cansend can0 100#010203 # Фильтрация - только ID 0x100-0x1FF candump can0 100~1FF # Статистика ошибок ip -details -statistics link show can0 # Python + python-can # pip install python-can import can import struct import time # Создаём интерфейс bus = can.interface.Bus(channel='can0', bustype='socketcan') # Отправка def send_temperature(temp: float): raw = struct.pack('>h', int(temp * 10)) # big-endian signed short msg = can.Message(arbitration_id=0x200, data=raw, is_extended_id=False) bus.send(msg) # Приём с фильтрацией по ID bus.set_filters([ {"can_id": 0x100, "can_mask": 0x7FF, "extended": False}, # Только 0x100 {"can_id": 0x200, "can_mask": 0x7FF, "extended": False}, # И 0x200 ]) print("Ожидаем CAN-сообщения...") for msg in bus: if msg.arbitration_id == 0x100: status = msg.data[0] speed = struct.unpack('>H', bytes(msg.data[1:3]))[0] / 10.0 current = struct.unpack('>h', bytes(msg.data[3:5]))[0] / 100.0 temp = struct.unpack('>h', bytes(msg.data[5:7]))[0] / 10.0 print(f"Узел 100: {'Работает' if status & 1 else 'Стоит'}, " f"n={speed} об/мин, I={current}А, T={temp}°C") Протоколы высшего уровняJ1939 — для грузовой техники и дизелейJ1939 — стандарт SAE для коммуникации в коммерческом транспорте и тяжёлой технике. Работает поверх CAN с 29-битными ID. Структура J1939 ID (29 бит): Приоритет (3б) │ Reserved (1б) │ Data Page (1б) │ PGN (8б) │ Source Address (8б) Популярные PGN (Parameter Group Number): PGN 0xF004 (EEC1) — данные двигателя: обороты, момент, нагрузка PGN 0xFEF1 (CCVS) — скорость, круиз-контроль PGN 0xFEE5 (HOURS) — моточасы PGN 0xFEE6 (TIME) — время и дата CANopen — для промышленной автоматизацииCANopen — стандарт для промышленного оборудования: частотники, серводрайвы, I/O модули. Определяет: Словарь объектов (Object Dictionary) — структурированное хранилище всех параметров устройства PDO (Process Data Object) — быстрая передача данных реального времени (заменяет аналог 4-20мА) SDO (Service Data Object) — медленная конфигурация и чтение параметров NMT (Network Management) — управление состоянием узлов Heartbeat / Node Guarding — контроль жизнеспособности узлов Пример: частотник с CANopen. Через SDO читаем/пишем параметры (коэффициент разгона, макс. частота). Через PDO каждые 10 мс обмениваемся уставкой и текущими значениями. Диагностика сети CANПризнаки проблем:Симптом Вероятная причина Bus Off у одного узла Неисправный узел, помехи на кабеле Много ошибок CRC Неправильный биттайминг, плохая линия Узел не видит свои сообщения в ACK Он один на шине, некому подтверждать Периодические потери сообщений Нет терминаторов или два на одном конце Все узлы в Bus Off Неисправная нагрузка на шине Инструменты:PEAK PCAN-USB (~€80) + PCAN-View (бесплатно) — лучший бюджетный вариант Kvaser Leaf Light — популярен с CANalyzer Vector CANalyzer — профессиональный инструмент для автомобильных применений Linux candump / cansniffer — бесплатно, для socketcan-интерфейсов Wireshark с плагином SocketCAN — анализ на Linux CAN FD: следующее поколениеCAN FD (Flexible Data-rate) — развитие стандарта 2012 года. Нет обратной совместимости на физическом уровне, но концептуально тот же подход. Отличия от Classic CAN: До 64 байт данных в одном фрейме (против 8) До 8 Мбит/с в поле данных (при сохранении 1 Мбит/с для арбитража) Обязательная CRC 21-бит для надёжности при высоких скоростях CAN FD активно внедряется в новых автомобилях (все автомобили с AUTOSAR) и промышленной автоматизации. STM32G4, STM32H7 имеют встроенный FDCAN-контроллер. Практический чеклист для CAN-системы□ Терминаторы 120 Ом на ОБОИХ концах шины (и только там) □ Экранированная витая пара (для помехонагруженных сред) □ Максимальная длина ответвлений (stub) < 0.3 м □ Все узлы имеют ОДИНАКОВУЮ скорость и биттайминг □ Адреса узлов (если используются) уникальны □ Заземление: один общий провод + заземление экрана в одной точке □ Проверить напряжение CANH/CANL (рецесс.: оба ~2.5В, домин.: разность ~2В) □ Подключить анализатор и убедиться в отсутствии ошибок □ Задокументировать все ID и значения данных ЗаключениеCAN Bus — это элегантное инженерное решение, выдержавшее испытание десятилетиями. Детерминизм без коллизий, встроенная обработка ошибок, устойчивость к помехам — всё это делает CAN первым выбором для распределённых систем управления с жёсткими требованиями к надёжности. Для старта: MCP2515 + Arduino даёт минимальный стенд за $5. SocketCAN на Raspberry Pi — бесплатный анализатор. PCAN-USB — профессиональный инструмент за разумные деньги. Знание CAN открывает двери в automotive-разработку, промышленную автоматизацию и встраиваемые системы. Это инвестиция, которая окупается.
Почему CAN Bus? История одного протокола1983 год. Инженеры Bosch смотрят на жгут проводки в Mercedes-Benz W126 и понимают, что так продолжаться не может. 1000+ метров провода, сотни коннекторов — система ненадёжна, дорога и тяжела. Им нужна шина данных, по которой все блоки управления могут общаться. В 1986 году появляется CAN (Controller Area Network). В 1991 году Mercedes внедряет CAN в S-класс. Сегодня нет ни одного автомобиля без CAN. И не только автомобиля: промышленные роботы, строительная техника, медицинское оборудование, поезда, самолёты. Секреты успеха: Надёжность — дифференциальный сигнал, устойчив к помехам Детерминизм — приоритетная схема без коллизий Простота — только 2 провода (CANH и CANL) Скорость — до 1 Мбит/с (Classic CAN), до 8 Мбит/с (CAN FD) Физический уровень: как это работаетCAN использует дифференциальную пару: два провода CANH и CANL. Информация кодируется разностью напряжений, а не абсолютным значением. Рецессивный бит (логическая 1): CANH ≈ 2.5В, CANL ≈ 2.5В → разность ≈ 0В Доминантный бит (логический 0): CANH ≈ 3.5В, CANL ≈ 1.5В → разность ≈ 2В Дифференциальный сигнал нечувствителен к синфазным помехам — если на оба провода наводится шум, разность остаётся неизменной. Именно поэтому CAN работает в двигательном отсеке автомобиля рядом с высоковольтной проводкой зажигания. ТопологияСтрого линейная шина с терминаторами 120 Ом на концах: [Узел A]──────[Узел B]──────[Узел C]──────[Узел D] 120Ом 120Ом Максимальная длина зависит от скорости: Скорость Макс. длина 1 Мбит/с 25 м 500 Кбит/с 100 м 250 Кбит/с 250 м 125 Кбит/с 500 м 10 Кбит/с 5000 м Структура CAN-фрейма (Standard 11-bit)SOF│ Identifier (11 бит) │RTR│IDE│r0│ DLC (4) │ Data (0-8 байт) │ CRC │ACK│ EOF 1 11 1 1 1 4 0-64 15 2 7 SOF (Start of Frame): 1 доминантный бит — все узлы синхронизируются. Identifier (ID, 11 бит): Идентифицирует тип сообщения, а не адрес отправителя/получателя. Одновременно определяет приоритет — чем меньше ID, тем выше приоритет. ID=0 — наивысший приоритет. RTR (Remote Transmission Request): Запрос данных от другого узла (редко используется). DLC (Data Length Code): Количество байт данных, 0–8. Data: Полезные данные, 0–8 байт. CRC (15 бит): Контрольная сумма для обнаружения ошибок. ACK: Все узлы, успешно принявшие фрейм, устанавливают доминантный бит в поле ACK. Отправитель проверяет — если ACK не получен, повторяет передачу. Extended Frame (29-bit ID)Для приложений где 2048 идентификаторов мало (J1939, CANopen): SOF│ ID_A (11) │SRR│IDE=1│ ID_B (18 бит) │RTR│... 29-битный ID даёт 536 870 912 возможных идентификаторов. Битовый арбитраж: без коллизийСамая элегантная часть CAN. Когда два узла начинают передачу одновременно — нет коллизии, как в Ethernet. Побеждает тот, у кого ID меньше (приоритетнее). Механизм: каждый передающий узел одновременно читает шину. Пока он видит то, что передаёт — продолжает. Как только видит расхождение (отправил рецессивный 1, а на шине доминантный 0 — значит другой узел передаёт доминантный бит с более высоким приоритетом) — немедленно прекращает передачу и переходит в режим приёма. Узел A: 0 0 0 1 0 ... (ID = 0b00010...) Узел B: 0 0 0 0 1 ... (ID = 0b00001...) Бит 4: Узел A передаёт рецессивный (1) Узел B передаёт доминантный (0) Шина показывает доминантный (0) → Узел A видит расхождение и ОСТАНАВЛИВАЕТСЯ → Узел B продолжает передачу Узел B выиграл арбитраж! Нет потерянных данных, нет задержек. Обработка ошибок и состояния узлаCAN имеет развитую систему самодиагностики. Каждый узел ведёт два счётчика: TEC (Transmit Error Counter) REC (Receive Error Counter) Состояния узла: Error Active (TEC<128, REC<128) — Нормальная работа ↓ TEC или REC ≥ 128 Error Passive (TEC≥128 или REC≥128) — Узел работает, но: - Не посылает Active Error Flags - Ждёт 8 рецессивных бит между передачами ↓ TEC ≥ 256 Bus Off — Узел ОТКЛЮЧЁН от шины (требует программного сброса или 128×11 рецессивных бит) Это важно: неисправный узел не "разваливает" шину, а сначала становится пассивным, затем отключается — остальные продолжают работать. STM32: встроенный CAN-контроллерSTM32F103 имеет встроенный bxCAN (Basic Extended CAN). Пины: PA11/PA12 или PB8/PB9. #include "stm32f1xx_hal.h" CAN_HandleTypeDef hcan; // ===== ИНИЦИАЛИЗАЦИЯ CAN 500 Кбит/с ===== void CAN_Init_500kbps(void) { hcan.Instance = CAN1; // Тайминг для 500 Кбит/с при тактовой 36 МГц // Bit time = Prescaler × (1 + BS1 + BS2) // 36 МГц / 4 / (1+7+2) = 900 Кбит/с ... нет, подберём: // 36 МГц / 9 / (1+3+2) = 500 Кбит/с ← правильно hcan.Init.Prescaler = 9; hcan.Init.Mode = CAN_MODE_NORMAL; // CAN_MODE_LOOPBACK для теста! hcan.Init.SyncJumpWidth = CAN_SJW_1TQ; hcan.Init.TimeSeg1 = CAN_BS1_3TQ; // BS1 = 3 TQ hcan.Init.TimeSeg2 = CAN_BS2_2TQ; // BS2 = 2 TQ hcan.Init.TimeTriggeredMode = DISABLE; hcan.Init.AutoBusOff = ENABLE; // Автоматический выход из Bus-Off hcan.Init.AutoWakeUp = DISABLE; hcan.Init.AutoRetransmission = ENABLE; // Автоповтор при ошибках hcan.Init.ReceiveFifoLocked = DISABLE; hcan.Init.TransmitFifoPriority= DISABLE; HAL_CAN_Init(&hcan); // ===== ФИЛЬТР ПРИЁМА ===== CAN_FilterTypeDef filter = {0}; // Принимать ВСЕ сообщения (маска 0 — все биты любые) filter.FilterBank = 0; filter.FilterMode = CAN_FILTERMODE_IDMASK; filter.FilterScale = CAN_FILTERSCALE_32BIT; filter.FilterIdHigh = 0x0000; filter.FilterIdLow = 0x0000; filter.FilterMaskIdHigh = 0x0000; // Маска 0 = принимать всё filter.FilterMaskIdLow = 0x0000; filter.FilterFIFOAssignment = CAN_RX_FIFO0; filter.FilterActivation = ENABLE; HAL_CAN_ConfigFilter(&hcan, &filter); // Активировать прерывания приёма HAL_CAN_ActivateNotification(&hcan, CAN_IT_RX_FIFO0_MSG_PENDING); HAL_CAN_Start(&hcan); } // ===== ОТПРАВКА СООБЩЕНИЯ ===== HAL_StatusTypeDef CAN_SendMessage(uint32_t id, uint8_t *data, uint8_t len) { CAN_TxHeaderTypeDef txHeader; uint32_t txMailbox; txHeader.StdId = id; // 11-битный ID txHeader.ExtId = 0; txHeader.IDE = CAN_ID_STD; txHeader.RTR = CAN_RTR_DATA; txHeader.DLC = len; txHeader.TransmitGlobalTime = DISABLE; return HAL_CAN_AddTxMessage(&hcan, &txHeader, data, &txMailbox); } // ===== ПРИЁМ ЧЕРЕЗ ПРЕРЫВАНИЕ ===== void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan_ptr) { CAN_RxHeaderTypeDef rxHeader; uint8_t rxData[8]; if (HAL_CAN_GetRxMessage(hcan_ptr, CAN_RX_FIFO0, &rxHeader, rxData) == HAL_OK) { uint32_t id = (rxHeader.IDE == CAN_ID_STD) ? rxHeader.StdId : rxHeader.ExtId; // Обработка по ID switch (id) { case 0x100: // Состояние узла 1 process_node1_status(rxData, rxHeader.DLC); break; case 0x200: // Измерения температуры process_temperature_data(rxData, rxHeader.DLC); break; default: // Неизвестное сообщение break; } } } // Пример обработки температурных данных // Договорённость: 2 байта = температура × 10 (signed) void process_temperature_data(uint8_t *data, uint8_t len) { if (len < 2) return; int16_t raw = (int16_t)((data[0] << 8) | data[1]); float temperature = raw / 10.0f; if (temperature > 80.0f) { // Высокая температура — принять меры activate_cooling(); } } // ===== ПРИМЕР: ПЕРИОДИЧЕСКАЯ ОТПРАВКА ДАННЫХ УЗЛА ===== void CAN_SendNodeStatus(void) { uint8_t data[8]; // Байт 0: статусные биты data[0] = 0x00; if (motor_running) data[0] |= 0x01; if (fault_active) data[0] |= 0x02; if (io_ready) data[0] |= 0x04; // Байты 1-2: скорость двигателя (об/мин × 10, unsigned) uint16_t speed_raw = (uint16_t)(motor_speed_rpm * 10.0f); data[1] = speed_raw >> 8; data[2] = speed_raw & 0xFF; // Байты 3-4: ток (А × 100, signed) int16_t current_raw = (int16_t)(motor_current_a * 100.0f); data[3] = current_raw >> 8; data[4] = current_raw & 0xFF; // Байты 5-6: температура (°C × 10, signed) int16_t temp_raw = (int16_t)(temperature_c * 10.0f); data[5] = temp_raw >> 8; data[6] = temp_raw & 0xFF; // Байт 7: номер пакета (для обнаружения потерь) static uint8_t packet_num = 0; data[7] = packet_num++; CAN_SendMessage(0x100, data, 8); } Arduino + MCP2515: добавляем CANArduino не имеет встроенного CAN. Используем MCP2515 — внешний CAN-контроллер с SPI. #include <SPI.h> #include <mcp2515.h> // Библиотека arduino-mcp2515 MCP2515 mcp2515(10); // CS pin struct can_frame rxMsg, txMsg; void setup() { Serial.begin(115200); SPI.begin(); mcp2515.reset(); mcp2515.setBitrate(CAN_500KBPS, MCP_8MHZ); // 500 Кбит/с, кварц 8 МГц mcp2515.setNormalMode(); // или setLoopbackMode() для теста без шины Serial.println("CAN Bus Ready"); } // Отправка измерений температуры void sendTemperature(float temp_celsius) { txMsg.can_id = 0x200; // ID нашего сообщения txMsg.can_dlc = 2; // 2 байта данных // Упаковываем: температура × 10, int16 int16_t raw = (int16_t)(temp_celsius * 10.0f); txMsg.data[0] = raw >> 8; txMsg.data[1] = raw & 0xFF; mcp2515.sendMessage(&txMsg); } void loop() { // Приём сообщений if (mcp2515.readMessage(&rxMsg) == MCP2515::ERROR_OK) { Serial.print("ID: 0x"); Serial.print(rxMsg.can_id, HEX); Serial.print(", DLC: "); Serial.print(rxMsg.can_dlc); Serial.print(", Data: "); for (int i = 0; i < rxMsg.can_dlc; i++) { Serial.print("0x"); Serial.print(rxMsg.data[i], HEX); Serial.print(" "); } Serial.println(); // Обработка сообщения статуса узла if (rxMsg.can_id == 0x100 && rxMsg.can_dlc >= 3) { bool running = rxMsg.data[0] & 0x01; bool fault = rxMsg.data[0] & 0x02; uint16_t speed_raw = (rxMsg.data[1] << 8) | rxMsg.data[2]; float speed = speed_raw / 10.0f; Serial.print("Узел 1: "); Serial.print(running ? "Работает" : "Стоит"); if (fault) Serial.print(" [АВАРИЯ]"); Serial.print(", Скорость: "); Serial.print(speed); Serial.println(" об/мин"); } } // Отправка своих данных каждые 100 мс static uint32_t lastSend = 0; if (millis() - lastSend >= 100) { lastSend = millis(); float temp = 25.0f + analogRead(A0) * 0.05f; sendTemperature(temp); } } Linux SocketCAN: мощный инструментарийНа Linux (Raspberry Pi, промышленные PC) CAN работает через SocketCAN — часть ядра с 2009 года. # Настройка CAN интерфейса # Если есть USB-CAN адаптер (Peak PCAN, Kvaser, SeedStudio) sudo ip link set can0 up type can bitrate 500000 # Или через модуль ядра для MCP2515 на Raspberry Pi # /boot/config.txt: # dtoverlay=mcp2515-can0,oscillator=8000000,interrupt=25 # Просмотр трафика candump can0 # Отправка сообщения: ID=0x100, 3 байта cansend can0 100#010203 # Фильтрация - только ID 0x100-0x1FF candump can0 100~1FF # Статистика ошибок ip -details -statistics link show can0 # Python + python-can # pip install python-can import can import struct import time # Создаём интерфейс bus = can.interface.Bus(channel='can0', bustype='socketcan') # Отправка def send_temperature(temp: float): raw = struct.pack('>h', int(temp * 10)) # big-endian signed short msg = can.Message(arbitration_id=0x200, data=raw, is_extended_id=False) bus.send(msg) # Приём с фильтрацией по ID bus.set_filters([ {"can_id": 0x100, "can_mask": 0x7FF, "extended": False}, # Только 0x100 {"can_id": 0x200, "can_mask": 0x7FF, "extended": False}, # И 0x200 ]) print("Ожидаем CAN-сообщения...") for msg in bus: if msg.arbitration_id == 0x100: status = msg.data[0] speed = struct.unpack('>H', bytes(msg.data[1:3]))[0] / 10.0 current = struct.unpack('>h', bytes(msg.data[3:5]))[0] / 100.0 temp = struct.unpack('>h', bytes(msg.data[5:7]))[0] / 10.0 print(f"Узел 100: {'Работает' if status & 1 else 'Стоит'}, " f"n={speed} об/мин, I={current}А, T={temp}°C") Протоколы высшего уровняJ1939 — для грузовой техники и дизелейJ1939 — стандарт SAE для коммуникации в коммерческом транспорте и тяжёлой технике. Работает поверх CAN с 29-битными ID. Структура J1939 ID (29 бит): Приоритет (3б) │ Reserved (1б) │ Data Page (1б) │ PGN (8б) │ Source Address (8б) Популярные PGN (Parameter Group Number): PGN 0xF004 (EEC1) — данные двигателя: обороты, момент, нагрузка PGN 0xFEF1 (CCVS) — скорость, круиз-контроль PGN 0xFEE5 (HOURS) — моточасы PGN 0xFEE6 (TIME) — время и дата CANopen — для промышленной автоматизацииCANopen — стандарт для промышленного оборудования: частотники, серводрайвы, I/O модули. Определяет: Словарь объектов (Object Dictionary) — структурированное хранилище всех параметров устройства PDO (Process Data Object) — быстрая передача данных реального времени (заменяет аналог 4-20мА) SDO (Service Data Object) — медленная конфигурация и чтение параметров NMT (Network Management) — управление состоянием узлов Heartbeat / Node Guarding — контроль жизнеспособности узлов Пример: частотник с CANopen. Через SDO читаем/пишем параметры (коэффициент разгона, макс. частота). Через PDO каждые 10 мс обмениваемся уставкой и текущими значениями. Диагностика сети CANПризнаки проблем:Симптом Вероятная причина Bus Off у одного узла Неисправный узел, помехи на кабеле Много ошибок CRC Неправильный биттайминг, плохая линия Узел не видит свои сообщения в ACK Он один на шине, некому подтверждать Периодические потери сообщений Нет терминаторов или два на одном конце Все узлы в Bus Off Неисправная нагрузка на шине Инструменты:PEAK PCAN-USB (~€80) + PCAN-View (бесплатно) — лучший бюджетный вариант Kvaser Leaf Light — популярен с CANalyzer Vector CANalyzer — профессиональный инструмент для автомобильных применений Linux candump / cansniffer — бесплатно, для socketcan-интерфейсов Wireshark с плагином SocketCAN — анализ на Linux CAN FD: следующее поколениеCAN FD (Flexible Data-rate) — развитие стандарта 2012 года. Нет обратной совместимости на физическом уровне, но концептуально тот же подход. Отличия от Classic CAN: До 64 байт данных в одном фрейме (против 8) До 8 Мбит/с в поле данных (при сохранении 1 Мбит/с для арбитража) Обязательная CRC 21-бит для надёжности при высоких скоростях CAN FD активно внедряется в новых автомобилях (все автомобили с AUTOSAR) и промышленной автоматизации. STM32G4, STM32H7 имеют встроенный FDCAN-контроллер. Практический чеклист для CAN-системы□ Терминаторы 120 Ом на ОБОИХ концах шины (и только там) □ Экранированная витая пара (для помехонагруженных сред) □ Максимальная длина ответвлений (stub) < 0.3 м □ Все узлы имеют ОДИНАКОВУЮ скорость и биттайминг □ Адреса узлов (если используются) уникальны □ Заземление: один общий провод + заземление экрана в одной точке □ Проверить напряжение CANH/CANL (рецесс.: оба ~2.5В, домин.: разность ~2В) □ Подключить анализатор и убедиться в отсутствии ошибок □ Задокументировать все ID и значения данных ЗаключениеCAN Bus — это элегантное инженерное решение, выдержавшее испытание десятилетиями. Детерминизм без коллизий, встроенная обработка ошибок, устойчивость к помехам — всё это делает CAN первым выбором для распределённых систем управления с жёсткими требованиями к надёжности. Для старта: MCP2515 + Arduino даёт минимальный стенд за $5. SocketCAN на Raspberry Pi — бесплатный анализатор. PCAN-USB — профессиональный инструмент за разумные деньги. Знание CAN открывает двери в automotive-разработку, промышленную автоматизацию и встраиваемые системы. Это инвестиция, которая окупается. -
 IIoT: не просто модное словоПромышленный IoT (IIoT — Industrial Internet of Things) — это не умный чайник и не фитнес-браслет. Это системы, которые собирают данные с реального производственного оборудования, анализируют их и помогают принимать решения. Реальный кейс: завод по производству подшипников. Раньше плановое ТО каждые 3 месяца — меняли подшипники в редукторах "по графику". После внедрения IIoT (вибродатчики на каждом редукторе + MQTT + аналитика): 30% редукторов работали нормально и менялись зря, 5% уже имели износ и могли выйти из строя раньше графика. Экономия на расходниках — 28%, аварийных остановок из-за поломки — минус 4 в год. Это и есть предиктивное обслуживание. И начинается оно с правильного сбора данных. Архитектура IIoT-системыУровень 0 — Полевые устройства: Датчики (температура, вибрация, давление, ток) Исполнительные механизмы Уровень 1 — Агрегаторы / Граничные узлы (Edge): ESP32, Raspberry Pi, промышленные шлюзы Протоколы: Modbus, 1-Wire, I2C, SPI, 4-20мА Уровень 2 — Брокер сообщений: MQTT Broker (Mosquitto, EMQX, HiveMQ) Нормализация данных, маршрутизация Уровень 3 — Обработка и хранение: Node-RED / Python — логика, алармы InfluxDB / TimescaleDB — временные ряды PostgreSQL — конфигурация, справочники Уровень 4 — Визуализация и аналитика: Grafana — дашборды, алерты Jupyter Notebook — анализ данных ML модели — предиктивная аналитика MQTT: почему именно онMQTT (Message Queuing Telemetry Transport) — лёгкий протокол публикации/подписки, разработанный IBM в 1999 году для телеметрии нефтепроводов через спутник. Идеален для IoT: Лёгкий: заголовок всего 2 байта, работает при 2G-соединении Асинхронный: устройства не опрашиваются, а сами публикуют данные QoS (Quality of Service): три уровня надёжности доставки Retain: брокер хранит последнее значение, новые подписчики сразу его получают Last Will: автоматическое сообщение при потере связи с устройством Уровни QoS:QoS 0 (At most once): Отправил и забыл. Быстро, но сообщение может потеряться. Для частых нечувствительных данных (телеметрия каждую секунду). QoS 1 (At least once): Гарантированная доставка, но возможны дубликаты. Для алармов и важных событий. QoS 2 (Exactly once): Ровно один раз. Медленнее, для критичных команд управления. Структура топиков (best practices):factory/ ← Завод ├── line1/ ← Производственная линия 1 │ ├── conveyor1/ ← Конвейер 1 │ │ ├── telemetry ← Данные датчиков (JSON, часто) │ │ ├── status ← Состояние (работает/стоит) │ │ ├── alarms ← Аварии │ │ └── commands ← Команды управления │ └── robot1/ │ └── telemetry └── utilities/ ├── compressor1/ │ └── telemetry └── hvac/ └── telemetry Примеры топиков: factory/line1/conveyor1/telemetry factory/line1/robot1/status factory/+/+/alarms ← Подписка на все аварии всей линии 1 factory/# ← Подписка на ВСЁ (осторожно!) Установка и настройка Mosquitto# Ubuntu/Debian sudo apt update sudo apt install mosquitto mosquitto-clients # Конфигурация /etc/mosquitto/mosquitto.conf: listener 1883 allow_anonymous false password_file /etc/mosquitto/passwd # TLS (обязательно для производства!): listener 8883 cafile /etc/ssl/certs/ca-certificates.crt certfile /etc/mosquitto/certs/server.crt keyfile /etc/mosquitto/certs/server.key require_certificate false # WebSocket для Node-RED и браузерных клиентов: listener 9001 protocol websockets # Логирование: log_dest file /var/log/mosquitto/mosquitto.log log_type all # Создание пользователя: sudo mosquitto_passwd -c /etc/mosquitto/passwd username sudo systemctl enable mosquitto sudo systemctl start mosquitto # Тест: mosquitto_sub -h localhost -u user -P pass -t "factory/#" -v & mosquitto_pub -h localhost -u user -P pass -t "factory/test" -m "hello" ESP32: узел сбора данныхESP32 — идеальный Edge-узел: WiFi/BT, 240 МГц, 520 КБ RAM, куча периферии, цена $3–5. #include <WiFi.h> #include <PubSubClient.h> #include <ArduinoJson.h> #include <Wire.h> #include "Adafruit_BME280.h" // ===== КОНФИГУРАЦИЯ ===== const char* WIFI_SSID = "Factory_WiFi"; const char* WIFI_PASSWORD = "secretpass"; const char* MQTT_SERVER = "192.168.1.100"; const int MQTT_PORT = 1883; const char* MQTT_USER = "esp32_node1"; const char* MQTT_PASS = "nodepass"; const char* DEVICE_ID = "conveyor1"; // Топики const char* TOPIC_TELEMETRY = "factory/line1/conveyor1/telemetry"; const char* TOPIC_STATUS = "factory/line1/conveyor1/status"; const char* TOPIC_ALARMS = "factory/line1/conveyor1/alarms"; const char* TOPIC_COMMANDS = "factory/line1/conveyor1/commands"; const char* TOPIC_WILL = "factory/line1/conveyor1/status"; WiFiClient espClient; PubSubClient mqtt(espClient); Adafruit_BME280 bme; // Состояние bool motorRunning = false; float setpoint = 50.0f; uint32_t lastPublish = 0; uint32_t uptime_sec = 0; // ===== ПОДКЛЮЧЕНИЕ ===== void connectWiFi() { WiFi.begin(WIFI_SSID, WIFI_PASSWORD); Serial.print("WiFi..."); while (WiFi.status() != WL_CONNECTED) { delay(500); Serial.print("."); } Serial.println(" OK"); Serial.println(WiFi.localIP()); } void connectMQTT() { while (!mqtt.connected()) { Serial.print("MQTT..."); // Last Will & Testament — сообщение при потере связи const char* willMsg = "{\"online\":false}"; if (mqtt.connect(DEVICE_ID, MQTT_USER, MQTT_PASS, TOPIC_WILL, 1, true, willMsg)) { Serial.println(" OK"); // Сообщение о подключении mqtt.publish(TOPIC_STATUS, "{\"online\":true}", true); // Подписываемся на команды mqtt.subscribe(TOPIC_COMMANDS, 1); // QoS 1 } else { Serial.printf(" Ошибка: %d\n", mqtt.state()); delay(5000); } } } // ===== ОБРАБОТКА КОМАНД ===== void mqttCallback(char* topic, byte* payload, unsigned int length) { // Парсим JSON команду StaticJsonDocument<256> doc; DeserializationError error = deserializeJson(doc, payload, length); if (error) { Serial.println("JSON error"); return; } String topicStr = String(topic); if (topicStr == TOPIC_COMMANDS) { // Команда пуск/стоп if (doc.containsKey("run")) { motorRunning = doc["run"].as<bool>(); Serial.printf("Команда: %s\n", motorRunning ? "ПУСК" : "СТОП"); } // Изменение уставки if (doc.containsKey("setpoint")) { setpoint = doc["setpoint"].as<float>(); Serial.printf("Уставка: %.1f\n", setpoint); } // Сброс аварии if (doc["reset_alarm"].as<bool>()) { Serial.println("Сброс аварии"); } } } // ===== ПУБЛИКАЦИЯ ДАННЫХ ===== void publishTelemetry() { // Читаем датчики float temperature = bme.readTemperature(); float humidity = bme.readHumidity(); float pressure = bme.readPressure() / 100.0f; int current_raw = analogRead(34); // 4-20мА через ACS712 float current_a = current_raw * 25.0f / 4095.0f; // 0-25А // Формируем JSON StaticJsonDocument<512> doc; doc["device_id"] = DEVICE_ID; doc["timestamp"] = millis() / 1000; doc["uptime"] = uptime_sec; doc["running"] = motorRunning; doc["setpoint"] = setpoint; JsonObject sensors = doc.createNestedObject("sensors"); sensors["temperature"] = round(temperature * 10) / 10.0; sensors["humidity"] = round(humidity * 10) / 10.0; sensors["pressure"] = round(pressure * 10) / 10.0; sensors["current"] = round(current_a * 100) / 100.0; // Диагностика устройства JsonObject diag = doc.createNestedObject("diagnostics"); diag["wifi_rssi"] = WiFi.RSSI(); diag["free_heap"] = ESP.getFreeHeap(); diag["cpu_freq"] = ESP.getCpuFreqMHz(); // Сериализация и публикация char payload[512]; serializeJson(doc, payload); mqtt.publish(TOPIC_TELEMETRY, payload, false); // QoS 0, не retain // Проверка алармов if (temperature > 80.0f) { StaticJsonDocument<128> alarm; alarm["type"] = "high_temperature"; alarm["value"] = temperature; alarm["limit"] = 80.0f; alarm["message"] = "Превышена температура двигателя!"; char alarmPayload[128]; serializeJson(alarm, alarmPayload); mqtt.publish(TOPIC_ALARMS, alarmPayload, true); // retain = true } } // ===== SETUP / LOOP ===== void setup() { Serial.begin(115200); Wire.begin(21, 22); if (!bme.begin(0x76)) { Serial.println("BME280 не найден!"); } connectWiFi(); mqtt.setServer(MQTT_SERVER, MQTT_PORT); mqtt.setCallback(mqttCallback); mqtt.setBufferSize(1024); // Увеличиваем буфер для больших сообщений connectMQTT(); } void loop() { // Переподключение при потере связи if (!mqtt.connected()) { if (WiFi.status() != WL_CONNECTED) { connectWiFi(); } connectMQTT(); } mqtt.loop(); // Публикация каждые 5 секунд if (millis() - lastPublish >= 5000) { lastPublish = millis(); uptime_sec += 5; publishTelemetry(); } } Python: обработка и алармыimport paho.mqtt.client as mqtt import json import time from datetime import datetime from influxdb_client import InfluxDBClient, Point from influxdb_client.client.write_api import SYNCHRONOUS # ===== КОНФИГУРАЦИЯ ===== MQTT_BROKER = "192.168.1.100" MQTT_PORT = 1883 MQTT_USER = "backend" MQTT_PASS = "backendpass" INFLUX_URL = "http://localhost:8086" INFLUX_TOKEN = "your-influx-token" INFLUX_ORG = "factory" INFLUX_BUCKET = "telemetry" # ===== ИНИЦИАЛИЗАЦИЯ ===== influx_client = InfluxDBClient(url=INFLUX_URL, token=INFLUX_TOKEN, org=INFLUX_ORG) write_api = influx_client.write_api(write_options=SYNCHRONOUS) # Состояние алармов (дедупликация) active_alarms = {} def on_message(client, userdata, msg): topic = msg.topic try: data = json.loads(msg.payload.decode()) except json.JSONDecodeError: print(f"Ошибка JSON в топике {topic}") return # Маршрутизация по топику if "/telemetry" in topic: handle_telemetry(topic, data) elif "/alarms" in topic: handle_alarm(topic, data) elif "/status" in topic: handle_status(topic, data) def handle_telemetry(topic: str, data: dict): """Запись телеметрии в InfluxDB""" # Извлекаем путь устройства из топика # factory/line1/conveyor1/telemetry → ['factory', 'line1', 'conveyor1', 'telemetry'] parts = topic.split('/') if len(parts) < 4: return location = parts[1] # line1 device = parts[2] # conveyor1 sensors = data.get('sensors', {}) # Формируем точку данных для InfluxDB point = ( Point("telemetry") .tag("location", location) .tag("device", device) .tag("device_id", data.get('device_id', device)) .field("temperature", float(sensors.get('temperature', 0))) .field("humidity", float(sensors.get('humidity', 0))) .field("pressure", float(sensors.get('pressure', 0))) .field("current", float(sensors.get('current', 0))) .field("running", int(data.get('running', False))) .field("wifi_rssi", int(data.get('diagnostics', {}).get('wifi_rssi', 0))) ) try: write_api.write(bucket=INFLUX_BUCKET, record=point) except Exception as e: print(f"InfluxDB ошибка: {e}") # Проверка пороговых значений temp = sensors.get('temperature', 0) if temp > 85.0: send_alert(device, "critical", f"Критическая температура: {temp}°C") elif temp > 75.0: send_alert(device, "warning", f"Высокая температура: {temp}°C") def handle_alarm(topic: str, data: dict): """Обработка аларм-сообщений от устройства""" parts = topic.split('/') device = parts[2] if len(parts) >= 3 else "unknown" alarm_type = data.get('type', 'unknown') alarm_key = f"{device}_{alarm_type}" # Дедупликация: не спамим одинаковые алармы now = time.time() if alarm_key in active_alarms: if now - active_alarms[alarm_key] < 300: # 5 минут return active_alarms[alarm_key] = now print(f"🚨 АВАРИЯ [{device}]: {data.get('message', alarm_type)}") # Здесь можно добавить отправку в Telegram, email, SMS send_notification( f"⚠️ Авария на {device}\n" f"Тип: {alarm_type}\n" f"Значение: {data.get('value', 'N/A')}\n" f"Время: {datetime.now().strftime('%H:%M:%S')}" ) def handle_status(topic: str, data: dict): """Отслеживание онлайн/офлайн устройств""" parts = topic.split('/') device = parts[2] if len(parts) >= 3 else "unknown" online = data.get('online', False) print(f"{'🟢' if online else '🔴'} {device}: {'онлайн' if online else 'офлайн'}") if not online: send_alert(device, "critical", f"Устройство {device} потеряло связь!") def send_alert(device: str, level: str, message: str): """Отправка алерта (пример — в лог)""" timestamp = datetime.now().strftime("%Y-%m-%d %H:%M:%S") print(f"[{timestamp}] {level.upper()} [{device}]: {message}") def send_notification(text: str): """Здесь интеграция с Telegram Bot API""" # import requests # requests.post(f"https://api.telegram.org/bot{TOKEN}/sendMessage", # json={"chat_id": CHAT_ID, "text": text}) print(f"NOTIFICATION: {text}") # ===== ЗАПУСК ===== client = mqtt.Client(client_id="backend_processor") client.username_pw_set(MQTT_USER, MQTT_PASS) client.on_message = on_message client.connect(MQTT_BROKER, MQTT_PORT, 60) client.subscribe("factory/#", qos=1) # Подписка на всё print("Backend запущен, ожидаем данные...") client.loop_forever() InfluxDB + Grafana: красивые дашбордыУстановка через Docker Compose:# docker-compose.yml version: '3.8' services: mosquitto: image: eclipse-mosquitto:2 ports: - "1883:1883" - "9001:9001" volumes: - ./mosquitto/config:/mosquitto/config - mosquitto_data:/mosquitto/data influxdb: image: influxdb:2.7 ports: - "8086:8086" environment: DOCKER_INFLUXDB_INIT_MODE: setup DOCKER_INFLUXDB_INIT_USERNAME: admin DOCKER_INFLUXDB_INIT_PASSWORD: secretpassword DOCKER_INFLUXDB_INIT_ORG: factory DOCKER_INFLUXDB_INIT_BUCKET: telemetry DOCKER_INFLUXDB_INIT_RETENTION: 30d # Хранение 30 дней volumes: - influxdb_data:/var/lib/influxdb2 grafana: image: grafana/grafana:latest ports: - "3000:3000" environment: GF_SECURITY_ADMIN_PASSWORD: grafanapass GF_PLUGINS_ALLOW_LOADING_UNSIGNED_PLUGINS: "yesoreyeram-infinity-datasource" volumes: - grafana_data:/var/lib/grafana depends_on: - influxdb node-red: image: nodered/node-red:latest ports: - "1880:1880" volumes: - nodered_data:/data volumes: mosquitto_data: influxdb_data: grafana_data: nodered_data: Flux-запрос в Grafana (температура за последний час):from(bucket: "telemetry") |> range(start: -1h) |> filter(fn: (r) => r._measurement == "telemetry") |> filter(fn: (r) => r._field == "temperature") |> filter(fn: (r) => r.device == "conveyor1") |> aggregateWindow(every: 1m, fn: mean, createEmpty: false) |> yield(name: "mean_temperature") Предиктивная аналитика: пример с вибрациейimport numpy as np from scipy.fft import fft, fftfreq from scipy.stats import zscore def analyze_vibration(samples: list, sample_rate: int = 1000) -> dict: """ Анализ вибрации для обнаружения износа подшипников. samples: список отсчётов акселерометра sample_rate: частота дискретизации, Гц """ data = np.array(samples, dtype=float) n = len(data) # Временные характеристики rms = np.sqrt(np.mean(data**2)) # Эффективное значение (RMS) peak = np.max(np.abs(data)) # Пиковое значение crest = peak / rms if rms > 0 else 0 # Пик-фактор (norma: 1.4–2.5, износ: >4) kurtosis = float(np.mean((data - np.mean(data))**4) / (np.std(data)**4 + 1e-10)) # Спектральный анализ (FFT) spectrum = np.abs(fft(data))[:n//2] freqs = fftfreq(n, 1.0 / sample_rate)[:n//2] # Поиск доминирующих частот top_indices = np.argsort(spectrum)[-5:][::-1] dominant_freqs = [(float(freqs[i]), float(spectrum[i])) for i in top_indices] # Оценка состояния # Crest Factor: <2.5 — норма, 2.5–4 — внимание, >4 — износ # Kurtosis: <3 — норма (гауссов шум), >6 — дефект (удары) if crest > 4.0 or kurtosis > 6.0: status = "FAULT" recommendation = "Замените подшипник в течение 48 часов" elif crest > 2.5 or kurtosis > 4.5: status = "WARNING" recommendation = "Запланируйте замену при следующем ТО" else: status = "OK" recommendation = "Оборудование в норме" return { 'rms': round(rms, 4), 'peak': round(peak, 4), 'crest_factor': round(crest, 2), 'kurtosis': round(kurtosis, 2), 'dominant_freqs': dominant_freqs[:3], 'status': status, 'recommendation': recommendation, } # Пример использования с MQTT: def on_vibration_data(client, userdata, msg): data = json.loads(msg.payload) samples = data['samples'] device = data['device_id'] analysis = analyze_vibration(samples, sample_rate=data.get('sample_rate', 1000)) # Публикуем результат анализа result_topic = f"factory/analytics/{device}/bearing_health" client.publish(result_topic, json.dumps(analysis), retain=True) if analysis['status'] != 'OK': print(f"⚠️ {device}: {analysis['recommendation']}") # Отправить уведомление... Безопасность IIoTЭто не опционально. Промышленные системы с интернет-подключением — лакомая цель для атак. Минимальный стандарт: TLS везде — Mosquitto с сертификатами, никакого plaintext Аутентификация — уникальный логин/пароль для каждого устройства, или X.509 сертификаты Авторизация по ACL — устройство conveyor1 пишет только в factory/line1/conveyor1/#, не может читать чужие команды Сегментация сети — IoT-устройства в отдельном VLAN, без прямого доступа в интернет OTA-обновления — возможность удалённого обновления прошивки при обнаружении уязвимостей Мониторинг аномалий — необычное количество сообщений, соединения с нестандартных IP # Mosquitto ACL файл /etc/mosquitto/acl: # Устройство conveyor1 — пишет только в свои топики user esp32_conveyor1 topic write factory/line1/conveyor1/+ topic read factory/line1/conveyor1/commands # Backend — читает всё, пишет команды user backend topic readwrite factory/# ЗаключениеIIoT с MQTT — это доступная и проверенная технология, которую можно внедрить даже на небольшом предприятии с минимальными затратами. ESP32 + Mosquitto + InfluxDB + Grafana — весь стек работает на одном Raspberry Pi 4 или бюджетном сервере. Главные принципы: данные должны быть точными (правильная калибровка датчиков), надёжными (QoS, переподключение, buffering), безопасными (TLS, ACL) и полезными (не просто собирать, а анализировать и действовать). Начните с малого: один датчик температуры, один MQTT-брокер, один Grafana-дашборд. После первого успешного графика желание расширять систему появится само.
IIoT: не просто модное словоПромышленный IoT (IIoT — Industrial Internet of Things) — это не умный чайник и не фитнес-браслет. Это системы, которые собирают данные с реального производственного оборудования, анализируют их и помогают принимать решения. Реальный кейс: завод по производству подшипников. Раньше плановое ТО каждые 3 месяца — меняли подшипники в редукторах "по графику". После внедрения IIoT (вибродатчики на каждом редукторе + MQTT + аналитика): 30% редукторов работали нормально и менялись зря, 5% уже имели износ и могли выйти из строя раньше графика. Экономия на расходниках — 28%, аварийных остановок из-за поломки — минус 4 в год. Это и есть предиктивное обслуживание. И начинается оно с правильного сбора данных. Архитектура IIoT-системыУровень 0 — Полевые устройства: Датчики (температура, вибрация, давление, ток) Исполнительные механизмы Уровень 1 — Агрегаторы / Граничные узлы (Edge): ESP32, Raspberry Pi, промышленные шлюзы Протоколы: Modbus, 1-Wire, I2C, SPI, 4-20мА Уровень 2 — Брокер сообщений: MQTT Broker (Mosquitto, EMQX, HiveMQ) Нормализация данных, маршрутизация Уровень 3 — Обработка и хранение: Node-RED / Python — логика, алармы InfluxDB / TimescaleDB — временные ряды PostgreSQL — конфигурация, справочники Уровень 4 — Визуализация и аналитика: Grafana — дашборды, алерты Jupyter Notebook — анализ данных ML модели — предиктивная аналитика MQTT: почему именно онMQTT (Message Queuing Telemetry Transport) — лёгкий протокол публикации/подписки, разработанный IBM в 1999 году для телеметрии нефтепроводов через спутник. Идеален для IoT: Лёгкий: заголовок всего 2 байта, работает при 2G-соединении Асинхронный: устройства не опрашиваются, а сами публикуют данные QoS (Quality of Service): три уровня надёжности доставки Retain: брокер хранит последнее значение, новые подписчики сразу его получают Last Will: автоматическое сообщение при потере связи с устройством Уровни QoS:QoS 0 (At most once): Отправил и забыл. Быстро, но сообщение может потеряться. Для частых нечувствительных данных (телеметрия каждую секунду). QoS 1 (At least once): Гарантированная доставка, но возможны дубликаты. Для алармов и важных событий. QoS 2 (Exactly once): Ровно один раз. Медленнее, для критичных команд управления. Структура топиков (best practices):factory/ ← Завод ├── line1/ ← Производственная линия 1 │ ├── conveyor1/ ← Конвейер 1 │ │ ├── telemetry ← Данные датчиков (JSON, часто) │ │ ├── status ← Состояние (работает/стоит) │ │ ├── alarms ← Аварии │ │ └── commands ← Команды управления │ └── robot1/ │ └── telemetry └── utilities/ ├── compressor1/ │ └── telemetry └── hvac/ └── telemetry Примеры топиков: factory/line1/conveyor1/telemetry factory/line1/robot1/status factory/+/+/alarms ← Подписка на все аварии всей линии 1 factory/# ← Подписка на ВСЁ (осторожно!) Установка и настройка Mosquitto# Ubuntu/Debian sudo apt update sudo apt install mosquitto mosquitto-clients # Конфигурация /etc/mosquitto/mosquitto.conf: listener 1883 allow_anonymous false password_file /etc/mosquitto/passwd # TLS (обязательно для производства!): listener 8883 cafile /etc/ssl/certs/ca-certificates.crt certfile /etc/mosquitto/certs/server.crt keyfile /etc/mosquitto/certs/server.key require_certificate false # WebSocket для Node-RED и браузерных клиентов: listener 9001 protocol websockets # Логирование: log_dest file /var/log/mosquitto/mosquitto.log log_type all # Создание пользователя: sudo mosquitto_passwd -c /etc/mosquitto/passwd username sudo systemctl enable mosquitto sudo systemctl start mosquitto # Тест: mosquitto_sub -h localhost -u user -P pass -t "factory/#" -v & mosquitto_pub -h localhost -u user -P pass -t "factory/test" -m "hello" ESP32: узел сбора данныхESP32 — идеальный Edge-узел: WiFi/BT, 240 МГц, 520 КБ RAM, куча периферии, цена $3–5. #include <WiFi.h> #include <PubSubClient.h> #include <ArduinoJson.h> #include <Wire.h> #include "Adafruit_BME280.h" // ===== КОНФИГУРАЦИЯ ===== const char* WIFI_SSID = "Factory_WiFi"; const char* WIFI_PASSWORD = "secretpass"; const char* MQTT_SERVER = "192.168.1.100"; const int MQTT_PORT = 1883; const char* MQTT_USER = "esp32_node1"; const char* MQTT_PASS = "nodepass"; const char* DEVICE_ID = "conveyor1"; // Топики const char* TOPIC_TELEMETRY = "factory/line1/conveyor1/telemetry"; const char* TOPIC_STATUS = "factory/line1/conveyor1/status"; const char* TOPIC_ALARMS = "factory/line1/conveyor1/alarms"; const char* TOPIC_COMMANDS = "factory/line1/conveyor1/commands"; const char* TOPIC_WILL = "factory/line1/conveyor1/status"; WiFiClient espClient; PubSubClient mqtt(espClient); Adafruit_BME280 bme; // Состояние bool motorRunning = false; float setpoint = 50.0f; uint32_t lastPublish = 0; uint32_t uptime_sec = 0; // ===== ПОДКЛЮЧЕНИЕ ===== void connectWiFi() { WiFi.begin(WIFI_SSID, WIFI_PASSWORD); Serial.print("WiFi..."); while (WiFi.status() != WL_CONNECTED) { delay(500); Serial.print("."); } Serial.println(" OK"); Serial.println(WiFi.localIP()); } void connectMQTT() { while (!mqtt.connected()) { Serial.print("MQTT..."); // Last Will & Testament — сообщение при потере связи const char* willMsg = "{\"online\":false}"; if (mqtt.connect(DEVICE_ID, MQTT_USER, MQTT_PASS, TOPIC_WILL, 1, true, willMsg)) { Serial.println(" OK"); // Сообщение о подключении mqtt.publish(TOPIC_STATUS, "{\"online\":true}", true); // Подписываемся на команды mqtt.subscribe(TOPIC_COMMANDS, 1); // QoS 1 } else { Serial.printf(" Ошибка: %d\n", mqtt.state()); delay(5000); } } } // ===== ОБРАБОТКА КОМАНД ===== void mqttCallback(char* topic, byte* payload, unsigned int length) { // Парсим JSON команду StaticJsonDocument<256> doc; DeserializationError error = deserializeJson(doc, payload, length); if (error) { Serial.println("JSON error"); return; } String topicStr = String(topic); if (topicStr == TOPIC_COMMANDS) { // Команда пуск/стоп if (doc.containsKey("run")) { motorRunning = doc["run"].as<bool>(); Serial.printf("Команда: %s\n", motorRunning ? "ПУСК" : "СТОП"); } // Изменение уставки if (doc.containsKey("setpoint")) { setpoint = doc["setpoint"].as<float>(); Serial.printf("Уставка: %.1f\n", setpoint); } // Сброс аварии if (doc["reset_alarm"].as<bool>()) { Serial.println("Сброс аварии"); } } } // ===== ПУБЛИКАЦИЯ ДАННЫХ ===== void publishTelemetry() { // Читаем датчики float temperature = bme.readTemperature(); float humidity = bme.readHumidity(); float pressure = bme.readPressure() / 100.0f; int current_raw = analogRead(34); // 4-20мА через ACS712 float current_a = current_raw * 25.0f / 4095.0f; // 0-25А // Формируем JSON StaticJsonDocument<512> doc; doc["device_id"] = DEVICE_ID; doc["timestamp"] = millis() / 1000; doc["uptime"] = uptime_sec; doc["running"] = motorRunning; doc["setpoint"] = setpoint; JsonObject sensors = doc.createNestedObject("sensors"); sensors["temperature"] = round(temperature * 10) / 10.0; sensors["humidity"] = round(humidity * 10) / 10.0; sensors["pressure"] = round(pressure * 10) / 10.0; sensors["current"] = round(current_a * 100) / 100.0; // Диагностика устройства JsonObject diag = doc.createNestedObject("diagnostics"); diag["wifi_rssi"] = WiFi.RSSI(); diag["free_heap"] = ESP.getFreeHeap(); diag["cpu_freq"] = ESP.getCpuFreqMHz(); // Сериализация и публикация char payload[512]; serializeJson(doc, payload); mqtt.publish(TOPIC_TELEMETRY, payload, false); // QoS 0, не retain // Проверка алармов if (temperature > 80.0f) { StaticJsonDocument<128> alarm; alarm["type"] = "high_temperature"; alarm["value"] = temperature; alarm["limit"] = 80.0f; alarm["message"] = "Превышена температура двигателя!"; char alarmPayload[128]; serializeJson(alarm, alarmPayload); mqtt.publish(TOPIC_ALARMS, alarmPayload, true); // retain = true } } // ===== SETUP / LOOP ===== void setup() { Serial.begin(115200); Wire.begin(21, 22); if (!bme.begin(0x76)) { Serial.println("BME280 не найден!"); } connectWiFi(); mqtt.setServer(MQTT_SERVER, MQTT_PORT); mqtt.setCallback(mqttCallback); mqtt.setBufferSize(1024); // Увеличиваем буфер для больших сообщений connectMQTT(); } void loop() { // Переподключение при потере связи if (!mqtt.connected()) { if (WiFi.status() != WL_CONNECTED) { connectWiFi(); } connectMQTT(); } mqtt.loop(); // Публикация каждые 5 секунд if (millis() - lastPublish >= 5000) { lastPublish = millis(); uptime_sec += 5; publishTelemetry(); } } Python: обработка и алармыimport paho.mqtt.client as mqtt import json import time from datetime import datetime from influxdb_client import InfluxDBClient, Point from influxdb_client.client.write_api import SYNCHRONOUS # ===== КОНФИГУРАЦИЯ ===== MQTT_BROKER = "192.168.1.100" MQTT_PORT = 1883 MQTT_USER = "backend" MQTT_PASS = "backendpass" INFLUX_URL = "http://localhost:8086" INFLUX_TOKEN = "your-influx-token" INFLUX_ORG = "factory" INFLUX_BUCKET = "telemetry" # ===== ИНИЦИАЛИЗАЦИЯ ===== influx_client = InfluxDBClient(url=INFLUX_URL, token=INFLUX_TOKEN, org=INFLUX_ORG) write_api = influx_client.write_api(write_options=SYNCHRONOUS) # Состояние алармов (дедупликация) active_alarms = {} def on_message(client, userdata, msg): topic = msg.topic try: data = json.loads(msg.payload.decode()) except json.JSONDecodeError: print(f"Ошибка JSON в топике {topic}") return # Маршрутизация по топику if "/telemetry" in topic: handle_telemetry(topic, data) elif "/alarms" in topic: handle_alarm(topic, data) elif "/status" in topic: handle_status(topic, data) def handle_telemetry(topic: str, data: dict): """Запись телеметрии в InfluxDB""" # Извлекаем путь устройства из топика # factory/line1/conveyor1/telemetry → ['factory', 'line1', 'conveyor1', 'telemetry'] parts = topic.split('/') if len(parts) < 4: return location = parts[1] # line1 device = parts[2] # conveyor1 sensors = data.get('sensors', {}) # Формируем точку данных для InfluxDB point = ( Point("telemetry") .tag("location", location) .tag("device", device) .tag("device_id", data.get('device_id', device)) .field("temperature", float(sensors.get('temperature', 0))) .field("humidity", float(sensors.get('humidity', 0))) .field("pressure", float(sensors.get('pressure', 0))) .field("current", float(sensors.get('current', 0))) .field("running", int(data.get('running', False))) .field("wifi_rssi", int(data.get('diagnostics', {}).get('wifi_rssi', 0))) ) try: write_api.write(bucket=INFLUX_BUCKET, record=point) except Exception as e: print(f"InfluxDB ошибка: {e}") # Проверка пороговых значений temp = sensors.get('temperature', 0) if temp > 85.0: send_alert(device, "critical", f"Критическая температура: {temp}°C") elif temp > 75.0: send_alert(device, "warning", f"Высокая температура: {temp}°C") def handle_alarm(topic: str, data: dict): """Обработка аларм-сообщений от устройства""" parts = topic.split('/') device = parts[2] if len(parts) >= 3 else "unknown" alarm_type = data.get('type', 'unknown') alarm_key = f"{device}_{alarm_type}" # Дедупликация: не спамим одинаковые алармы now = time.time() if alarm_key in active_alarms: if now - active_alarms[alarm_key] < 300: # 5 минут return active_alarms[alarm_key] = now print(f"🚨 АВАРИЯ [{device}]: {data.get('message', alarm_type)}") # Здесь можно добавить отправку в Telegram, email, SMS send_notification( f"⚠️ Авария на {device}\n" f"Тип: {alarm_type}\n" f"Значение: {data.get('value', 'N/A')}\n" f"Время: {datetime.now().strftime('%H:%M:%S')}" ) def handle_status(topic: str, data: dict): """Отслеживание онлайн/офлайн устройств""" parts = topic.split('/') device = parts[2] if len(parts) >= 3 else "unknown" online = data.get('online', False) print(f"{'🟢' if online else '🔴'} {device}: {'онлайн' if online else 'офлайн'}") if not online: send_alert(device, "critical", f"Устройство {device} потеряло связь!") def send_alert(device: str, level: str, message: str): """Отправка алерта (пример — в лог)""" timestamp = datetime.now().strftime("%Y-%m-%d %H:%M:%S") print(f"[{timestamp}] {level.upper()} [{device}]: {message}") def send_notification(text: str): """Здесь интеграция с Telegram Bot API""" # import requests # requests.post(f"https://api.telegram.org/bot{TOKEN}/sendMessage", # json={"chat_id": CHAT_ID, "text": text}) print(f"NOTIFICATION: {text}") # ===== ЗАПУСК ===== client = mqtt.Client(client_id="backend_processor") client.username_pw_set(MQTT_USER, MQTT_PASS) client.on_message = on_message client.connect(MQTT_BROKER, MQTT_PORT, 60) client.subscribe("factory/#", qos=1) # Подписка на всё print("Backend запущен, ожидаем данные...") client.loop_forever() InfluxDB + Grafana: красивые дашбордыУстановка через Docker Compose:# docker-compose.yml version: '3.8' services: mosquitto: image: eclipse-mosquitto:2 ports: - "1883:1883" - "9001:9001" volumes: - ./mosquitto/config:/mosquitto/config - mosquitto_data:/mosquitto/data influxdb: image: influxdb:2.7 ports: - "8086:8086" environment: DOCKER_INFLUXDB_INIT_MODE: setup DOCKER_INFLUXDB_INIT_USERNAME: admin DOCKER_INFLUXDB_INIT_PASSWORD: secretpassword DOCKER_INFLUXDB_INIT_ORG: factory DOCKER_INFLUXDB_INIT_BUCKET: telemetry DOCKER_INFLUXDB_INIT_RETENTION: 30d # Хранение 30 дней volumes: - influxdb_data:/var/lib/influxdb2 grafana: image: grafana/grafana:latest ports: - "3000:3000" environment: GF_SECURITY_ADMIN_PASSWORD: grafanapass GF_PLUGINS_ALLOW_LOADING_UNSIGNED_PLUGINS: "yesoreyeram-infinity-datasource" volumes: - grafana_data:/var/lib/grafana depends_on: - influxdb node-red: image: nodered/node-red:latest ports: - "1880:1880" volumes: - nodered_data:/data volumes: mosquitto_data: influxdb_data: grafana_data: nodered_data: Flux-запрос в Grafana (температура за последний час):from(bucket: "telemetry") |> range(start: -1h) |> filter(fn: (r) => r._measurement == "telemetry") |> filter(fn: (r) => r._field == "temperature") |> filter(fn: (r) => r.device == "conveyor1") |> aggregateWindow(every: 1m, fn: mean, createEmpty: false) |> yield(name: "mean_temperature") Предиктивная аналитика: пример с вибрациейimport numpy as np from scipy.fft import fft, fftfreq from scipy.stats import zscore def analyze_vibration(samples: list, sample_rate: int = 1000) -> dict: """ Анализ вибрации для обнаружения износа подшипников. samples: список отсчётов акселерометра sample_rate: частота дискретизации, Гц """ data = np.array(samples, dtype=float) n = len(data) # Временные характеристики rms = np.sqrt(np.mean(data**2)) # Эффективное значение (RMS) peak = np.max(np.abs(data)) # Пиковое значение crest = peak / rms if rms > 0 else 0 # Пик-фактор (norma: 1.4–2.5, износ: >4) kurtosis = float(np.mean((data - np.mean(data))**4) / (np.std(data)**4 + 1e-10)) # Спектральный анализ (FFT) spectrum = np.abs(fft(data))[:n//2] freqs = fftfreq(n, 1.0 / sample_rate)[:n//2] # Поиск доминирующих частот top_indices = np.argsort(spectrum)[-5:][::-1] dominant_freqs = [(float(freqs[i]), float(spectrum[i])) for i in top_indices] # Оценка состояния # Crest Factor: <2.5 — норма, 2.5–4 — внимание, >4 — износ # Kurtosis: <3 — норма (гауссов шум), >6 — дефект (удары) if crest > 4.0 or kurtosis > 6.0: status = "FAULT" recommendation = "Замените подшипник в течение 48 часов" elif crest > 2.5 or kurtosis > 4.5: status = "WARNING" recommendation = "Запланируйте замену при следующем ТО" else: status = "OK" recommendation = "Оборудование в норме" return { 'rms': round(rms, 4), 'peak': round(peak, 4), 'crest_factor': round(crest, 2), 'kurtosis': round(kurtosis, 2), 'dominant_freqs': dominant_freqs[:3], 'status': status, 'recommendation': recommendation, } # Пример использования с MQTT: def on_vibration_data(client, userdata, msg): data = json.loads(msg.payload) samples = data['samples'] device = data['device_id'] analysis = analyze_vibration(samples, sample_rate=data.get('sample_rate', 1000)) # Публикуем результат анализа result_topic = f"factory/analytics/{device}/bearing_health" client.publish(result_topic, json.dumps(analysis), retain=True) if analysis['status'] != 'OK': print(f"⚠️ {device}: {analysis['recommendation']}") # Отправить уведомление... Безопасность IIoTЭто не опционально. Промышленные системы с интернет-подключением — лакомая цель для атак. Минимальный стандарт: TLS везде — Mosquitto с сертификатами, никакого plaintext Аутентификация — уникальный логин/пароль для каждого устройства, или X.509 сертификаты Авторизация по ACL — устройство conveyor1 пишет только в factory/line1/conveyor1/#, не может читать чужие команды Сегментация сети — IoT-устройства в отдельном VLAN, без прямого доступа в интернет OTA-обновления — возможность удалённого обновления прошивки при обнаружении уязвимостей Мониторинг аномалий — необычное количество сообщений, соединения с нестандартных IP # Mosquitto ACL файл /etc/mosquitto/acl: # Устройство conveyor1 — пишет только в свои топики user esp32_conveyor1 topic write factory/line1/conveyor1/+ topic read factory/line1/conveyor1/commands # Backend — читает всё, пишет команды user backend topic readwrite factory/# ЗаключениеIIoT с MQTT — это доступная и проверенная технология, которую можно внедрить даже на небольшом предприятии с минимальными затратами. ESP32 + Mosquitto + InfluxDB + Grafana — весь стек работает на одном Raspberry Pi 4 или бюджетном сервере. Главные принципы: данные должны быть точными (правильная калибровка датчиков), надёжными (QoS, переподключение, buffering), безопасными (TLS, ACL) и полезными (не просто собирать, а анализировать и действовать). Начните с малого: один датчик температуры, один MQTT-брокер, один Grafana-дашборд. После первого успешного графика желание расширять систему появится само. -
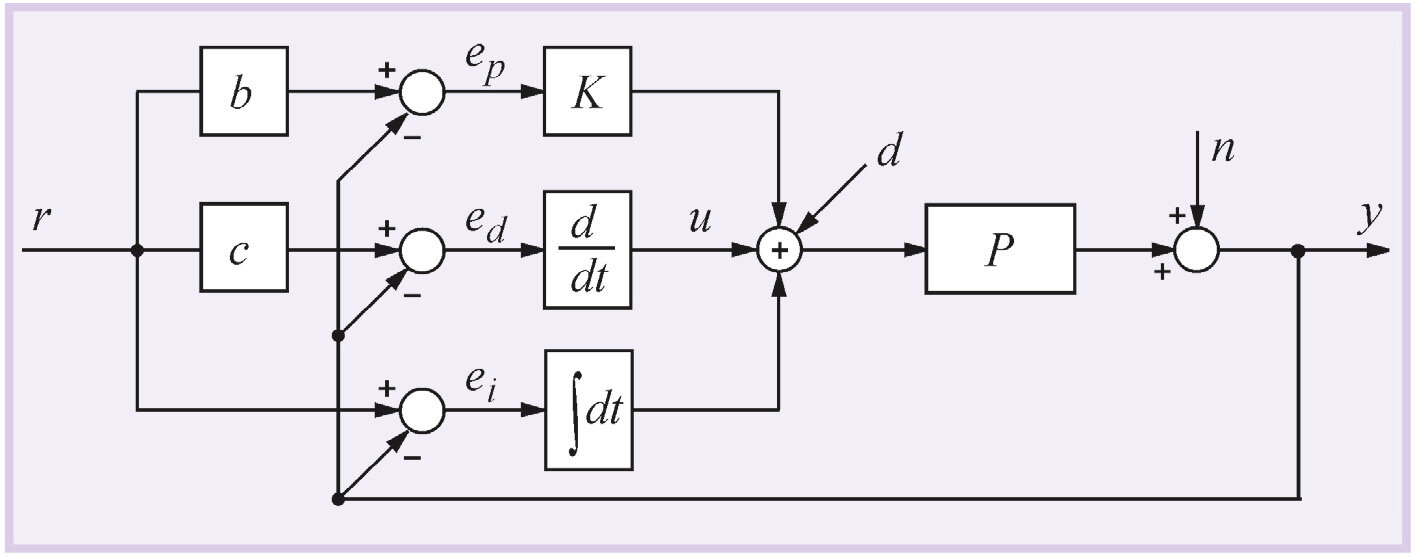 Что такое ПИД и почему он вездеПИД-регулятор (Пропорционально-Интегрально-Дифференциальный) — самый распространённый алгоритм автоматического управления в промышленности. По различным оценкам, более 90% всех промышленных регуляторов используют ПИД или его вариации. Термостат в вашей духовке. Круиз-контроль в автомобиле. Система стабилизации квадрокоптера. Регулятор давления в насосной станции. Система автопилота самолёта. Везде — ПИД. Почему? Потому что он: Прост в понимании — три компоненты, три параметра Работает для подавляющего большинства объектов управления Хорошо изучен — 80 лет теории и практики Легко реализуется — 10–20 строк кода Математика: просто о сложномПусть у нас есть: SP (Setpoint) — желаемое значение (уставка) PV (Process Variable) — измеренное значение e(t) = SP – PV — ошибка регулирования u(t) — управляющий сигнал (выход регулятора) Формула ПИД: u(t) = Kp × e(t) + Ki × ∫e(t)dt + Kd × de(t)/dt │ │ │ Пропорциональная Интегральная Дифференциальная составляющая составляющая составляющая Разберём каждую составляющую на примере: нагреватель, цель — держать 80°C. P — Пропорциональная составляющаяУправляющий сигнал пропорционален текущей ошибке. Температура 60°C, уставка 80°C, ошибка 20°C → включить нагрев на 20×Kp%. Проблема чистого P-регулятора: статическая ошибка (offset). При стабильном нагреве нагрев должен компенсировать теплопотери, значит ошибка никогда не станет нулём — иначе нагрев выключится и температура упадёт. Система "зависает" с постоянной небольшой ошибкой. I — Интегральная составляющаяСуммирует ошибку со временем. Даже маленькая постоянная ошибка, накапливаясь, создаёт всё больший управляющий сигнал — и в конечном счёте устраняет статическую ошибку. Проблема: интегральное насыщение (windup). Если выход ограничен (0–100%), а ошибка долго накапливается (например, нагрев не справляется при открытом окне), интеграл "разгоняется" до огромного значения. Потом, когда ошибка уменьшается, нужно много времени чтобы интеграл "разрядился" — система перерегулирует. D — Дифференциальная составляющаяРеагирует на скорость изменения ошибки. Если ошибка быстро уменьшается (температура быстро растёт к уставке) — D-составляющая "притормаживает" для предотвращения перерегулирования. Проблема: шум. Производная усиливает высокочастотный шум измерений. Любой дёрг датчика превращается в огромный кратковременный скачок управляющего сигнала. Поэтому D всегда применяется с фильтром. Дискретная реализация (для цифровых систем)В реальных системах регулятор выполняется с дискретным шагом Ts (время выборки). Непрерывная формула преобразуется в разностное уравнение: P = Kp × e[k] I = I[k-1] + Ki × e[k] × Ts D = Kd × (e[k] - e[k-1]) / Ts u[k] = P + I + D Но правильная реализация сложнее. Полная профессиональная реализация: class PIDController: """ Промышленный ПИД-регулятор с: - Anti-windup (ограничение интеграла) - Производная по измерению (не по ошибке) - Фильтр производной - Ограничение выхода - Bump-less transfer (безударное переключение авто/ручной) """ def __init__(self, kp: float, ki: float, kd: float, ts: float, # Период дискретизации, секунды out_min: float = 0.0, out_max: float = 100.0, filter_coeff: float = 0.1): # Коэффициент фильтра D self.kp = kp self.ki = ki self.kd = kd self.ts = ts self.out_min = out_min self.out_max = out_max self.filter_coeff = filter_coeff # Nf: чем меньше, тем сильнее фильтрация # Состояние self.setpoint = 0.0 self.integral = 0.0 self.prev_measurement = None self.filtered_deriv = 0.0 self.output = 0.0 # Режим self.auto_mode = True def set_setpoint(self, sp: float): self.setpoint = sp def set_manual(self, output: float): """Ручной режим — задать выход напрямую""" self.auto_mode = False self.output = max(self.out_min, min(self.out_max, output)) # При переходе обратно в авто — интеграл синхронизируется def set_auto(self): """Переход в автоматический режим (bump-less)""" if not self.auto_mode: # Инициализируем интеграл текущим выходом # чтобы не было скачка при переключении self.integral = self.output self.auto_mode = True def compute(self, measurement: float) -> float: """ Вычислить управляющий сигнал. measurement — текущее значение регулируемой величины. Вызывать строго с периодом ts! """ if not self.auto_mode: return self.output if self.prev_measurement is None: self.prev_measurement = measurement error = self.setpoint - measurement # === Пропорциональная составляющая === p_term = self.kp * error # === Интегральная составляющая с anti-windup === # Предварительно вычисляем интеграл integral_new = self.integral + self.ki * error * self.ts # === Дифференциальная составляющая === # Производная по ИЗМЕРЕНИЮ (не по ошибке) — избегаем derivative kick # при изменении уставки raw_deriv = -(measurement - self.prev_measurement) / self.ts # Фильтр производной (экспоненциальный) self.filtered_deriv = (self.filter_coeff * raw_deriv + (1 - self.filter_coeff) * self.filtered_deriv) d_term = self.kd * self.filtered_deriv # === Предварительный выход === output_raw = p_term + integral_new + d_term # === Ограничение выхода === self.output = max(self.out_min, min(self.out_max, output_raw)) # === Anti-windup: обновляем интеграл только если не насыщены === # Или используем "back-calculation anti-windup" if self.output == output_raw: # Нет насыщения — обновляем интеграл нормально self.integral = integral_new else: # Насыщение — не накапливаем интеграл дальше # Back-calculation: уменьшаем интеграл на величину насыщения saturation = output_raw - self.output self.integral = integral_new - saturation self.prev_measurement = measurement return self.output def get_components(self) -> dict: """Для отладки и мониторинга""" error = self.setpoint - (self.prev_measurement or 0) return { 'setpoint': self.setpoint, 'error': error, 'p_term': self.kp * error, 'i_term': self.integral, 'd_term': self.kd * self.filtered_deriv, 'output': self.output, } Методы настройки коэффициентовМетод 1: Инженерная настройка (руками)Алгоритм по шагам: Ki = 0, Kd = 0. Постепенно увеличиваем Kp до появления устойчивых колебаний (нарастающих) — это Kc. Уменьшаем Kp до 0.5 × Kc. Медленно увеличиваем Ki. Он должен устранить остаточную ошибку. Если появились колебания — Ki велик. Если нужно улучшить реакцию и уменьшить перерегулирование — добавляем Kd. Часто тепловые объекты обходятся без D. Метод 2: Циглера-Николса (классика)Установить Ki = 0, Kd = 0 Увеличивать Kp до возникновения незатухающих колебаний Записать: Ku — критический коэффициент, Tu — период колебаний Тип Kp Ki Kd Только P 0.5 × Ku — — PI 0.45 × Ku 0.54 × Ku / Tu — ПИД 0.6 × Ku 1.2 × Ku / Tu 0.075 × Ku × Tu Результат: Обычно агрессивный, дающий ~25% перерегулирования. Хорош как стартовая точка. Метод 3: Ступенчатый отклик (Step Response)Более безопасный метод — не нужно доводить до автоколебаний: Перевести систему в устойчивое состояние Скачком изменить управляющий сигнал на 10–20% Записать переходный процесс import numpy as np import matplotlib.pyplot as plt from scipy.optimize import curve_fit def fit_first_order_plus_delay(t, data, step_size): """ Аппроксимация объекта управления моделью первого порядка с запаздыванием: G(s) = K × exp(-L×s) / (T×s + 1) """ # Нормализация данных y_norm = (data - data[0]) / step_size # Начальные параметры: K, T, L K_init = y_norm[-1] # Статический коэффициент усиления T_init = t[np.argmin(np.abs(y_norm - 0.63 * K_init))] L_init = t[np.argmin(np.abs(y_norm - 0.05 * K_init))] def model(t, K, T, L): result = np.zeros_like(t) for i, ti in enumerate(t): if ti > L: result[i] = K * (1 - np.exp(-(ti - L) / T)) return result try: popt, _ = curve_fit(model, t, y_norm, p0=[K_init, T_init, max(L_init, 0.001)], bounds=([0, 0, 0], [np.inf, np.inf, np.inf])) K, T, L = popt return K, T, L except RuntimeError: return K_init, T_init, max(L_init, 0.001) def imc_tuning(K, T, L, lambda_factor=1.0): """ IMC (Internal Model Control) настройка — лучший метод для объектов с запаздыванием. lambda_factor: чем больше — тем медленнее, но стабильнее (рекомендуется L...3L) """ lambda_c = lambda_factor * max(L, 0.1 * T) Kp = (2 * T + L) / (2 * K * (lambda_c + L)) Ti = T + L / 2 # Постоянная интегрирования Td = T * L / (2 * T + L) # Постоянная дифференцирования Ki = Kp / Ti Kd = Kp * Td return { 'Kp': round(Kp, 4), 'Ki': round(Ki, 4), 'Kd': round(Kd, 4), 'Ti': round(Ti, 4), 'Td': round(Td, 4), } # Пример использования: # K=2.0 (усиление объекта), T=30с (постоянная времени), L=5с (запаздывание) params = imc_tuning(K=2.0, T=30.0, L=5.0, lambda_factor=1.0) print(f"Kp={params['Kp']}, Ki={params['Ki']}, Kd={params['Kd']}") Симуляция и проверка настройкиПеред применением в реальной системе — всегда симулируйте: import numpy as np import matplotlib.pyplot as plt def simulate_pid(kp, ki, kd, setpoint, sim_time=200, ts=0.1, K=2.0, T=30.0, L=5.0, noise_std=0.1): """ Симуляция ПИД с объектом первого порядка + запаздывание. Возвращает массивы времени, выходного значения, управляющего сигнала. """ steps = int(sim_time / ts) delay_steps = int(L / ts) t = np.zeros(steps) pv = np.zeros(steps) u = np.zeros(steps) sp = np.zeros(steps) pid = PIDController(kp, ki, kd, ts, out_min=0.0, out_max=100.0) # Ступенчатое изменение уставки sp[:steps//4] = 0 sp[steps//4:] = setpoint # Буфер запаздывания u_delayed = np.zeros(delay_steps + 1) for i in range(1, steps): t[i] = i * ts sp_now = sp[i] pid.set_setpoint(sp_now) # Добавляем шум измерения noise = np.random.normal(0, noise_std) # Управляющий сигнал u[i] = pid.compute(pv[i-1] + noise) # Обновляем буфер запаздывания u_delayed = np.roll(u_delayed, 1) u_delayed[0] = u[i] # Объект управления: первый порядок с запаздыванием # dy/dt = (K × u_delayed - y) / T pv[i] = pv[i-1] + ts * (K * u_delayed[-1] - pv[i-1]) / T return t, pv, u, sp # Сравнение разных настроек fig, axes = plt.subplots(2, 1, figsize=(12, 8)) configs = [ {'kp': 0.5, 'ki': 0.01, 'kd': 2.0, 'label': 'IMC (lambda=1)', 'color': 'blue'}, {'kp': 1.5, 'ki': 0.05, 'kd': 5.0, 'label': 'Агрессивный', 'color': 'red'}, {'kp': 0.2, 'ki': 0.005, 'kd': 0.5, 'label': 'Консервативный', 'color': 'green'}, ] for cfg in configs: t, pv, u, sp = simulate_pid( kp=cfg['kp'], ki=cfg['ki'], kd=cfg['kd'], setpoint=60.0 ) axes[0].plot(t, pv, label=cfg['label'], color=cfg['color']) axes[1].plot(t, u, color=cfg['color'], alpha=0.7) axes[0].plot(t, sp, 'k--', label='Уставка', linewidth=2) axes[0].set_ylabel('Температура, °C') axes[0].set_title('Сравнение настроек ПИД-регулятора') axes[0].legend() axes[0].grid(True) axes[1].set_xlabel('Время, с') axes[1].set_ylabel('Управляющий сигнал, %') axes[1].grid(True) plt.tight_layout() plt.savefig('pid_comparison.png', dpi=150) Специальные случаи и решенияКаскадный ПИД (Cascade Control)Используется когда одного ПИД недостаточно. Классический пример: температурный реактор с нагревателем и теплоносителем. Внешний ПИД (медленный): SP температуры → [ПИД_темп] → SP расхода теплоносителя Внутренний ПИД (быстрый): SP расхода → [ПИД_расход] → Управление клапаном Внутренний контур в 5–10 раз быстрее внешнего. Преимущество: внутренний контур компенсирует возмущения по теплоносителю до того, как они повлияют на температуру. class CascadePID: """Каскадный регулятор с двумя ПИД""" def __init__(self, outer_pid: PIDController, inner_pid: PIDController): self.outer = outer_pid self.inner = inner_pid def compute(self, outer_measurement: float, inner_measurement: float) -> float: """ outer_measurement — медленная переменная (температура) inner_measurement — быстрая переменная (расход) """ # Внешний контур вырабатывает уставку для внутреннего inner_setpoint = self.outer.compute(outer_measurement) # Ограничиваем уставку внутреннего контура inner_setpoint = max(0.0, min(100.0, inner_setpoint)) self.inner.set_setpoint(inner_setpoint) # Внутренний контур управляет исполнительным устройством return self.inner.compute(inner_measurement) ПИД с ограничением скорости изменения выхода (Rate Limiting)Некоторые исполнительные устройства не любят резких скачков (например, регулирующие клапана — быстрое перемещение вызывает гидроудары): def rate_limited_output(new_output: float, prev_output: float, max_rate: float, ts: float) -> float: """ Ограничивает скорость изменения выходного сигнала. max_rate — максимальное изменение в секунду (например, 10%/сек) """ max_change = max_rate * ts change = new_output - prev_output change = max(-max_change, min(max_change, change)) return prev_output + change ПИД для нестационарных объектов (Gain Scheduling)Если параметры объекта меняются в зависимости от рабочей точки (например, нагрев при низкой температуре работает иначе чем при высокой): class GainSchedulingPID: """ПИД с переключением коэффициентов в зависимости от уставки""" def __init__(self): # Коэффициенты для разных диапазонов температур self.schedules = [ # (max_sp, kp, ki, kd) (50.0, 2.0, 0.05, 1.0), # Низкая температура (100.0, 1.5, 0.03, 0.8), # Средняя (200.0, 1.0, 0.02, 0.5), # Высокая (объект другой!) ] self.pid = PIDController(kp=2.0, ki=0.05, kd=1.0, ts=1.0) def update_gains(self, setpoint: float): for max_sp, kp, ki, kd in self.schedules: if setpoint <= max_sp: self.pid.kp = kp self.pid.ki = ki self.pid.kd = kd break def compute(self, setpoint: float, measurement: float) -> float: self.update_gains(setpoint) self.pid.set_setpoint(setpoint) return self.pid.compute(measurement) Реализация на C для встраиваемых систем#include <stdint.h> #include <float.h> typedef struct { float kp; float ki; float kd; float ts; // Период дискретизации, секунды float out_min; float out_max; float filter_coeff; // Коэффициент фильтра производной (0.01..0.2) // Состояние float setpoint; float integral; float prev_measurement; float filtered_deriv; float output; uint8_t first_run; } PIDState; void PID_Init(PIDState *pid, float kp, float ki, float kd, float ts, float out_min, float out_max) { pid->kp = kp; pid->ki = ki; pid->kd = kd; pid->ts = ts; pid->out_min = out_min; pid->out_max = out_max; pid->filter_coeff = 0.1f; pid->setpoint = 0.0f; pid->integral = 0.0f; pid->prev_measurement = 0.0f; pid->filtered_deriv = 0.0f; pid->output = 0.0f; pid->first_run = 1; } void PID_SetSetpoint(PIDState *pid, float sp) { pid->setpoint = sp; } void PID_Reset(PIDState *pid) { pid->integral = 0.0f; pid->filtered_deriv = 0.0f; pid->first_run = 1; } float PID_Compute(PIDState *pid, float measurement) { float error, p_term, d_term, output_raw; float raw_deriv, integral_new; if (pid->first_run) { pid->prev_measurement = measurement; pid->first_run = 0; } error = pid->setpoint - measurement; // Пропорциональная p_term = pid->kp * error; // Интегральная (предварительный расчёт) integral_new = pid->integral + pid->ki * error * pid->ts; // Дифференциальная по измерению raw_deriv = -(measurement - pid->prev_measurement) / pid->ts; // Фильтр производной (IIR первого порядка) pid->filtered_deriv = pid->filter_coeff * raw_deriv + (1.0f - pid->filter_coeff) * pid->filtered_deriv; d_term = pid->kd * pid->filtered_deriv; // Суммируем output_raw = p_term + integral_new + d_term; // Ограничение выхода if (output_raw > pid->out_max) pid->output = pid->out_max; else if (output_raw < pid->out_min) pid->output = pid->out_min; else pid->output = output_raw; // Anti-windup: обновляем интеграл только если нет насыщения if (pid->output == output_raw) { pid->integral = integral_new; } else { // Back-calculation float saturation = output_raw - pid->output; pid->integral = integral_new - saturation; } pid->prev_measurement = measurement; return pid->output; } // Использование на STM32/Arduino (в прерывании таймера): PIDState temp_pid; void PID_ISR(void) // Вызывается каждые 100 мс { float measured_temp = read_temperature_sensor(); float heater_power = PID_Compute(&temp_pid, measured_temp); // Перевести в ШИМ 0-255 uint8_t pwm = (uint8_t)(heater_power * 255.0f / 100.0f); set_heater_pwm(pwm); } Диагностика плохой работы ПИДСимптом: Медленный выход на уставку, большая статическая ошибкаМало Kp и/или Ki Проверьте нет ли механических ограничений (клапан не открывается полностью) Проверьте масштабирование — правильно ли в % интерпретируется выход? Симптом: Сильные устойчивые колебанияKp слишком велик Ki слишком велик (самая частая причина!) Период дискретизации слишком большой относительно динамики объекта Симптом: Большое перерегулирование при изменении уставкиВелико Kp, увеличьте Kd Используйте "setpoint weighting": P-составляющую считайте как Kp × (w × SP – PV), где w < 1 Симптом: Шумный выход, дёргает исполнительный механизмШум датчика, увеличьте filter_coeff для фильтрации D Уменьшите Kd Добавьте мёртвую зону: не реагировать если |error| < deadband ЗаключениеПИД-регулятор — это не просто формула, это искусство. Одни и те же Kp, Ki, Kd дадут отличные результаты на одном объекте и катастрофу на другом. Понимание физики объекта управления важнее знания формул. Практический совет: начинайте с IMC-метода настройки — он даёт предсказуемые результаты и физический смысл у параметра lambda (желаемая скорость реакции). Используйте симуляцию перед внедрением. Добавляйте anti-windup всегда — без него реальная система будет вести себя непредсказуемо после насыщения. И помните: 80% задач управления решается PI-регулятором (без D). D добавляйте только когда PI действительно недостаточно и когда шум измерений не является проблемой.
Что такое ПИД и почему он вездеПИД-регулятор (Пропорционально-Интегрально-Дифференциальный) — самый распространённый алгоритм автоматического управления в промышленности. По различным оценкам, более 90% всех промышленных регуляторов используют ПИД или его вариации. Термостат в вашей духовке. Круиз-контроль в автомобиле. Система стабилизации квадрокоптера. Регулятор давления в насосной станции. Система автопилота самолёта. Везде — ПИД. Почему? Потому что он: Прост в понимании — три компоненты, три параметра Работает для подавляющего большинства объектов управления Хорошо изучен — 80 лет теории и практики Легко реализуется — 10–20 строк кода Математика: просто о сложномПусть у нас есть: SP (Setpoint) — желаемое значение (уставка) PV (Process Variable) — измеренное значение e(t) = SP – PV — ошибка регулирования u(t) — управляющий сигнал (выход регулятора) Формула ПИД: u(t) = Kp × e(t) + Ki × ∫e(t)dt + Kd × de(t)/dt │ │ │ Пропорциональная Интегральная Дифференциальная составляющая составляющая составляющая Разберём каждую составляющую на примере: нагреватель, цель — держать 80°C. P — Пропорциональная составляющаяУправляющий сигнал пропорционален текущей ошибке. Температура 60°C, уставка 80°C, ошибка 20°C → включить нагрев на 20×Kp%. Проблема чистого P-регулятора: статическая ошибка (offset). При стабильном нагреве нагрев должен компенсировать теплопотери, значит ошибка никогда не станет нулём — иначе нагрев выключится и температура упадёт. Система "зависает" с постоянной небольшой ошибкой. I — Интегральная составляющаяСуммирует ошибку со временем. Даже маленькая постоянная ошибка, накапливаясь, создаёт всё больший управляющий сигнал — и в конечном счёте устраняет статическую ошибку. Проблема: интегральное насыщение (windup). Если выход ограничен (0–100%), а ошибка долго накапливается (например, нагрев не справляется при открытом окне), интеграл "разгоняется" до огромного значения. Потом, когда ошибка уменьшается, нужно много времени чтобы интеграл "разрядился" — система перерегулирует. D — Дифференциальная составляющаяРеагирует на скорость изменения ошибки. Если ошибка быстро уменьшается (температура быстро растёт к уставке) — D-составляющая "притормаживает" для предотвращения перерегулирования. Проблема: шум. Производная усиливает высокочастотный шум измерений. Любой дёрг датчика превращается в огромный кратковременный скачок управляющего сигнала. Поэтому D всегда применяется с фильтром. Дискретная реализация (для цифровых систем)В реальных системах регулятор выполняется с дискретным шагом Ts (время выборки). Непрерывная формула преобразуется в разностное уравнение: P = Kp × e[k] I = I[k-1] + Ki × e[k] × Ts D = Kd × (e[k] - e[k-1]) / Ts u[k] = P + I + D Но правильная реализация сложнее. Полная профессиональная реализация: class PIDController: """ Промышленный ПИД-регулятор с: - Anti-windup (ограничение интеграла) - Производная по измерению (не по ошибке) - Фильтр производной - Ограничение выхода - Bump-less transfer (безударное переключение авто/ручной) """ def __init__(self, kp: float, ki: float, kd: float, ts: float, # Период дискретизации, секунды out_min: float = 0.0, out_max: float = 100.0, filter_coeff: float = 0.1): # Коэффициент фильтра D self.kp = kp self.ki = ki self.kd = kd self.ts = ts self.out_min = out_min self.out_max = out_max self.filter_coeff = filter_coeff # Nf: чем меньше, тем сильнее фильтрация # Состояние self.setpoint = 0.0 self.integral = 0.0 self.prev_measurement = None self.filtered_deriv = 0.0 self.output = 0.0 # Режим self.auto_mode = True def set_setpoint(self, sp: float): self.setpoint = sp def set_manual(self, output: float): """Ручной режим — задать выход напрямую""" self.auto_mode = False self.output = max(self.out_min, min(self.out_max, output)) # При переходе обратно в авто — интеграл синхронизируется def set_auto(self): """Переход в автоматический режим (bump-less)""" if not self.auto_mode: # Инициализируем интеграл текущим выходом # чтобы не было скачка при переключении self.integral = self.output self.auto_mode = True def compute(self, measurement: float) -> float: """ Вычислить управляющий сигнал. measurement — текущее значение регулируемой величины. Вызывать строго с периодом ts! """ if not self.auto_mode: return self.output if self.prev_measurement is None: self.prev_measurement = measurement error = self.setpoint - measurement # === Пропорциональная составляющая === p_term = self.kp * error # === Интегральная составляющая с anti-windup === # Предварительно вычисляем интеграл integral_new = self.integral + self.ki * error * self.ts # === Дифференциальная составляющая === # Производная по ИЗМЕРЕНИЮ (не по ошибке) — избегаем derivative kick # при изменении уставки raw_deriv = -(measurement - self.prev_measurement) / self.ts # Фильтр производной (экспоненциальный) self.filtered_deriv = (self.filter_coeff * raw_deriv + (1 - self.filter_coeff) * self.filtered_deriv) d_term = self.kd * self.filtered_deriv # === Предварительный выход === output_raw = p_term + integral_new + d_term # === Ограничение выхода === self.output = max(self.out_min, min(self.out_max, output_raw)) # === Anti-windup: обновляем интеграл только если не насыщены === # Или используем "back-calculation anti-windup" if self.output == output_raw: # Нет насыщения — обновляем интеграл нормально self.integral = integral_new else: # Насыщение — не накапливаем интеграл дальше # Back-calculation: уменьшаем интеграл на величину насыщения saturation = output_raw - self.output self.integral = integral_new - saturation self.prev_measurement = measurement return self.output def get_components(self) -> dict: """Для отладки и мониторинга""" error = self.setpoint - (self.prev_measurement or 0) return { 'setpoint': self.setpoint, 'error': error, 'p_term': self.kp * error, 'i_term': self.integral, 'd_term': self.kd * self.filtered_deriv, 'output': self.output, } Методы настройки коэффициентовМетод 1: Инженерная настройка (руками)Алгоритм по шагам: Ki = 0, Kd = 0. Постепенно увеличиваем Kp до появления устойчивых колебаний (нарастающих) — это Kc. Уменьшаем Kp до 0.5 × Kc. Медленно увеличиваем Ki. Он должен устранить остаточную ошибку. Если появились колебания — Ki велик. Если нужно улучшить реакцию и уменьшить перерегулирование — добавляем Kd. Часто тепловые объекты обходятся без D. Метод 2: Циглера-Николса (классика)Установить Ki = 0, Kd = 0 Увеличивать Kp до возникновения незатухающих колебаний Записать: Ku — критический коэффициент, Tu — период колебаний Тип Kp Ki Kd Только P 0.5 × Ku — — PI 0.45 × Ku 0.54 × Ku / Tu — ПИД 0.6 × Ku 1.2 × Ku / Tu 0.075 × Ku × Tu Результат: Обычно агрессивный, дающий ~25% перерегулирования. Хорош как стартовая точка. Метод 3: Ступенчатый отклик (Step Response)Более безопасный метод — не нужно доводить до автоколебаний: Перевести систему в устойчивое состояние Скачком изменить управляющий сигнал на 10–20% Записать переходный процесс import numpy as np import matplotlib.pyplot as plt from scipy.optimize import curve_fit def fit_first_order_plus_delay(t, data, step_size): """ Аппроксимация объекта управления моделью первого порядка с запаздыванием: G(s) = K × exp(-L×s) / (T×s + 1) """ # Нормализация данных y_norm = (data - data[0]) / step_size # Начальные параметры: K, T, L K_init = y_norm[-1] # Статический коэффициент усиления T_init = t[np.argmin(np.abs(y_norm - 0.63 * K_init))] L_init = t[np.argmin(np.abs(y_norm - 0.05 * K_init))] def model(t, K, T, L): result = np.zeros_like(t) for i, ti in enumerate(t): if ti > L: result[i] = K * (1 - np.exp(-(ti - L) / T)) return result try: popt, _ = curve_fit(model, t, y_norm, p0=[K_init, T_init, max(L_init, 0.001)], bounds=([0, 0, 0], [np.inf, np.inf, np.inf])) K, T, L = popt return K, T, L except RuntimeError: return K_init, T_init, max(L_init, 0.001) def imc_tuning(K, T, L, lambda_factor=1.0): """ IMC (Internal Model Control) настройка — лучший метод для объектов с запаздыванием. lambda_factor: чем больше — тем медленнее, но стабильнее (рекомендуется L...3L) """ lambda_c = lambda_factor * max(L, 0.1 * T) Kp = (2 * T + L) / (2 * K * (lambda_c + L)) Ti = T + L / 2 # Постоянная интегрирования Td = T * L / (2 * T + L) # Постоянная дифференцирования Ki = Kp / Ti Kd = Kp * Td return { 'Kp': round(Kp, 4), 'Ki': round(Ki, 4), 'Kd': round(Kd, 4), 'Ti': round(Ti, 4), 'Td': round(Td, 4), } # Пример использования: # K=2.0 (усиление объекта), T=30с (постоянная времени), L=5с (запаздывание) params = imc_tuning(K=2.0, T=30.0, L=5.0, lambda_factor=1.0) print(f"Kp={params['Kp']}, Ki={params['Ki']}, Kd={params['Kd']}") Симуляция и проверка настройкиПеред применением в реальной системе — всегда симулируйте: import numpy as np import matplotlib.pyplot as plt def simulate_pid(kp, ki, kd, setpoint, sim_time=200, ts=0.1, K=2.0, T=30.0, L=5.0, noise_std=0.1): """ Симуляция ПИД с объектом первого порядка + запаздывание. Возвращает массивы времени, выходного значения, управляющего сигнала. """ steps = int(sim_time / ts) delay_steps = int(L / ts) t = np.zeros(steps) pv = np.zeros(steps) u = np.zeros(steps) sp = np.zeros(steps) pid = PIDController(kp, ki, kd, ts, out_min=0.0, out_max=100.0) # Ступенчатое изменение уставки sp[:steps//4] = 0 sp[steps//4:] = setpoint # Буфер запаздывания u_delayed = np.zeros(delay_steps + 1) for i in range(1, steps): t[i] = i * ts sp_now = sp[i] pid.set_setpoint(sp_now) # Добавляем шум измерения noise = np.random.normal(0, noise_std) # Управляющий сигнал u[i] = pid.compute(pv[i-1] + noise) # Обновляем буфер запаздывания u_delayed = np.roll(u_delayed, 1) u_delayed[0] = u[i] # Объект управления: первый порядок с запаздыванием # dy/dt = (K × u_delayed - y) / T pv[i] = pv[i-1] + ts * (K * u_delayed[-1] - pv[i-1]) / T return t, pv, u, sp # Сравнение разных настроек fig, axes = plt.subplots(2, 1, figsize=(12, 8)) configs = [ {'kp': 0.5, 'ki': 0.01, 'kd': 2.0, 'label': 'IMC (lambda=1)', 'color': 'blue'}, {'kp': 1.5, 'ki': 0.05, 'kd': 5.0, 'label': 'Агрессивный', 'color': 'red'}, {'kp': 0.2, 'ki': 0.005, 'kd': 0.5, 'label': 'Консервативный', 'color': 'green'}, ] for cfg in configs: t, pv, u, sp = simulate_pid( kp=cfg['kp'], ki=cfg['ki'], kd=cfg['kd'], setpoint=60.0 ) axes[0].plot(t, pv, label=cfg['label'], color=cfg['color']) axes[1].plot(t, u, color=cfg['color'], alpha=0.7) axes[0].plot(t, sp, 'k--', label='Уставка', linewidth=2) axes[0].set_ylabel('Температура, °C') axes[0].set_title('Сравнение настроек ПИД-регулятора') axes[0].legend() axes[0].grid(True) axes[1].set_xlabel('Время, с') axes[1].set_ylabel('Управляющий сигнал, %') axes[1].grid(True) plt.tight_layout() plt.savefig('pid_comparison.png', dpi=150) Специальные случаи и решенияКаскадный ПИД (Cascade Control)Используется когда одного ПИД недостаточно. Классический пример: температурный реактор с нагревателем и теплоносителем. Внешний ПИД (медленный): SP температуры → [ПИД_темп] → SP расхода теплоносителя Внутренний ПИД (быстрый): SP расхода → [ПИД_расход] → Управление клапаном Внутренний контур в 5–10 раз быстрее внешнего. Преимущество: внутренний контур компенсирует возмущения по теплоносителю до того, как они повлияют на температуру. class CascadePID: """Каскадный регулятор с двумя ПИД""" def __init__(self, outer_pid: PIDController, inner_pid: PIDController): self.outer = outer_pid self.inner = inner_pid def compute(self, outer_measurement: float, inner_measurement: float) -> float: """ outer_measurement — медленная переменная (температура) inner_measurement — быстрая переменная (расход) """ # Внешний контур вырабатывает уставку для внутреннего inner_setpoint = self.outer.compute(outer_measurement) # Ограничиваем уставку внутреннего контура inner_setpoint = max(0.0, min(100.0, inner_setpoint)) self.inner.set_setpoint(inner_setpoint) # Внутренний контур управляет исполнительным устройством return self.inner.compute(inner_measurement) ПИД с ограничением скорости изменения выхода (Rate Limiting)Некоторые исполнительные устройства не любят резких скачков (например, регулирующие клапана — быстрое перемещение вызывает гидроудары): def rate_limited_output(new_output: float, prev_output: float, max_rate: float, ts: float) -> float: """ Ограничивает скорость изменения выходного сигнала. max_rate — максимальное изменение в секунду (например, 10%/сек) """ max_change = max_rate * ts change = new_output - prev_output change = max(-max_change, min(max_change, change)) return prev_output + change ПИД для нестационарных объектов (Gain Scheduling)Если параметры объекта меняются в зависимости от рабочей точки (например, нагрев при низкой температуре работает иначе чем при высокой): class GainSchedulingPID: """ПИД с переключением коэффициентов в зависимости от уставки""" def __init__(self): # Коэффициенты для разных диапазонов температур self.schedules = [ # (max_sp, kp, ki, kd) (50.0, 2.0, 0.05, 1.0), # Низкая температура (100.0, 1.5, 0.03, 0.8), # Средняя (200.0, 1.0, 0.02, 0.5), # Высокая (объект другой!) ] self.pid = PIDController(kp=2.0, ki=0.05, kd=1.0, ts=1.0) def update_gains(self, setpoint: float): for max_sp, kp, ki, kd in self.schedules: if setpoint <= max_sp: self.pid.kp = kp self.pid.ki = ki self.pid.kd = kd break def compute(self, setpoint: float, measurement: float) -> float: self.update_gains(setpoint) self.pid.set_setpoint(setpoint) return self.pid.compute(measurement) Реализация на C для встраиваемых систем#include <stdint.h> #include <float.h> typedef struct { float kp; float ki; float kd; float ts; // Период дискретизации, секунды float out_min; float out_max; float filter_coeff; // Коэффициент фильтра производной (0.01..0.2) // Состояние float setpoint; float integral; float prev_measurement; float filtered_deriv; float output; uint8_t first_run; } PIDState; void PID_Init(PIDState *pid, float kp, float ki, float kd, float ts, float out_min, float out_max) { pid->kp = kp; pid->ki = ki; pid->kd = kd; pid->ts = ts; pid->out_min = out_min; pid->out_max = out_max; pid->filter_coeff = 0.1f; pid->setpoint = 0.0f; pid->integral = 0.0f; pid->prev_measurement = 0.0f; pid->filtered_deriv = 0.0f; pid->output = 0.0f; pid->first_run = 1; } void PID_SetSetpoint(PIDState *pid, float sp) { pid->setpoint = sp; } void PID_Reset(PIDState *pid) { pid->integral = 0.0f; pid->filtered_deriv = 0.0f; pid->first_run = 1; } float PID_Compute(PIDState *pid, float measurement) { float error, p_term, d_term, output_raw; float raw_deriv, integral_new; if (pid->first_run) { pid->prev_measurement = measurement; pid->first_run = 0; } error = pid->setpoint - measurement; // Пропорциональная p_term = pid->kp * error; // Интегральная (предварительный расчёт) integral_new = pid->integral + pid->ki * error * pid->ts; // Дифференциальная по измерению raw_deriv = -(measurement - pid->prev_measurement) / pid->ts; // Фильтр производной (IIR первого порядка) pid->filtered_deriv = pid->filter_coeff * raw_deriv + (1.0f - pid->filter_coeff) * pid->filtered_deriv; d_term = pid->kd * pid->filtered_deriv; // Суммируем output_raw = p_term + integral_new + d_term; // Ограничение выхода if (output_raw > pid->out_max) pid->output = pid->out_max; else if (output_raw < pid->out_min) pid->output = pid->out_min; else pid->output = output_raw; // Anti-windup: обновляем интеграл только если нет насыщения if (pid->output == output_raw) { pid->integral = integral_new; } else { // Back-calculation float saturation = output_raw - pid->output; pid->integral = integral_new - saturation; } pid->prev_measurement = measurement; return pid->output; } // Использование на STM32/Arduino (в прерывании таймера): PIDState temp_pid; void PID_ISR(void) // Вызывается каждые 100 мс { float measured_temp = read_temperature_sensor(); float heater_power = PID_Compute(&temp_pid, measured_temp); // Перевести в ШИМ 0-255 uint8_t pwm = (uint8_t)(heater_power * 255.0f / 100.0f); set_heater_pwm(pwm); } Диагностика плохой работы ПИДСимптом: Медленный выход на уставку, большая статическая ошибкаМало Kp и/или Ki Проверьте нет ли механических ограничений (клапан не открывается полностью) Проверьте масштабирование — правильно ли в % интерпретируется выход? Симптом: Сильные устойчивые колебанияKp слишком велик Ki слишком велик (самая частая причина!) Период дискретизации слишком большой относительно динамики объекта Симптом: Большое перерегулирование при изменении уставкиВелико Kp, увеличьте Kd Используйте "setpoint weighting": P-составляющую считайте как Kp × (w × SP – PV), где w < 1 Симптом: Шумный выход, дёргает исполнительный механизмШум датчика, увеличьте filter_coeff для фильтрации D Уменьшите Kd Добавьте мёртвую зону: не реагировать если |error| < deadband ЗаключениеПИД-регулятор — это не просто формула, это искусство. Одни и те же Kp, Ki, Kd дадут отличные результаты на одном объекте и катастрофу на другом. Понимание физики объекта управления важнее знания формул. Практический совет: начинайте с IMC-метода настройки — он даёт предсказуемые результаты и физический смысл у параметра lambda (желаемая скорость реакции). Используйте симуляцию перед внедрением. Добавляйте anti-windup всегда — без него реальная система будет вести себя непредсказуемо после насыщения. И помните: 80% задач управления решается PI-регулятором (без D). D добавляйте только когда PI действительно недостаточно и когда шум измерений не является проблемой. -
 Честный разговор об ArduinoArduino получил репутацию "игрушки для начинающих". Это несправедливо. Arduino — это доступная платформа с огромной экосистемой, которая используется в реальных устройствах, промышленных прототипах и мелкосерийном производстве. Да, у неё есть ограничения: 8-битный AVR, 16 МГц, 2 КБ RAM. Но для огромного класса задач этого более чем достаточно. Умный контроллер теплицы, анализатор вибраций, узел сбора данных, промышленный таймер — Arduino справится. Проблема не в платформе. Проблема в том, как большинство людей пишут код для Arduino. Сегодня покажу как писать Arduino-код правильно — как настоящие инженеры. Главная ошибка: delay()delay() — это яд для Arduino. Пока выполняется delay(1000), микроконтроллер ничего не делает. Не обрабатывает кнопки. Не читает датчики. Не обновляет выходы. Он просто спит. В реальном устройстве с несколькими задачами это неприемлемо. Правильный подход: millis() и конечный автомат// ПЛОХО — как делают 90% новичков: void loop() { digitalWrite(LED1, HIGH); delay(500); digitalWrite(LED1, LOW); delay(500); // Пока мигает LED1 — ничего другого не происходит! } // ХОРОШО — неблокирующий код: class BlinkTask { private: uint8_t pin; uint32_t interval; uint32_t lastToggle; bool state; public: BlinkTask(uint8_t _pin, uint32_t _interval) : pin(_pin), interval(_interval), lastToggle(0), state(false) {} void begin() { pinMode(pin, OUTPUT); } void update() { uint32_t now = millis(); if (now - lastToggle >= interval) { lastToggle = now; state = !state; digitalWrite(pin, state); } } }; BlinkTask led1(13, 500); // LED на пине 13, период 500 мс BlinkTask led2(12, 200); // LED на пине 12, период 200 мс void setup() { led1.begin(); led2.begin(); } void loop() { led1.update(); // Каждый вызов занимает микросекунды led2.update(); // Оба LED мигают независимо! // Здесь можно добавить ещё десятки задач } Антидребезг кнопок: правильная реализацияФизическая кнопка при нажатии/отпускании "дребезжит" — за несколько миллисекунд создаёт 10–50 ложных переключений. Простой delay(50) тут не поможет — он заблокирует программу. class Button { private: uint8_t pin; uint8_t currentState; uint8_t lastRawState; uint32_t lastChangeTime; uint32_t debounceTime; // Callbacks void (*onPress)(); void (*onRelease)(); void (*onLongPress)(); uint32_t pressTime; uint32_t longPressTime; bool longPressTriggered; public: Button(uint8_t _pin, uint32_t _debounce = 50, uint32_t _longPress = 1000) : pin(_pin), currentState(HIGH), lastRawState(HIGH), lastChangeTime(0), debounceTime(_debounce), onPress(nullptr), onRelease(nullptr), onLongPress(nullptr), pressTime(0), longPressTime(_longPress), longPressTriggered(false) {} void begin() { pinMode(pin, INPUT_PULLUP); // Внутренняя подтяжка, нажатие → LOW } void setOnPress(void (*cb)()) { onPress = cb; } void setOnRelease(void (*cb)()) { onRelease = cb; } void setOnLongPress(void (*cb)()){ onLongPress = cb; } bool isPressed() { return currentState == LOW; } void update() { uint32_t now = millis(); uint8_t rawState = digitalRead(pin); // Антидребезг: состояние должно держаться debounceTime мс if (rawState != lastRawState) { lastChangeTime = now; lastRawState = rawState; } if (now - lastChangeTime >= debounceTime) { if (rawState != currentState) { currentState = rawState; if (currentState == LOW) { // Нажата pressTime = now; longPressTriggered = false; if (onPress) onPress(); } else { // Отпущена if (onRelease) onRelease(); } } } // Проверка длинного нажатия if (currentState == LOW && !longPressTriggered) { if (now - pressTime >= longPressTime) { longPressTriggered = true; if (onLongPress) onLongPress(); } } } }; // Использование: Button btn1(2); Button btn2(3); int counter = 0; void onBtn1Press() { Serial.println("Кнопка 1 нажата"); counter++; } void onBtn1LongPress() { Serial.println("Длинное нажатие! Сброс"); counter = 0; } void onBtn2Press() { Serial.println("Кнопка 2 нажата"); counter--; } void setup() { Serial.begin(115200); btn1.begin(); btn2.begin(); btn1.setOnPress(onBtn1Press); btn1.setOnLongPress(onBtn1LongPress); btn2.setOnPress(onBtn2Press); } void loop() { btn1.update(); btn2.update(); // ... другие задачи } Конечный автомат (State Machine): управление процессомКонечный автомат — правильный способ описывать сложное поведение без вложенных if-else и флагов. Пример: автоматическая стиральная машина (упрощённо): enum WasherState { STATE_IDLE, STATE_FILL_WATER, STATE_WASH, STATE_DRAIN, STATE_SPIN, STATE_COMPLETE, STATE_ERROR }; enum WasherEvent { EVENT_START, EVENT_WATER_FULL, EVENT_WASH_DONE, EVENT_DRAIN_DONE, EVENT_SPIN_DONE, EVENT_ERROR, EVENT_RESET }; class WashingMachine { private: WasherState state; uint32_t stateEnterTime; uint32_t washDuration; uint32_t spinDuration; // Пины static const uint8_t PIN_VALVE = 4; // Клапан залива воды static const uint8_t PIN_PUMP = 5; // Насос откачки static const uint8_t PIN_MOTOR = 6; // Двигатель барабана static const uint8_t PIN_LED_RUN = 7; // Индикатор работы static const uint8_t PIN_SENSOR_FULL = 8; // Датчик полного бака void enterState(WasherState newState) { state = newState; stateEnterTime = millis(); // Действия при входе в состояние switch (state) { case STATE_IDLE: allOff(); Serial.println("Ожидание..."); break; case STATE_FILL_WATER: digitalWrite(PIN_VALVE, HIGH); Serial.println("Заполнение водой..."); break; case STATE_WASH: digitalWrite(PIN_VALVE, LOW); digitalWrite(PIN_MOTOR, HIGH); Serial.println("Стирка..."); break; case STATE_DRAIN: digitalWrite(PIN_MOTOR, LOW); digitalWrite(PIN_PUMP, HIGH); Serial.println("Слив воды..."); break; case STATE_SPIN: digitalWrite(PIN_PUMP, LOW); // Быстрое вращение для отжима analogWrite(PIN_MOTOR, 200); // 78% мощности Serial.println("Отжим..."); break; case STATE_COMPLETE: allOff(); Serial.println("Стирка завершена!"); break; case STATE_ERROR: allOff(); Serial.println("АВАРИЯ!"); break; } } void allOff() { digitalWrite(PIN_VALVE, LOW); digitalWrite(PIN_PUMP, LOW); digitalWrite(PIN_MOTOR, LOW); } public: WashingMachine(uint32_t _washMin = 30, uint32_t _spinMin = 5) : state(STATE_IDLE), washDuration(_washMin * 60000UL), spinDuration(_spinMin * 60000UL) {} void begin() { pinMode(PIN_VALVE, OUTPUT); pinMode(PIN_PUMP, OUTPUT); pinMode(PIN_MOTOR, OUTPUT); pinMode(PIN_LED_RUN, OUTPUT); pinMode(PIN_SENSOR_FULL, INPUT_PULLUP); allOff(); } void sendEvent(WasherEvent event) { switch (state) { case STATE_IDLE: if (event == EVENT_START) enterState(STATE_FILL_WATER); break; case STATE_FILL_WATER: if (event == EVENT_WATER_FULL) enterState(STATE_WASH); if (event == EVENT_ERROR) enterState(STATE_ERROR); break; case STATE_WASH: if (event == EVENT_WASH_DONE) enterState(STATE_DRAIN); if (event == EVENT_ERROR) enterState(STATE_ERROR); break; case STATE_DRAIN: if (event == EVENT_DRAIN_DONE) enterState(STATE_SPIN); if (event == EVENT_ERROR) enterState(STATE_ERROR); break; case STATE_SPIN: if (event == EVENT_SPIN_DONE) enterState(STATE_COMPLETE); break; case STATE_ERROR: if (event == EVENT_RESET) enterState(STATE_IDLE); break; default: break; } } // Вызывать в loop() каждый цикл void update() { uint32_t elapsed = millis() - stateEnterTime; // Индикатор работы bool running = (state != STATE_IDLE && state != STATE_COMPLETE && state != STATE_ERROR); digitalWrite(PIN_LED_RUN, running ? (millis() % 500 < 250) : LOW); switch (state) { case STATE_FILL_WATER: // Проверяем датчик уровня if (digitalRead(PIN_SENSOR_FULL) == LOW) { sendEvent(EVENT_WATER_FULL); } // Таймаут заполнения 10 минут if (elapsed > 600000UL) { sendEvent(EVENT_ERROR); } break; case STATE_WASH: if (elapsed >= washDuration) { sendEvent(EVENT_WASH_DONE); } break; case STATE_DRAIN: // 3 минуты на слив if (elapsed >= 180000UL) { sendEvent(EVENT_DRAIN_DONE); } break; case STATE_SPIN: if (elapsed >= spinDuration) { sendEvent(EVENT_SPIN_DONE); } break; default: break; } } WasherState getState() { return state; } }; WashingMachine washer(30, 5); // 30 мин стирка, 5 мин отжим Button startBtn(2); void setup() { Serial.begin(115200); washer.begin(); startBtn.begin(); startBtn.setOnPress([]() { washer.sendEvent(EVENT_START); }); } void loop() { washer.update(); startBtn.update(); } ПИД-регулятор: управление температуройclass PIDController { private: float kp, ki, kd; float setpoint; float integral; float prevError; float integralLimit; float outputMin, outputMax; uint32_t lastTime; public: PIDController(float _kp, float _ki, float _kd, float _outMin = 0.0f, float _outMax = 100.0f) : kp(_kp), ki(_ki), kd(_kd), setpoint(0), integral(0), prevError(0), integralLimit(50.0f), outputMin(_outMin), outputMax(_outMax), lastTime(0) {} void setSetpoint(float sp) { setpoint = sp; } void reset() { integral = 0; prevError = 0; } float compute(float measured) { uint32_t now = millis(); float dt = (now - lastTime) / 1000.0f; // Секунды lastTime = now; if (dt <= 0 || dt > 1.0f) dt = 0.1f; // Защита от аномальных dt float error = setpoint - measured; // Интегральная составляющая с ограничением (anti-windup) integral += error * dt; integral = constrain(integral, -integralLimit, integralLimit); // Производная (фильтруем шум — берём производную измерения, не ошибки) float derivative = -(measured - prevError) / dt; // -d(PV)/dt prevError = measured; float output = kp * error + ki * integral + kd * derivative; return constrain(output, outputMin, outputMax); } }; // Применение: ПИД-термостат с твёрдотельным реле (SSR) const uint8_t PIN_HEATER = 9; // ШИМ-выход на SSR const uint8_t PIN_TEMP_SCL = A4; // I2C — датчик температуры const uint8_t PIN_TEMP_SDA = A5; PIDController tempPID(2.0f, 0.5f, 1.0f, 0.0f, 255.0f); float readTemperature() { // Здесь чтение датчика DS18B20 или термопары MAX6675 // Возвращаем демо-значение: return 25.0f + random(-10, 10) / 10.0f; } void setup() { Serial.begin(115200); pinMode(PIN_HEATER, OUTPUT); tempPID.setSetpoint(75.0f); // Уставка 75°C } void loop() { static uint32_t lastPID = 0; if (millis() - lastPID >= 500) { // ПИД каждые 500 мс lastPID = millis(); float temp = readTemperature(); float output = tempPID.compute(temp); analogWrite(PIN_HEATER, (uint8_t)output); Serial.print("T="); Serial.print(temp, 1); Serial.print("°C SP=75°C OUT="); Serial.print((int)output * 100 / 255); Serial.println("%"); } } Modbus RTU Slave на Arduino#include <SoftwareSerial.h> // RS-485 через MAX485 SoftwareSerial rs485(10, 11); // RX, TX const uint8_t DE_RE_PIN = 4; // Driver Enable / Receiver Enable // Данные устройства (10 Holding Registers) uint16_t holdingRegs[10] = {0}; uint16_t inputRegs[10] = {0}; const uint8_t DEVICE_ADDRESS = 1; uint16_t crc16(uint8_t *buf, uint16_t len) { uint16_t crc = 0xFFFF; for (uint16_t i = 0; i < len; i++) { crc ^= buf[i]; for (uint8_t j = 0; j < 8; j++) { crc = (crc & 1) ? ((crc >> 1) ^ 0xA001) : (crc >> 1); } } return crc; } void rs485Send(uint8_t *data, uint8_t len) { digitalWrite(DE_RE_PIN, HIGH); // Режим передачи delayMicroseconds(100); rs485.write(data, len); rs485.flush(); delayMicroseconds(100); digitalWrite(DE_RE_PIN, LOW); // Режим приёма } void processModbus(uint8_t *req, uint8_t len) { if (req[0] != DEVICE_ADDRESS) return; uint16_t rxCRC = (req[len-1] << 8) | req[len-2]; if (crc16(req, len-2) != rxCRC) return; uint8_t resp[64]; uint8_t rlen = 0; uint8_t fc = req[1]; uint16_t addr = (req[2] << 8) | req[3]; uint16_t count = (req[4] << 8) | req[5]; resp[rlen++] = DEVICE_ADDRESS; resp[rlen++] = fc; if (fc == 0x03 && addr + count <= 10) { // Read Holding Registers resp[rlen++] = count * 2; for (uint16_t i = 0; i < count; i++) { resp[rlen++] = holdingRegs[addr + i] >> 8; resp[rlen++] = holdingRegs[addr + i] & 0xFF; } } else if (fc == 0x04 && addr + count <= 10) { // Read Input Registers resp[rlen++] = count * 2; for (uint16_t i = 0; i < count; i++) { resp[rlen++] = inputRegs[addr + i] >> 8; resp[rlen++] = inputRegs[addr + i] & 0xFF; } } else if (fc == 0x06 && addr < 10) { // Write Single Register holdingRegs[addr] = (req[4] << 8) | req[5]; memcpy(resp + 2, req + 2, 4); rlen += 4; } else { resp[1] |= 0x80; resp[rlen++] = (fc == 0x03 || fc == 0x04 || fc == 0x06) ? 0x02 : 0x01; } uint16_t c = crc16(resp, rlen); resp[rlen++] = c & 0xFF; resp[rlen++] = c >> 8; rs485Send(resp, rlen); } void setup() { Serial.begin(115200); rs485.begin(9600); pinMode(DE_RE_PIN, OUTPUT); digitalWrite(DE_RE_PIN, LOW); // Режим приёма по умолчанию } void loop() { // Обновляем Input Registers реальными данными inputRegs[0] = analogRead(A0); // Аналоговый вход 0-1023 inputRegs[1] = (uint16_t)(millis() / 1000); // Uptime в секундах // Принимаем Modbus-запросы static uint8_t rxBuf[64]; static uint8_t rxLen = 0; static uint32_t lastByte = 0; while (rs485.available()) { if (rxLen < sizeof(rxBuf)) { rxBuf[rxLen++] = rs485.read(); } lastByte = millis(); } // Конец фрейма — пауза 3.5 символа (при 9600 бод ~4 мс) if (rxLen > 0 && millis() - lastByte > 4) { processModbus(rxBuf, rxLen); rxLen = 0; } } Работа с несколькими датчиками I2C#include <Wire.h> #include <Adafruit_BMP280.h> #include <Adafruit_SHT31.h> #include <RTC_DS3231.h> Adafruit_BMP280 bmp; Adafruit_SHT31 sht; RTC_DS3231 rtc; struct SensorData { float temperature_bmp; float pressure_hpa; float temperature_sht; float humidity; uint32_t timestamp; bool bmp_ok; bool sht_ok; }; SensorData readAllSensors() { SensorData data = {0}; data.timestamp = rtc.now().unixtime(); // BMP280: давление и температура if (bmp.begin(0x76)) { data.temperature_bmp = bmp.readTemperature(); data.pressure_hpa = bmp.readPressure() / 100.0f; data.bmp_ok = true; } // SHT31: температура и влажность if (sht.begin(0x44)) { data.temperature_sht = sht.readTemperature(); data.humidity = sht.readHumidity(); data.sht_ok = (!isnan(data.temperature_sht)); } return data; } void printSensorData(const SensorData& d) { Serial.print("T1="); Serial.print(d.temperature_bmp, 1); Serial.print("°C "); Serial.print("P="); Serial.print(d.pressure_hpa, 1); Serial.print("гПа "); Serial.print("T2="); Serial.print(d.temperature_sht, 1); Serial.print("°C "); Serial.print("H="); Serial.print(d.humidity, 1); Serial.println("%"); } void setup() { Serial.begin(115200); Wire.begin(); Wire.setClock(400000); // Fast mode 400 кГц if (!bmp.begin(0x76)) Serial.println("BMP280 не найден!"); if (!sht.begin(0x44)) Serial.println("SHT31 не найден!"); if (!rtc.begin()) Serial.println("DS3231 не найден!"); } void loop() { static uint32_t lastRead = 0; if (millis() - lastRead >= 5000) { // Каждые 5 секунд lastRead = millis(); SensorData data = readAllSensors(); printSensorData(data); } } Запись данных на SD-карту#include <SPI.h> #include <SD.h> const uint8_t SD_CS_PIN = 10; bool sdAvailable = false; void sdInit() { sdAvailable = SD.begin(SD_CS_PIN); if (!sdAvailable) { Serial.println("SD-карта не найдена!"); } else { Serial.println("SD-карта готова."); } } void logData(const String& filename, float temp, float humidity, uint32_t timestamp) { if (!sdAvailable) return; File file = SD.open(filename, FILE_WRITE); if (!file) { Serial.println("Ошибка открытия файла!"); return; } // CSV-формат file.print(timestamp); file.print(','); file.print(temp, 2); file.print(','); file.println(humidity, 2); file.close(); } // Создание нового файла каждый день String getDailyFilename(uint32_t unixtime) { // Простой расчёт дня uint32_t day = unixtime / 86400; return "LOG_" + String(day) + ".CSV"; } Советы по надёжности Arduino-проектов1. Сторожевой таймер (Watchdog)#include <avr/wdt.h> void setup() { wdt_enable(WDTO_2S); // Сброс если loop() не выполняется 2 секунды } void loop() { wdt_reset(); // Сброс таймера — "я ещё живой" // ... ваш код } 2. EEPROM для сохранения настроек#include <EEPROM.h> struct Settings { float setpoint; uint16_t interval; uint8_t mode; uint16_t checksum; }; void saveSettings(const Settings& s) { Settings toSave = s; // Простая контрольная сумма toSave.checksum = (uint16_t)(s.setpoint * 100) + s.interval + s.mode; EEPROM.put(0, toSave); } bool loadSettings(Settings& s) { EEPROM.get(0, s); uint16_t expected = (uint16_t)(s.setpoint * 100) + s.interval + s.mode; return (s.checksum == expected); // Данные корректны? } 3. Ограничение частоты Serial// НЕ ПИШИТЕ В Serial КАЖДЫЙ ЦИКЛ LOOP! // При 115200 бод запись 100 байт занимает ~8мс void printPeriodic(float value) { static uint32_t lastPrint = 0; if (millis() - lastPrint >= 200) { // Максимум 5 раз в секунду lastPrint = millis(); Serial.println(value); } } ЗаключениеArduino — это не учебная игрушка, это платформа. Разница между "поделкой" и "устройством" — не в железе, а в качестве кода. Ключевые принципы: никогда не используйте delay() в итоговом устройстве, структурируйте код как набор независимых задач через millis(), используйте конечные автоматы для сложной логики, добавляйте watchdog timer и защиты, документируйте код. С этими принципами Arduino становится полноценным инструментом для создания надёжных устройств — от умного дома до промышленных узлов сбора данных.
Честный разговор об ArduinoArduino получил репутацию "игрушки для начинающих". Это несправедливо. Arduino — это доступная платформа с огромной экосистемой, которая используется в реальных устройствах, промышленных прототипах и мелкосерийном производстве. Да, у неё есть ограничения: 8-битный AVR, 16 МГц, 2 КБ RAM. Но для огромного класса задач этого более чем достаточно. Умный контроллер теплицы, анализатор вибраций, узел сбора данных, промышленный таймер — Arduino справится. Проблема не в платформе. Проблема в том, как большинство людей пишут код для Arduino. Сегодня покажу как писать Arduino-код правильно — как настоящие инженеры. Главная ошибка: delay()delay() — это яд для Arduino. Пока выполняется delay(1000), микроконтроллер ничего не делает. Не обрабатывает кнопки. Не читает датчики. Не обновляет выходы. Он просто спит. В реальном устройстве с несколькими задачами это неприемлемо. Правильный подход: millis() и конечный автомат// ПЛОХО — как делают 90% новичков: void loop() { digitalWrite(LED1, HIGH); delay(500); digitalWrite(LED1, LOW); delay(500); // Пока мигает LED1 — ничего другого не происходит! } // ХОРОШО — неблокирующий код: class BlinkTask { private: uint8_t pin; uint32_t interval; uint32_t lastToggle; bool state; public: BlinkTask(uint8_t _pin, uint32_t _interval) : pin(_pin), interval(_interval), lastToggle(0), state(false) {} void begin() { pinMode(pin, OUTPUT); } void update() { uint32_t now = millis(); if (now - lastToggle >= interval) { lastToggle = now; state = !state; digitalWrite(pin, state); } } }; BlinkTask led1(13, 500); // LED на пине 13, период 500 мс BlinkTask led2(12, 200); // LED на пине 12, период 200 мс void setup() { led1.begin(); led2.begin(); } void loop() { led1.update(); // Каждый вызов занимает микросекунды led2.update(); // Оба LED мигают независимо! // Здесь можно добавить ещё десятки задач } Антидребезг кнопок: правильная реализацияФизическая кнопка при нажатии/отпускании "дребезжит" — за несколько миллисекунд создаёт 10–50 ложных переключений. Простой delay(50) тут не поможет — он заблокирует программу. class Button { private: uint8_t pin; uint8_t currentState; uint8_t lastRawState; uint32_t lastChangeTime; uint32_t debounceTime; // Callbacks void (*onPress)(); void (*onRelease)(); void (*onLongPress)(); uint32_t pressTime; uint32_t longPressTime; bool longPressTriggered; public: Button(uint8_t _pin, uint32_t _debounce = 50, uint32_t _longPress = 1000) : pin(_pin), currentState(HIGH), lastRawState(HIGH), lastChangeTime(0), debounceTime(_debounce), onPress(nullptr), onRelease(nullptr), onLongPress(nullptr), pressTime(0), longPressTime(_longPress), longPressTriggered(false) {} void begin() { pinMode(pin, INPUT_PULLUP); // Внутренняя подтяжка, нажатие → LOW } void setOnPress(void (*cb)()) { onPress = cb; } void setOnRelease(void (*cb)()) { onRelease = cb; } void setOnLongPress(void (*cb)()){ onLongPress = cb; } bool isPressed() { return currentState == LOW; } void update() { uint32_t now = millis(); uint8_t rawState = digitalRead(pin); // Антидребезг: состояние должно держаться debounceTime мс if (rawState != lastRawState) { lastChangeTime = now; lastRawState = rawState; } if (now - lastChangeTime >= debounceTime) { if (rawState != currentState) { currentState = rawState; if (currentState == LOW) { // Нажата pressTime = now; longPressTriggered = false; if (onPress) onPress(); } else { // Отпущена if (onRelease) onRelease(); } } } // Проверка длинного нажатия if (currentState == LOW && !longPressTriggered) { if (now - pressTime >= longPressTime) { longPressTriggered = true; if (onLongPress) onLongPress(); } } } }; // Использование: Button btn1(2); Button btn2(3); int counter = 0; void onBtn1Press() { Serial.println("Кнопка 1 нажата"); counter++; } void onBtn1LongPress() { Serial.println("Длинное нажатие! Сброс"); counter = 0; } void onBtn2Press() { Serial.println("Кнопка 2 нажата"); counter--; } void setup() { Serial.begin(115200); btn1.begin(); btn2.begin(); btn1.setOnPress(onBtn1Press); btn1.setOnLongPress(onBtn1LongPress); btn2.setOnPress(onBtn2Press); } void loop() { btn1.update(); btn2.update(); // ... другие задачи } Конечный автомат (State Machine): управление процессомКонечный автомат — правильный способ описывать сложное поведение без вложенных if-else и флагов. Пример: автоматическая стиральная машина (упрощённо): enum WasherState { STATE_IDLE, STATE_FILL_WATER, STATE_WASH, STATE_DRAIN, STATE_SPIN, STATE_COMPLETE, STATE_ERROR }; enum WasherEvent { EVENT_START, EVENT_WATER_FULL, EVENT_WASH_DONE, EVENT_DRAIN_DONE, EVENT_SPIN_DONE, EVENT_ERROR, EVENT_RESET }; class WashingMachine { private: WasherState state; uint32_t stateEnterTime; uint32_t washDuration; uint32_t spinDuration; // Пины static const uint8_t PIN_VALVE = 4; // Клапан залива воды static const uint8_t PIN_PUMP = 5; // Насос откачки static const uint8_t PIN_MOTOR = 6; // Двигатель барабана static const uint8_t PIN_LED_RUN = 7; // Индикатор работы static const uint8_t PIN_SENSOR_FULL = 8; // Датчик полного бака void enterState(WasherState newState) { state = newState; stateEnterTime = millis(); // Действия при входе в состояние switch (state) { case STATE_IDLE: allOff(); Serial.println("Ожидание..."); break; case STATE_FILL_WATER: digitalWrite(PIN_VALVE, HIGH); Serial.println("Заполнение водой..."); break; case STATE_WASH: digitalWrite(PIN_VALVE, LOW); digitalWrite(PIN_MOTOR, HIGH); Serial.println("Стирка..."); break; case STATE_DRAIN: digitalWrite(PIN_MOTOR, LOW); digitalWrite(PIN_PUMP, HIGH); Serial.println("Слив воды..."); break; case STATE_SPIN: digitalWrite(PIN_PUMP, LOW); // Быстрое вращение для отжима analogWrite(PIN_MOTOR, 200); // 78% мощности Serial.println("Отжим..."); break; case STATE_COMPLETE: allOff(); Serial.println("Стирка завершена!"); break; case STATE_ERROR: allOff(); Serial.println("АВАРИЯ!"); break; } } void allOff() { digitalWrite(PIN_VALVE, LOW); digitalWrite(PIN_PUMP, LOW); digitalWrite(PIN_MOTOR, LOW); } public: WashingMachine(uint32_t _washMin = 30, uint32_t _spinMin = 5) : state(STATE_IDLE), washDuration(_washMin * 60000UL), spinDuration(_spinMin * 60000UL) {} void begin() { pinMode(PIN_VALVE, OUTPUT); pinMode(PIN_PUMP, OUTPUT); pinMode(PIN_MOTOR, OUTPUT); pinMode(PIN_LED_RUN, OUTPUT); pinMode(PIN_SENSOR_FULL, INPUT_PULLUP); allOff(); } void sendEvent(WasherEvent event) { switch (state) { case STATE_IDLE: if (event == EVENT_START) enterState(STATE_FILL_WATER); break; case STATE_FILL_WATER: if (event == EVENT_WATER_FULL) enterState(STATE_WASH); if (event == EVENT_ERROR) enterState(STATE_ERROR); break; case STATE_WASH: if (event == EVENT_WASH_DONE) enterState(STATE_DRAIN); if (event == EVENT_ERROR) enterState(STATE_ERROR); break; case STATE_DRAIN: if (event == EVENT_DRAIN_DONE) enterState(STATE_SPIN); if (event == EVENT_ERROR) enterState(STATE_ERROR); break; case STATE_SPIN: if (event == EVENT_SPIN_DONE) enterState(STATE_COMPLETE); break; case STATE_ERROR: if (event == EVENT_RESET) enterState(STATE_IDLE); break; default: break; } } // Вызывать в loop() каждый цикл void update() { uint32_t elapsed = millis() - stateEnterTime; // Индикатор работы bool running = (state != STATE_IDLE && state != STATE_COMPLETE && state != STATE_ERROR); digitalWrite(PIN_LED_RUN, running ? (millis() % 500 < 250) : LOW); switch (state) { case STATE_FILL_WATER: // Проверяем датчик уровня if (digitalRead(PIN_SENSOR_FULL) == LOW) { sendEvent(EVENT_WATER_FULL); } // Таймаут заполнения 10 минут if (elapsed > 600000UL) { sendEvent(EVENT_ERROR); } break; case STATE_WASH: if (elapsed >= washDuration) { sendEvent(EVENT_WASH_DONE); } break; case STATE_DRAIN: // 3 минуты на слив if (elapsed >= 180000UL) { sendEvent(EVENT_DRAIN_DONE); } break; case STATE_SPIN: if (elapsed >= spinDuration) { sendEvent(EVENT_SPIN_DONE); } break; default: break; } } WasherState getState() { return state; } }; WashingMachine washer(30, 5); // 30 мин стирка, 5 мин отжим Button startBtn(2); void setup() { Serial.begin(115200); washer.begin(); startBtn.begin(); startBtn.setOnPress([]() { washer.sendEvent(EVENT_START); }); } void loop() { washer.update(); startBtn.update(); } ПИД-регулятор: управление температуройclass PIDController { private: float kp, ki, kd; float setpoint; float integral; float prevError; float integralLimit; float outputMin, outputMax; uint32_t lastTime; public: PIDController(float _kp, float _ki, float _kd, float _outMin = 0.0f, float _outMax = 100.0f) : kp(_kp), ki(_ki), kd(_kd), setpoint(0), integral(0), prevError(0), integralLimit(50.0f), outputMin(_outMin), outputMax(_outMax), lastTime(0) {} void setSetpoint(float sp) { setpoint = sp; } void reset() { integral = 0; prevError = 0; } float compute(float measured) { uint32_t now = millis(); float dt = (now - lastTime) / 1000.0f; // Секунды lastTime = now; if (dt <= 0 || dt > 1.0f) dt = 0.1f; // Защита от аномальных dt float error = setpoint - measured; // Интегральная составляющая с ограничением (anti-windup) integral += error * dt; integral = constrain(integral, -integralLimit, integralLimit); // Производная (фильтруем шум — берём производную измерения, не ошибки) float derivative = -(measured - prevError) / dt; // -d(PV)/dt prevError = measured; float output = kp * error + ki * integral + kd * derivative; return constrain(output, outputMin, outputMax); } }; // Применение: ПИД-термостат с твёрдотельным реле (SSR) const uint8_t PIN_HEATER = 9; // ШИМ-выход на SSR const uint8_t PIN_TEMP_SCL = A4; // I2C — датчик температуры const uint8_t PIN_TEMP_SDA = A5; PIDController tempPID(2.0f, 0.5f, 1.0f, 0.0f, 255.0f); float readTemperature() { // Здесь чтение датчика DS18B20 или термопары MAX6675 // Возвращаем демо-значение: return 25.0f + random(-10, 10) / 10.0f; } void setup() { Serial.begin(115200); pinMode(PIN_HEATER, OUTPUT); tempPID.setSetpoint(75.0f); // Уставка 75°C } void loop() { static uint32_t lastPID = 0; if (millis() - lastPID >= 500) { // ПИД каждые 500 мс lastPID = millis(); float temp = readTemperature(); float output = tempPID.compute(temp); analogWrite(PIN_HEATER, (uint8_t)output); Serial.print("T="); Serial.print(temp, 1); Serial.print("°C SP=75°C OUT="); Serial.print((int)output * 100 / 255); Serial.println("%"); } } Modbus RTU Slave на Arduino#include <SoftwareSerial.h> // RS-485 через MAX485 SoftwareSerial rs485(10, 11); // RX, TX const uint8_t DE_RE_PIN = 4; // Driver Enable / Receiver Enable // Данные устройства (10 Holding Registers) uint16_t holdingRegs[10] = {0}; uint16_t inputRegs[10] = {0}; const uint8_t DEVICE_ADDRESS = 1; uint16_t crc16(uint8_t *buf, uint16_t len) { uint16_t crc = 0xFFFF; for (uint16_t i = 0; i < len; i++) { crc ^= buf[i]; for (uint8_t j = 0; j < 8; j++) { crc = (crc & 1) ? ((crc >> 1) ^ 0xA001) : (crc >> 1); } } return crc; } void rs485Send(uint8_t *data, uint8_t len) { digitalWrite(DE_RE_PIN, HIGH); // Режим передачи delayMicroseconds(100); rs485.write(data, len); rs485.flush(); delayMicroseconds(100); digitalWrite(DE_RE_PIN, LOW); // Режим приёма } void processModbus(uint8_t *req, uint8_t len) { if (req[0] != DEVICE_ADDRESS) return; uint16_t rxCRC = (req[len-1] << 8) | req[len-2]; if (crc16(req, len-2) != rxCRC) return; uint8_t resp[64]; uint8_t rlen = 0; uint8_t fc = req[1]; uint16_t addr = (req[2] << 8) | req[3]; uint16_t count = (req[4] << 8) | req[5]; resp[rlen++] = DEVICE_ADDRESS; resp[rlen++] = fc; if (fc == 0x03 && addr + count <= 10) { // Read Holding Registers resp[rlen++] = count * 2; for (uint16_t i = 0; i < count; i++) { resp[rlen++] = holdingRegs[addr + i] >> 8; resp[rlen++] = holdingRegs[addr + i] & 0xFF; } } else if (fc == 0x04 && addr + count <= 10) { // Read Input Registers resp[rlen++] = count * 2; for (uint16_t i = 0; i < count; i++) { resp[rlen++] = inputRegs[addr + i] >> 8; resp[rlen++] = inputRegs[addr + i] & 0xFF; } } else if (fc == 0x06 && addr < 10) { // Write Single Register holdingRegs[addr] = (req[4] << 8) | req[5]; memcpy(resp + 2, req + 2, 4); rlen += 4; } else { resp[1] |= 0x80; resp[rlen++] = (fc == 0x03 || fc == 0x04 || fc == 0x06) ? 0x02 : 0x01; } uint16_t c = crc16(resp, rlen); resp[rlen++] = c & 0xFF; resp[rlen++] = c >> 8; rs485Send(resp, rlen); } void setup() { Serial.begin(115200); rs485.begin(9600); pinMode(DE_RE_PIN, OUTPUT); digitalWrite(DE_RE_PIN, LOW); // Режим приёма по умолчанию } void loop() { // Обновляем Input Registers реальными данными inputRegs[0] = analogRead(A0); // Аналоговый вход 0-1023 inputRegs[1] = (uint16_t)(millis() / 1000); // Uptime в секундах // Принимаем Modbus-запросы static uint8_t rxBuf[64]; static uint8_t rxLen = 0; static uint32_t lastByte = 0; while (rs485.available()) { if (rxLen < sizeof(rxBuf)) { rxBuf[rxLen++] = rs485.read(); } lastByte = millis(); } // Конец фрейма — пауза 3.5 символа (при 9600 бод ~4 мс) if (rxLen > 0 && millis() - lastByte > 4) { processModbus(rxBuf, rxLen); rxLen = 0; } } Работа с несколькими датчиками I2C#include <Wire.h> #include <Adafruit_BMP280.h> #include <Adafruit_SHT31.h> #include <RTC_DS3231.h> Adafruit_BMP280 bmp; Adafruit_SHT31 sht; RTC_DS3231 rtc; struct SensorData { float temperature_bmp; float pressure_hpa; float temperature_sht; float humidity; uint32_t timestamp; bool bmp_ok; bool sht_ok; }; SensorData readAllSensors() { SensorData data = {0}; data.timestamp = rtc.now().unixtime(); // BMP280: давление и температура if (bmp.begin(0x76)) { data.temperature_bmp = bmp.readTemperature(); data.pressure_hpa = bmp.readPressure() / 100.0f; data.bmp_ok = true; } // SHT31: температура и влажность if (sht.begin(0x44)) { data.temperature_sht = sht.readTemperature(); data.humidity = sht.readHumidity(); data.sht_ok = (!isnan(data.temperature_sht)); } return data; } void printSensorData(const SensorData& d) { Serial.print("T1="); Serial.print(d.temperature_bmp, 1); Serial.print("°C "); Serial.print("P="); Serial.print(d.pressure_hpa, 1); Serial.print("гПа "); Serial.print("T2="); Serial.print(d.temperature_sht, 1); Serial.print("°C "); Serial.print("H="); Serial.print(d.humidity, 1); Serial.println("%"); } void setup() { Serial.begin(115200); Wire.begin(); Wire.setClock(400000); // Fast mode 400 кГц if (!bmp.begin(0x76)) Serial.println("BMP280 не найден!"); if (!sht.begin(0x44)) Serial.println("SHT31 не найден!"); if (!rtc.begin()) Serial.println("DS3231 не найден!"); } void loop() { static uint32_t lastRead = 0; if (millis() - lastRead >= 5000) { // Каждые 5 секунд lastRead = millis(); SensorData data = readAllSensors(); printSensorData(data); } } Запись данных на SD-карту#include <SPI.h> #include <SD.h> const uint8_t SD_CS_PIN = 10; bool sdAvailable = false; void sdInit() { sdAvailable = SD.begin(SD_CS_PIN); if (!sdAvailable) { Serial.println("SD-карта не найдена!"); } else { Serial.println("SD-карта готова."); } } void logData(const String& filename, float temp, float humidity, uint32_t timestamp) { if (!sdAvailable) return; File file = SD.open(filename, FILE_WRITE); if (!file) { Serial.println("Ошибка открытия файла!"); return; } // CSV-формат file.print(timestamp); file.print(','); file.print(temp, 2); file.print(','); file.println(humidity, 2); file.close(); } // Создание нового файла каждый день String getDailyFilename(uint32_t unixtime) { // Простой расчёт дня uint32_t day = unixtime / 86400; return "LOG_" + String(day) + ".CSV"; } Советы по надёжности Arduino-проектов1. Сторожевой таймер (Watchdog)#include <avr/wdt.h> void setup() { wdt_enable(WDTO_2S); // Сброс если loop() не выполняется 2 секунды } void loop() { wdt_reset(); // Сброс таймера — "я ещё живой" // ... ваш код } 2. EEPROM для сохранения настроек#include <EEPROM.h> struct Settings { float setpoint; uint16_t interval; uint8_t mode; uint16_t checksum; }; void saveSettings(const Settings& s) { Settings toSave = s; // Простая контрольная сумма toSave.checksum = (uint16_t)(s.setpoint * 100) + s.interval + s.mode; EEPROM.put(0, toSave); } bool loadSettings(Settings& s) { EEPROM.get(0, s); uint16_t expected = (uint16_t)(s.setpoint * 100) + s.interval + s.mode; return (s.checksum == expected); // Данные корректны? } 3. Ограничение частоты Serial// НЕ ПИШИТЕ В Serial КАЖДЫЙ ЦИКЛ LOOP! // При 115200 бод запись 100 байт занимает ~8мс void printPeriodic(float value) { static uint32_t lastPrint = 0; if (millis() - lastPrint >= 200) { // Максимум 5 раз в секунду lastPrint = millis(); Serial.println(value); } } ЗаключениеArduino — это не учебная игрушка, это платформа. Разница между "поделкой" и "устройством" — не в железе, а в качестве кода. Ключевые принципы: никогда не используйте delay() в итоговом устройстве, структурируйте код как набор независимых задач через millis(), используйте конечные автоматы для сложной логики, добавляйте watchdog timer и защиты, документируйте код. С этими принципами Arduino становится полноценным инструментом для создания надёжных устройств — от умного дома до промышленных узлов сбора данных. -
 Почему STM32, а не продолжать на ArduinoArduino — отличный старт. Но в какой-то момент вы упираетесь в потолок: скорость 16 МГц не хватает, Flash/RAM заканчивается, нужны возможности которых у AVR нет — несколько UART, USB Device, Ethernet MAC, криптоускоритель, DSP-инструкции. STM32 — это семейство 32-битных микроконтроллеров от STMicroelectronics на базе ядер ARM Cortex-M. Характеристики даже бюджетного STM32F103C8T6 ("Blue Pill"): Параметр Arduino Uno (ATmega328P) STM32F103C8T6 Ядро AVR 8-бит ARM Cortex-M3 32-бит Тактовая частота 16 МГц 72 МГц Flash 32 КБ 64 КБ RAM 2 КБ 20 КБ GPIO 23 37 ADC 6 × 10-бит 10 × 12-бит Таймеры 3 7 SPI / I2C / UART 1 / 1 / 1 2 / 2 / 3 USB Нет Full-Speed USB 2.0 Цена ~$3–5 (оригинал) ~$0.8–2 И это самый простой STM32. Линейки F4, F7, H7 — ещё на порядок мощнее. Семейства STM32: как не запутатьсяSTM32 делится на несколько линеек по ядру и позиционированию: STM32F0/F1/F3 — Базовые (Cortex-M0/M3/M4) F103: самый популярный, "Blue Pill", 72 МГц — идеален для старта F303: F3 с матфлоатом и операционными усилителями внутри F030/F042: ультрадешёвые, от $0.3, для массового производства STM32F4 — Производительные (Cortex-M4F с FPU) F401/F411: 84–100 МГц, USB, хороший баланс F407/F429: 168 МГц, Ethernet MAC, FMC для внешней SDRAM, камеры Популярны для DSP-задач, аудио, обработки изображений STM32F7/H7 — Высокопроизводительные (Cortex-M7) H743: 480 МГц, двойная точность float, L1-кэш, умереть не встать Используются в промышленных системах реального времени STM32L — Низкое энергопотребление (Low Power) L051/L071: ток в sleep < 1 мкА, для батарейных устройств STM32G/U — Новые серии (2019–2022) G431/G474: отличные для силовой электроники (Timer1 с мёртвым временем) U5: Cortex-M33 с TrustZone, IoT-безопасность Рекомендации для старта: STM32F103C8T6 (Blue Pill) или STM32G031 для новых проектов. Настройка среды разработкиSTM32CubeIDE + STM32CubeMXSTM32CubeIDE — официальная бесплатная среда от ST. Включает: Eclipse-based IDE Компилятор GCC ARM OpenOCD для программирования/отладки Встроенный STM32CubeMX для генерации кода инициализации Установка: Скачать STM32CubeIDE с сайта st.com (требует регистрации, бесплатно) Установить, выбрать пакеты для нужных семейств Подключить программатор ST-Link V2 ($3–5 на AliExpress) Первое подключение (Blue Pill → ST-Link V2):ST-Link V2 Blue Pill SWDIO → PA13 SWCLK → PA14 GND → GND 3.3V → 3V3 Важно: На оригинальных Blue Pill загрузчик прошит неправильно. Для работы с ST-Link через SWD это не проблема — программируем напрямую в flash. HAL vs LL: что выбратьSTMicroelectronics предоставляет два уровня библиотек: HAL (Hardware Abstraction Layer): Высокоуровневый, максимально переносимый код Автоматически генерируется CubeMX Проще в использовании, больше overhead Рекомендуется для большинства проектов LL (Low Layer): Тонкие обёртки над регистрами, почти без overhead Максимальная производительность и предсказуемость Нужно хорошее знание периферии Для критичного по времени кода Смешанный подход (лучший для опытных): HAL для инициализации (CubeMX генерирует) LL для критичных по времени операций в прерываниях GPIO: мигаем светодиодом правильноCubeMX генерирует такой код инициализации GPIO: // Автосгенерированный код CubeMX static void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct = {0}; __HAL_RCC_GPIOC_CLK_ENABLE(); // Включаем тактирование порта C // Настройка PC13 как выход (встроенный LED на Blue Pill) GPIO_InitStruct.Pin = GPIO_PIN_13; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // Push-Pull выход GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; // 2 МГц, достаточно для LED HAL_GPIO_Init(GPIOC, &GPIO_InitStruct); // Входной сигнал на PA0 (кнопка) GPIO_InitStruct.Pin = GPIO_PIN_0; GPIO_InitStruct.Mode = GPIO_MODE_INPUT; GPIO_InitStruct.Pull = GPIO_PULLUP; // Внутренний pull-up HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); } Управление GPIO в программе: // Включить / выключить / переключить HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET); // LED on (active low) HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_SET); // LED off HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); // Toggle // Читать состояние входа GPIO_PinState btn = HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0); if (btn == GPIO_PIN_RESET) { // Кнопка нажата (pull-up, нажатие — к GND) HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET); } GPIO режимы:GPIO_MODE_OUTPUT_PP — Push-Pull выход (стандартный) GPIO_MODE_OUTPUT_OD — Open-Drain (для I2C, совместимость 5В) GPIO_MODE_INPUT — Вход GPIO_MODE_IT_RISING/FALLING/RISING_FALLING — Вход с прерыванием GPIO_MODE_AF_PP — Альтернативная функция (UART, SPI, Timer...) GPIO_MODE_ANALOG — Аналоговый режим (для ADC/DAC) UART: последовательная связь// Инициализация UART1 на PA9(TX)/PA10(RX), 115200 бод static void MX_USART1_UART_Init(void) { huart1.Instance = USART1; huart1.Init.BaudRate = 115200; huart1.Init.WordLength = UART_WORDLENGTH_8B; huart1.Init.StopBits = UART_STOPBITS_1; huart1.Init.Parity = UART_PARITY_NONE; huart1.Init.Mode = UART_MODE_TX_RX; huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart1.Init.OverSampling = UART_OVERSAMPLING_16; HAL_UART_Init(&huart1); } // Отправка данных (блокирующий режим) char msg[] = "Hello STM32!\r\n"; HAL_UART_Transmit(&huart1, (uint8_t*)msg, strlen(msg), 100); // timeout 100ms // Приём (с таймаутом) uint8_t rx_buf[64]; uint16_t bytes_received; HAL_StatusTypeDef status = HAL_UART_Receive(&huart1, rx_buf, 64, 1000); // printf через UART (настройка retarget) // В файле syscalls.c добавить: int __io_putchar(int ch) { HAL_UART_Transmit(&huart1, (uint8_t*)&ch, 1, 100); return ch; } // После этого можно использовать printf! printf("Температура: %.2f°C\r\n", temperature); Приём через прерывания (правильный подход):// Буфер приёма и флаги #define RX_BUFFER_SIZE 256 static uint8_t rx_buffer[RX_BUFFER_SIZE]; static uint8_t rx_byte; // Один байт для приёма по прерыванию static uint16_t rx_index = 0; static volatile uint8_t line_ready = 0; // Запускаем прием одного байта в прерывании // (вызвать после инициализации и после каждого приёма) void UART_StartReceive(void) { HAL_UART_Receive_IT(&huart1, &rx_byte, 1); } // Callback — вызывается автоматически при приёме байта void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { if (huart->Instance == USART1) { if (rx_byte == '\n' || rx_index >= RX_BUFFER_SIZE - 1) { rx_buffer[rx_index] = '\0'; rx_index = 0; line_ready = 1; // Сигнализируем что строка готова } else if (rx_byte != '\r') { rx_buffer[rx_index++] = rx_byte; } // Запускаем следующий приём HAL_UART_Receive_IT(&huart1, &rx_byte, 1); } } // В главном цикле: if (line_ready) { line_ready = 0; printf("Получено: %s\r\n", rx_buffer); process_command((char*)rx_buffer); } Таймеры: ШИМ и точное времяТаймеры STM32 — мощнейшая периферия. Используются для ШИМ, измерения частоты, генерации прерываний, управления сервоприводами. ШИМ (PWM) для управления яркостью/скоростью:// TIM3, Channel 1, PA6, частота 1 кГц // Настройка через CubeMX, затем в коде: // Запуск ШИМ HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1); // Изменение скважности (0–999 для ARR=999) // 500 = 50% скважности __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, 500); // Плавное изменение яркости LED for (int i = 0; i <= 999; i++) { __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, i); HAL_Delay(1); } for (int i = 999; i >= 0; i--) { __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, i); HAL_Delay(1); } Управление сервоприводом (50 Гц, 1–2 мс):// TIM2, 50 Гц (период 20 мс = 20000 тиков при предделителе 72-1) // ARR = 19999, PSC = 71 → 1 тик = 1 мкс #define SERVO_MIN_US 1000 // 1 мс = левый предел #define SERVO_MAX_US 2000 // 2 мс = правый предел #define SERVO_MID_US 1500 // 1.5 мс = центр void servo_set_angle(int angle_degrees) // 0–180 градусов { // Линейное масштабирование угла → ширина импульса uint32_t pulse = SERVO_MIN_US + (uint32_t)(angle_degrees * (SERVO_MAX_US - SERVO_MIN_US) / 180); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, pulse); } // Использование: servo_set_angle(0); // Левый предел HAL_Delay(1000); servo_set_angle(90); // Центр HAL_Delay(1000); servo_set_angle(180); // Правый предел Прерывание по таймеру (точный период):// Прерывание каждые 1 мс от TIM6 (базовый таймер) // Запуск: HAL_TIM_Base_Start_IT(&htim6); // Callback: void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { if (htim->Instance == TIM6) { system_tick_ms++; // Собственный миллисекундный счётчик // Задачи каждые 10 мс if (system_tick_ms % 10 == 0) { adc_trigger_conversion(); } // Задачи каждые 1000 мс if (system_tick_ms % 1000 == 0) { led_heartbeat_toggle(); } } } АЦП: чтение аналоговых сигналов// Одиночное преобразование (блокирующий режим) uint32_t adc_read_single(void) { HAL_ADC_Start(&hadc1); HAL_ADC_PollForConversion(&hadc1, 10); // Ждём не более 10 мс uint32_t value = HAL_ADC_GetValue(&hadc1); HAL_ADC_Stop(&hadc1); return value; // 0–4095 для 12-бит АЦП } // Перевод в напряжение (опорное 3.3В): float adc_to_voltage(uint32_t raw) { return raw * 3.3f / 4095.0f; } // Перевод в температуру для NTC-термистора (10кОм, B=3950): float ntc_to_celsius(uint32_t raw_adc) { float voltage = adc_to_voltage(raw_adc); float resistance = 10000.0f * voltage / (3.3f - voltage); // Делитель с 10кОм // Уравнение Стейнхарта-Харта (упрощённое) float steinhart; steinhart = resistance / 10000.0f; // R/Rnom steinhart = logf(steinhart); // ln(R/Rnom) steinhart /= 3950.0f; // / B steinhart += 1.0f / (25.0f + 273.15f); // + 1/T0 steinhart = 1.0f / steinhart; // Инверсия return steinhart - 273.15f; // Кельвин → Цельсий } АЦП с DMA (несколько каналов, без участия CPU):// Настройка: ADC + DMA, Continuous mode, 4 канала (PA0-PA3) #define ADC_CHANNELS 4 static uint16_t adc_dma_buffer[ADC_CHANNELS]; // Запуск: HAL_ADC_Start_DMA(&hadc1, (uint32_t*)adc_dma_buffer, ADC_CHANNELS); // DMA автоматически обновляет буфер! // В основном цикле просто читаем: float temp = ntc_to_celsius(adc_dma_buffer[0]); float pressure = adc_dma_buffer[1] * 3.3f / 4095.0f; // Callback при завершении преобразований всех каналов: void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc) { // Все 4 канала обновлены adc_data_ready = 1; } I2C: подключение датчиков// Пример: датчик давления/температуры BMP280 #define BMP280_ADDR 0x76 << 1 // 7-бит адрес, сдвиг влево для HAL // Читать регистр uint8_t BMP280_ReadReg(uint8_t reg) { uint8_t value; HAL_I2C_Mem_Read(&hi2c1, BMP280_ADDR, // Адрес устройства reg, // Адрес регистра I2C_MEMADD_SIZE_8BIT, &value, // Буфер 1, // Количество байт 100); // Таймаут return value; } // Записать регистр void BMP280_WriteReg(uint8_t reg, uint8_t value) { HAL_I2C_Mem_Write(&hi2c1, BMP280_ADDR, reg, I2C_MEMADD_SIZE_8BIT, &value, 1, 100); } // Читать несколько байт подряд void BMP280_ReadBurst(uint8_t reg, uint8_t *buf, uint8_t len) { HAL_I2C_Mem_Read(&hi2c1, BMP280_ADDR, reg, I2C_MEMADD_SIZE_8BIT, buf, len, 100); } // Инициализация BMP280 void BMP280_Init(void) { // Проверка ID (должен быть 0x60) uint8_t id = BMP280_ReadReg(0xD0); if (id != 0x60) { printf("BMP280 не найден! ID=0x%02X\r\n", id); return; } // Нормальный режим, oversampling ×4 для давления и температуры BMP280_WriteReg(0xF4, 0x97); // ctrl_meas: осsp×4, osst×4, normal mode BMP280_WriteReg(0xF5, 0xA0); // config: t_sb=1000мс, filter=16 } // Чтение данных (упрощённо, без компенсации) typedef struct { float temperature; float pressure; } BMP280_Data; BMP280_Data BMP280_ReadData(void) { uint8_t raw[6]; BMP280_ReadBurst(0xF7, raw, 6); // press_msb, press_lsb, press_xlsb, temp×3 int32_t raw_press = ((int32_t)raw[0] << 12) | ((int32_t)raw[1] << 4) | (raw[2] >> 4); int32_t raw_temp = ((int32_t)raw[3] << 12) | ((int32_t)raw[4] << 4) | (raw[5] >> 4); // Реальный код должен использовать калибровочные коэффициенты из регистров! // Это упрощение для иллюстрации BMP280_Data data; data.temperature = raw_temp / 5120.0f; // Очень грубо! data.pressure = raw_press / 25600.0f; // Очень грубо! return data; } SPI: быстрая связь с периферией// SPI — быстрее I2C, до 45 МГц на STM32F4 // Пример: дисплей ST7735 (128×160 пикселей) // CS-пин вручную (NSS в software-режиме) #define LCD_CS_LOW() HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET) #define LCD_CS_HIGH() HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET) #define LCD_DC_LOW() HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET) // Command #define LCD_DC_HIGH() HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_SET) // Data void LCD_SendCommand(uint8_t cmd) { LCD_DC_LOW(); LCD_CS_LOW(); HAL_SPI_Transmit(&hspi1, &cmd, 1, 100); LCD_CS_HIGH(); } void LCD_SendData(uint8_t *data, uint16_t len) { LCD_DC_HIGH(); LCD_CS_LOW(); HAL_SPI_Transmit(&hspi1, data, len, 1000); LCD_CS_HIGH(); } // Быстрая передача через DMA (не блокирует CPU) void LCD_SendDataDMA(uint8_t *data, uint16_t len) { LCD_DC_HIGH(); LCD_CS_LOW(); HAL_SPI_Transmit_DMA(&hspi1, data, len); // CS поднимется в callback после завершения DMA } void HAL_SPI_TxCpltCallback(SPI_HandleTypeDef *hspi) { if (hspi->Instance == SPI1) { LCD_CS_HIGH(); dma_complete = 1; } } Структура хорошего проекта на STM32project/ ├── Core/ │ ├── Inc/ │ │ ├── main.h │ │ └── stm32f1xx_hal_conf.h │ └── Src/ │ ├── main.c — Только инициализация + main loop │ ├── stm32f1xx_it.c — Обработчики прерываний │ └── syscalls.c — printf retarget ├── Drivers/ │ ├── CMSIS/ — ARM заголовки, системный файл │ └── STM32F1xx_HAL_Driver/ — HAL библиотека (не трогать) ├── App/ — ВАШ КОД здесь! │ ├── sensors/ │ │ ├── bmp280.c / .h │ │ └── ntc.c / .h │ ├── control/ │ │ ├── pid.c / .h │ │ └── state_machine.c / .h │ ├── comm/ │ │ ├── modbus_slave.c / .h │ │ └── protocol.c / .h │ └── app.c — Главная логика приложения └── CMakeLists.txt / .ioc — Конфигурация проекта Принцип: main.c содержит только вызов App_Init() и App_Run(). Вся логика — в директории App/. Типичные ошибки и как их избежать1. Забыли включить тактирование периферии // Без этого HAL_GPIO_Init ничего не сделает! __HAL_RCC_GPIOA_CLK_ENABLE(); __HAL_RCC_USART1_CLK_ENABLE(); __HAL_RCC_SPI1_CLK_ENABLE(); // CubeMX делает это автоматически — используйте его для инициализации 2. Неправильные Alternate Functions STM32F1 имеет фиксированный маппинг пинов. STM32F4+ — гибкий (GPIO_AF1_..., GPIO_AF7_...). Смотрите datasheet, раздел "Alternate function mapping". 3. Блокирующие задержки в прерываниях // НЕЛЬЗЯ! HAL_Delay использует SysTick-прерывание низшего приоритета void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { HAL_Delay(100); // Зависнет если прерывание выше приоритета SysTick! } 4. Запись в HAL-переменную напрямую Не изменяйте поля структур huart1, htim2 вручную в рантайме — используйте API функции. 5. Stack Overflow STM32F103 имеет только 20 КБ RAM. Большие массивы на стеке — прямой путь к Hard Fault. Объявляйте большие буферы как глобальные или статические. Отладка: когда всё идёт не такHard Fault Handler — ваш лучший другvoid HardFault_Handler(void) { // Получаем регистры состояния __asm volatile("TST lr, #4\n" "ITE EQ\n" "MRSEQ r0, MSP\n" "MRSNE r0, PSP\n" "B HardFault_HandlerC"); } void HardFault_HandlerC(uint32_t *stack_frame) { printf("=== HARD FAULT ===\r\n"); printf("PC = 0x%08lX\r\n", stack_frame[6]); // Адрес проблемной инструкции printf("LR = 0x%08lX\r\n", stack_frame[5]); printf("CFSR= 0x%08lX\r\n", SCB->CFSR); // Причина fault while(1); } SWO (Serial Wire Output) — printf без UARTЕсли UART занят, используйте SWO для отладочного вывода. В STM32CubeIDE включается за 5 кликов, вывод идёт в консоль IDE без дополнительного кабеля. ЗаключениеSTM32 — это настоящий профессиональный инструмент. Первые шаги сложнее чем с Arduino: нужно настроить тактирование, разобраться с HAL, понять концепцию прерываний и DMA. Но это окупается многократно: производительность, периферия, потребление, цена в серийном производстве. Рекомендуемый путь: STM32F103 Blue Pill + ST-Link V2 + STM32CubeIDE. Первый проект — мигание LED через прерывание таймера. Второй — чтение кнопки с антидребезгом. Третий — датчик по I2C с выводом в UART. К четвёртому проекту вы уже будете чувствовать себя уверенно. Документация ST: datasheet, Reference Manual, Programming Manual — читайте их. Они написаны хорошо и содержат ответы на все вопросы.
Почему STM32, а не продолжать на ArduinoArduino — отличный старт. Но в какой-то момент вы упираетесь в потолок: скорость 16 МГц не хватает, Flash/RAM заканчивается, нужны возможности которых у AVR нет — несколько UART, USB Device, Ethernet MAC, криптоускоритель, DSP-инструкции. STM32 — это семейство 32-битных микроконтроллеров от STMicroelectronics на базе ядер ARM Cortex-M. Характеристики даже бюджетного STM32F103C8T6 ("Blue Pill"): Параметр Arduino Uno (ATmega328P) STM32F103C8T6 Ядро AVR 8-бит ARM Cortex-M3 32-бит Тактовая частота 16 МГц 72 МГц Flash 32 КБ 64 КБ RAM 2 КБ 20 КБ GPIO 23 37 ADC 6 × 10-бит 10 × 12-бит Таймеры 3 7 SPI / I2C / UART 1 / 1 / 1 2 / 2 / 3 USB Нет Full-Speed USB 2.0 Цена ~$3–5 (оригинал) ~$0.8–2 И это самый простой STM32. Линейки F4, F7, H7 — ещё на порядок мощнее. Семейства STM32: как не запутатьсяSTM32 делится на несколько линеек по ядру и позиционированию: STM32F0/F1/F3 — Базовые (Cortex-M0/M3/M4) F103: самый популярный, "Blue Pill", 72 МГц — идеален для старта F303: F3 с матфлоатом и операционными усилителями внутри F030/F042: ультрадешёвые, от $0.3, для массового производства STM32F4 — Производительные (Cortex-M4F с FPU) F401/F411: 84–100 МГц, USB, хороший баланс F407/F429: 168 МГц, Ethernet MAC, FMC для внешней SDRAM, камеры Популярны для DSP-задач, аудио, обработки изображений STM32F7/H7 — Высокопроизводительные (Cortex-M7) H743: 480 МГц, двойная точность float, L1-кэш, умереть не встать Используются в промышленных системах реального времени STM32L — Низкое энергопотребление (Low Power) L051/L071: ток в sleep < 1 мкА, для батарейных устройств STM32G/U — Новые серии (2019–2022) G431/G474: отличные для силовой электроники (Timer1 с мёртвым временем) U5: Cortex-M33 с TrustZone, IoT-безопасность Рекомендации для старта: STM32F103C8T6 (Blue Pill) или STM32G031 для новых проектов. Настройка среды разработкиSTM32CubeIDE + STM32CubeMXSTM32CubeIDE — официальная бесплатная среда от ST. Включает: Eclipse-based IDE Компилятор GCC ARM OpenOCD для программирования/отладки Встроенный STM32CubeMX для генерации кода инициализации Установка: Скачать STM32CubeIDE с сайта st.com (требует регистрации, бесплатно) Установить, выбрать пакеты для нужных семейств Подключить программатор ST-Link V2 ($3–5 на AliExpress) Первое подключение (Blue Pill → ST-Link V2):ST-Link V2 Blue Pill SWDIO → PA13 SWCLK → PA14 GND → GND 3.3V → 3V3 Важно: На оригинальных Blue Pill загрузчик прошит неправильно. Для работы с ST-Link через SWD это не проблема — программируем напрямую в flash. HAL vs LL: что выбратьSTMicroelectronics предоставляет два уровня библиотек: HAL (Hardware Abstraction Layer): Высокоуровневый, максимально переносимый код Автоматически генерируется CubeMX Проще в использовании, больше overhead Рекомендуется для большинства проектов LL (Low Layer): Тонкие обёртки над регистрами, почти без overhead Максимальная производительность и предсказуемость Нужно хорошее знание периферии Для критичного по времени кода Смешанный подход (лучший для опытных): HAL для инициализации (CubeMX генерирует) LL для критичных по времени операций в прерываниях GPIO: мигаем светодиодом правильноCubeMX генерирует такой код инициализации GPIO: // Автосгенерированный код CubeMX static void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct = {0}; __HAL_RCC_GPIOC_CLK_ENABLE(); // Включаем тактирование порта C // Настройка PC13 как выход (встроенный LED на Blue Pill) GPIO_InitStruct.Pin = GPIO_PIN_13; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // Push-Pull выход GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; // 2 МГц, достаточно для LED HAL_GPIO_Init(GPIOC, &GPIO_InitStruct); // Входной сигнал на PA0 (кнопка) GPIO_InitStruct.Pin = GPIO_PIN_0; GPIO_InitStruct.Mode = GPIO_MODE_INPUT; GPIO_InitStruct.Pull = GPIO_PULLUP; // Внутренний pull-up HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); } Управление GPIO в программе: // Включить / выключить / переключить HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET); // LED on (active low) HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_SET); // LED off HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); // Toggle // Читать состояние входа GPIO_PinState btn = HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0); if (btn == GPIO_PIN_RESET) { // Кнопка нажата (pull-up, нажатие — к GND) HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET); } GPIO режимы:GPIO_MODE_OUTPUT_PP — Push-Pull выход (стандартный) GPIO_MODE_OUTPUT_OD — Open-Drain (для I2C, совместимость 5В) GPIO_MODE_INPUT — Вход GPIO_MODE_IT_RISING/FALLING/RISING_FALLING — Вход с прерыванием GPIO_MODE_AF_PP — Альтернативная функция (UART, SPI, Timer...) GPIO_MODE_ANALOG — Аналоговый режим (для ADC/DAC) UART: последовательная связь// Инициализация UART1 на PA9(TX)/PA10(RX), 115200 бод static void MX_USART1_UART_Init(void) { huart1.Instance = USART1; huart1.Init.BaudRate = 115200; huart1.Init.WordLength = UART_WORDLENGTH_8B; huart1.Init.StopBits = UART_STOPBITS_1; huart1.Init.Parity = UART_PARITY_NONE; huart1.Init.Mode = UART_MODE_TX_RX; huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart1.Init.OverSampling = UART_OVERSAMPLING_16; HAL_UART_Init(&huart1); } // Отправка данных (блокирующий режим) char msg[] = "Hello STM32!\r\n"; HAL_UART_Transmit(&huart1, (uint8_t*)msg, strlen(msg), 100); // timeout 100ms // Приём (с таймаутом) uint8_t rx_buf[64]; uint16_t bytes_received; HAL_StatusTypeDef status = HAL_UART_Receive(&huart1, rx_buf, 64, 1000); // printf через UART (настройка retarget) // В файле syscalls.c добавить: int __io_putchar(int ch) { HAL_UART_Transmit(&huart1, (uint8_t*)&ch, 1, 100); return ch; } // После этого можно использовать printf! printf("Температура: %.2f°C\r\n", temperature); Приём через прерывания (правильный подход):// Буфер приёма и флаги #define RX_BUFFER_SIZE 256 static uint8_t rx_buffer[RX_BUFFER_SIZE]; static uint8_t rx_byte; // Один байт для приёма по прерыванию static uint16_t rx_index = 0; static volatile uint8_t line_ready = 0; // Запускаем прием одного байта в прерывании // (вызвать после инициализации и после каждого приёма) void UART_StartReceive(void) { HAL_UART_Receive_IT(&huart1, &rx_byte, 1); } // Callback — вызывается автоматически при приёме байта void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { if (huart->Instance == USART1) { if (rx_byte == '\n' || rx_index >= RX_BUFFER_SIZE - 1) { rx_buffer[rx_index] = '\0'; rx_index = 0; line_ready = 1; // Сигнализируем что строка готова } else if (rx_byte != '\r') { rx_buffer[rx_index++] = rx_byte; } // Запускаем следующий приём HAL_UART_Receive_IT(&huart1, &rx_byte, 1); } } // В главном цикле: if (line_ready) { line_ready = 0; printf("Получено: %s\r\n", rx_buffer); process_command((char*)rx_buffer); } Таймеры: ШИМ и точное времяТаймеры STM32 — мощнейшая периферия. Используются для ШИМ, измерения частоты, генерации прерываний, управления сервоприводами. ШИМ (PWM) для управления яркостью/скоростью:// TIM3, Channel 1, PA6, частота 1 кГц // Настройка через CubeMX, затем в коде: // Запуск ШИМ HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1); // Изменение скважности (0–999 для ARR=999) // 500 = 50% скважности __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, 500); // Плавное изменение яркости LED for (int i = 0; i <= 999; i++) { __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, i); HAL_Delay(1); } for (int i = 999; i >= 0; i--) { __HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, i); HAL_Delay(1); } Управление сервоприводом (50 Гц, 1–2 мс):// TIM2, 50 Гц (период 20 мс = 20000 тиков при предделителе 72-1) // ARR = 19999, PSC = 71 → 1 тик = 1 мкс #define SERVO_MIN_US 1000 // 1 мс = левый предел #define SERVO_MAX_US 2000 // 2 мс = правый предел #define SERVO_MID_US 1500 // 1.5 мс = центр void servo_set_angle(int angle_degrees) // 0–180 градусов { // Линейное масштабирование угла → ширина импульса uint32_t pulse = SERVO_MIN_US + (uint32_t)(angle_degrees * (SERVO_MAX_US - SERVO_MIN_US) / 180); __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, pulse); } // Использование: servo_set_angle(0); // Левый предел HAL_Delay(1000); servo_set_angle(90); // Центр HAL_Delay(1000); servo_set_angle(180); // Правый предел Прерывание по таймеру (точный период):// Прерывание каждые 1 мс от TIM6 (базовый таймер) // Запуск: HAL_TIM_Base_Start_IT(&htim6); // Callback: void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { if (htim->Instance == TIM6) { system_tick_ms++; // Собственный миллисекундный счётчик // Задачи каждые 10 мс if (system_tick_ms % 10 == 0) { adc_trigger_conversion(); } // Задачи каждые 1000 мс if (system_tick_ms % 1000 == 0) { led_heartbeat_toggle(); } } } АЦП: чтение аналоговых сигналов// Одиночное преобразование (блокирующий режим) uint32_t adc_read_single(void) { HAL_ADC_Start(&hadc1); HAL_ADC_PollForConversion(&hadc1, 10); // Ждём не более 10 мс uint32_t value = HAL_ADC_GetValue(&hadc1); HAL_ADC_Stop(&hadc1); return value; // 0–4095 для 12-бит АЦП } // Перевод в напряжение (опорное 3.3В): float adc_to_voltage(uint32_t raw) { return raw * 3.3f / 4095.0f; } // Перевод в температуру для NTC-термистора (10кОм, B=3950): float ntc_to_celsius(uint32_t raw_adc) { float voltage = adc_to_voltage(raw_adc); float resistance = 10000.0f * voltage / (3.3f - voltage); // Делитель с 10кОм // Уравнение Стейнхарта-Харта (упрощённое) float steinhart; steinhart = resistance / 10000.0f; // R/Rnom steinhart = logf(steinhart); // ln(R/Rnom) steinhart /= 3950.0f; // / B steinhart += 1.0f / (25.0f + 273.15f); // + 1/T0 steinhart = 1.0f / steinhart; // Инверсия return steinhart - 273.15f; // Кельвин → Цельсий } АЦП с DMA (несколько каналов, без участия CPU):// Настройка: ADC + DMA, Continuous mode, 4 канала (PA0-PA3) #define ADC_CHANNELS 4 static uint16_t adc_dma_buffer[ADC_CHANNELS]; // Запуск: HAL_ADC_Start_DMA(&hadc1, (uint32_t*)adc_dma_buffer, ADC_CHANNELS); // DMA автоматически обновляет буфер! // В основном цикле просто читаем: float temp = ntc_to_celsius(adc_dma_buffer[0]); float pressure = adc_dma_buffer[1] * 3.3f / 4095.0f; // Callback при завершении преобразований всех каналов: void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc) { // Все 4 канала обновлены adc_data_ready = 1; } I2C: подключение датчиков// Пример: датчик давления/температуры BMP280 #define BMP280_ADDR 0x76 << 1 // 7-бит адрес, сдвиг влево для HAL // Читать регистр uint8_t BMP280_ReadReg(uint8_t reg) { uint8_t value; HAL_I2C_Mem_Read(&hi2c1, BMP280_ADDR, // Адрес устройства reg, // Адрес регистра I2C_MEMADD_SIZE_8BIT, &value, // Буфер 1, // Количество байт 100); // Таймаут return value; } // Записать регистр void BMP280_WriteReg(uint8_t reg, uint8_t value) { HAL_I2C_Mem_Write(&hi2c1, BMP280_ADDR, reg, I2C_MEMADD_SIZE_8BIT, &value, 1, 100); } // Читать несколько байт подряд void BMP280_ReadBurst(uint8_t reg, uint8_t *buf, uint8_t len) { HAL_I2C_Mem_Read(&hi2c1, BMP280_ADDR, reg, I2C_MEMADD_SIZE_8BIT, buf, len, 100); } // Инициализация BMP280 void BMP280_Init(void) { // Проверка ID (должен быть 0x60) uint8_t id = BMP280_ReadReg(0xD0); if (id != 0x60) { printf("BMP280 не найден! ID=0x%02X\r\n", id); return; } // Нормальный режим, oversampling ×4 для давления и температуры BMP280_WriteReg(0xF4, 0x97); // ctrl_meas: осsp×4, osst×4, normal mode BMP280_WriteReg(0xF5, 0xA0); // config: t_sb=1000мс, filter=16 } // Чтение данных (упрощённо, без компенсации) typedef struct { float temperature; float pressure; } BMP280_Data; BMP280_Data BMP280_ReadData(void) { uint8_t raw[6]; BMP280_ReadBurst(0xF7, raw, 6); // press_msb, press_lsb, press_xlsb, temp×3 int32_t raw_press = ((int32_t)raw[0] << 12) | ((int32_t)raw[1] << 4) | (raw[2] >> 4); int32_t raw_temp = ((int32_t)raw[3] << 12) | ((int32_t)raw[4] << 4) | (raw[5] >> 4); // Реальный код должен использовать калибровочные коэффициенты из регистров! // Это упрощение для иллюстрации BMP280_Data data; data.temperature = raw_temp / 5120.0f; // Очень грубо! data.pressure = raw_press / 25600.0f; // Очень грубо! return data; } SPI: быстрая связь с периферией// SPI — быстрее I2C, до 45 МГц на STM32F4 // Пример: дисплей ST7735 (128×160 пикселей) // CS-пин вручную (NSS в software-режиме) #define LCD_CS_LOW() HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET) #define LCD_CS_HIGH() HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET) #define LCD_DC_LOW() HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET) // Command #define LCD_DC_HIGH() HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_SET) // Data void LCD_SendCommand(uint8_t cmd) { LCD_DC_LOW(); LCD_CS_LOW(); HAL_SPI_Transmit(&hspi1, &cmd, 1, 100); LCD_CS_HIGH(); } void LCD_SendData(uint8_t *data, uint16_t len) { LCD_DC_HIGH(); LCD_CS_LOW(); HAL_SPI_Transmit(&hspi1, data, len, 1000); LCD_CS_HIGH(); } // Быстрая передача через DMA (не блокирует CPU) void LCD_SendDataDMA(uint8_t *data, uint16_t len) { LCD_DC_HIGH(); LCD_CS_LOW(); HAL_SPI_Transmit_DMA(&hspi1, data, len); // CS поднимется в callback после завершения DMA } void HAL_SPI_TxCpltCallback(SPI_HandleTypeDef *hspi) { if (hspi->Instance == SPI1) { LCD_CS_HIGH(); dma_complete = 1; } } Структура хорошего проекта на STM32project/ ├── Core/ │ ├── Inc/ │ │ ├── main.h │ │ └── stm32f1xx_hal_conf.h │ └── Src/ │ ├── main.c — Только инициализация + main loop │ ├── stm32f1xx_it.c — Обработчики прерываний │ └── syscalls.c — printf retarget ├── Drivers/ │ ├── CMSIS/ — ARM заголовки, системный файл │ └── STM32F1xx_HAL_Driver/ — HAL библиотека (не трогать) ├── App/ — ВАШ КОД здесь! │ ├── sensors/ │ │ ├── bmp280.c / .h │ │ └── ntc.c / .h │ ├── control/ │ │ ├── pid.c / .h │ │ └── state_machine.c / .h │ ├── comm/ │ │ ├── modbus_slave.c / .h │ │ └── protocol.c / .h │ └── app.c — Главная логика приложения └── CMakeLists.txt / .ioc — Конфигурация проекта Принцип: main.c содержит только вызов App_Init() и App_Run(). Вся логика — в директории App/. Типичные ошибки и как их избежать1. Забыли включить тактирование периферии // Без этого HAL_GPIO_Init ничего не сделает! __HAL_RCC_GPIOA_CLK_ENABLE(); __HAL_RCC_USART1_CLK_ENABLE(); __HAL_RCC_SPI1_CLK_ENABLE(); // CubeMX делает это автоматически — используйте его для инициализации 2. Неправильные Alternate Functions STM32F1 имеет фиксированный маппинг пинов. STM32F4+ — гибкий (GPIO_AF1_..., GPIO_AF7_...). Смотрите datasheet, раздел "Alternate function mapping". 3. Блокирующие задержки в прерываниях // НЕЛЬЗЯ! HAL_Delay использует SysTick-прерывание низшего приоритета void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { HAL_Delay(100); // Зависнет если прерывание выше приоритета SysTick! } 4. Запись в HAL-переменную напрямую Не изменяйте поля структур huart1, htim2 вручную в рантайме — используйте API функции. 5. Stack Overflow STM32F103 имеет только 20 КБ RAM. Большие массивы на стеке — прямой путь к Hard Fault. Объявляйте большие буферы как глобальные или статические. Отладка: когда всё идёт не такHard Fault Handler — ваш лучший другvoid HardFault_Handler(void) { // Получаем регистры состояния __asm volatile("TST lr, #4\n" "ITE EQ\n" "MRSEQ r0, MSP\n" "MRSNE r0, PSP\n" "B HardFault_HandlerC"); } void HardFault_HandlerC(uint32_t *stack_frame) { printf("=== HARD FAULT ===\r\n"); printf("PC = 0x%08lX\r\n", stack_frame[6]); // Адрес проблемной инструкции printf("LR = 0x%08lX\r\n", stack_frame[5]); printf("CFSR= 0x%08lX\r\n", SCB->CFSR); // Причина fault while(1); } SWO (Serial Wire Output) — printf без UARTЕсли UART занят, используйте SWO для отладочного вывода. В STM32CubeIDE включается за 5 кликов, вывод идёт в консоль IDE без дополнительного кабеля. ЗаключениеSTM32 — это настоящий профессиональный инструмент. Первые шаги сложнее чем с Arduino: нужно настроить тактирование, разобраться с HAL, понять концепцию прерываний и DMA. Но это окупается многократно: производительность, периферия, потребление, цена в серийном производстве. Рекомендуемый путь: STM32F103 Blue Pill + ST-Link V2 + STM32CubeIDE. Первый проект — мигание LED через прерывание таймера. Второй — чтение кнопки с антидребезгом. Третий — датчик по I2C с выводом в UART. К четвёртому проекту вы уже будете чувствовать себя уверенно. Документация ST: datasheet, Reference Manual, Programming Manual — читайте их. Они написаны хорошо и содержат ответы на все вопросы. -
 Почему Modbus жив и актуален спустя 45 летModbus был разработан компанией Modicon в 1979 году для связи ПЛК по последовательной шине. Прошло почти полвека — а протокол по-прежнему является самым распространённым в промышленной автоматизации. По различным оценкам, более 30 миллионов устройств в мире используют Modbus. Секрет долголетия прост: протокол исключительно прост в понимании и реализации. Он работает по схеме "мастер-слейв", имеет открытую спецификацию, не требует лицензирования, поддерживается абсолютно всеми промышленными устройствами. Сегодня существуют три основные реализации: Modbus RTU — по последовательной шине (RS-232, RS-485) Modbus ASCII — текстовое представление, устарело Modbus TCP — поверх TCP/IP Ethernet Архитектура: мастер и слейвыModbus — строго мастер-слейв (Master-Slave) протокол: Мастер (Master): Инициирует все запросы. Только один мастер в сети. Обычно это ПЛК, SCADA-сервер, промышленный компьютер. Слейв (Slave): Отвечает на запросы мастера. В сети RS-485 может быть до 247 слейвов с адресами 1–247. Адрес 0 — широковещательный (слейвы не отвечают). Важно: Слейв никогда не инициирует передачу! Он только отвечает. Мастер Слейв 1 Слейв 2 Слейв 3 | | | | |── Request → Addr=1 ─────>| | | |<── Response ────────────| | | | | | | |── Request → Addr=2 ──────────────>| | |<── Response ──────────────────────| | Типы данных (регистры)Modbus оперирует четырьмя типами данных: 1. Coils (Coil Status) — Дискретные выходыРазмер: 1 бит Доступ: Чтение и запись мастером Функциональные коды: FC01 (читать), FC05 (записать один), FC15 (записать несколько) Адреса: 00001–09999 (в Modbus-нотации), 0x0000–0xFFFF (в PDU) Применение: Состояния реле, клапанов, двигателей 2. Discrete Inputs (Input Status) — Дискретные входыРазмер: 1 бит Доступ: Только чтение мастером (данные поступают от физических входов) Функциональные коды: FC02 (читать) Адреса: 10001–19999 Применение: Состояния кнопок, датчиков, концевиков 3. Holding Registers — Регистры храненияРазмер: 16 бит (2 байта), беззнаковое целое 0–65535 Доступ: Чтение и запись мастером Функциональные коды: FC03 (читать), FC06 (записать один), FC16 (записать несколько) Адреса: 40001–49999 Применение: Уставки, параметры настройки, команды управления 4. Input Registers — Входные регистрыРазмер: 16 бит Доступ: Только чтение мастером Функциональные коды: FC04 (читать) Адреса: 30001–39999 Применение: Измеренные значения датчиков, счётчики Хранение чисел с плавающей точкой16 бит для float недостаточно. Для передачи float используют два последовательных регистра (32 бит = IEEE 754): Регистр 40001 (HIGH word): первые 16 бит float Регистр 40002 (LOW word): вторые 16 бит float Значение 3.14159: IEEE 754: 0x40490FDB HIGH: 0x4049 LOW: 0x0FDB Важная ловушка: порядок байт и слов (endianness) различается у разных производителей! Четыре варианта: Big-Endian, Little-Endian, Big-Endian Byte Swap, Little-Endian Byte Swap. Смотрите документацию устройства. Modbus RTU: структура фреймаRTU (Remote Terminal Unit) — бинарный формат, максимально компактный. ┌─────────┬──────────────┬──────┬────────────────────┬───────┐ │ Address │ Function Code│ Data │ Data │ CRC │ │ 1 байт │ 1 байт │ ... │ ... │ 2 байт│ └─────────┴──────────────┴──────┴────────────────────┴───────┘ Пример запроса FC03 (читать Holding Registers): Запрос: "Слейв №1, дай мне 2 регистра начиная с адреса 0x0064 (100)" 01 03 00 64 00 02 85 D5 01 — Адрес слейва 03 — Код функции (читать Holding Registers) 00 64 — Начальный адрес (0x0064 = 100) 00 02 — Количество регистров (2) 85 D5 — CRC16 (контрольная сумма) Ответ слейва: 01 03 04 01 F4 00 0A 2B 11 01 — Адрес слейва 03 — Код функции 04 — Количество байт данных (2 регистра × 2 байта = 4) 01 F4 — Значение регистра 100 (0x01F4 = 500) 00 0A — Значение регистра 101 (0x000A = 10) 2B 11 — CRC16 Ответ при ошибке (Exception Response): 01 83 02 C0 F1 01 — Адрес слейва 83 — Код функции + 0x80 (признак ошибки) 02 — Код исключения (02 = Illegal Data Address) C0 F1 — CRC16 Коды исключений:Код Название Описание 01 Illegal Function Устройство не поддерживает данный FC 02 Illegal Data Address Запрошенный адрес не существует 03 Illegal Data Value Недопустимое значение данных 04 Server Device Failure Внутренняя ошибка устройства 06 Server Device Busy Устройство занято, повторите позже Расчёт CRC16CRC16 (Cyclic Redundancy Check) — контрольная сумма для обнаружения ошибок передачи. Алгоритм несложный, но важный: uint16_t ModbusCRC16(uint8_t *buffer, uint16_t length) { uint16_t crc = 0xFFFF; for (uint16_t i = 0; i < length; i++) { crc ^= (uint16_t)buffer[i]; for (uint8_t j = 0; j < 8; j++) { if (crc & 0x0001) { crc >>= 1; crc ^= 0xA001; // Полином Modbus } else { crc >>= 1; } } } return crc; // Младший байт первый в фрейме! } // Использование: uint8_t frame[] = {0x01, 0x03, 0x00, 0x64, 0x00, 0x02}; uint16_t crc = ModbusCRC16(frame, 6); // Добавить в конец фрейма: (crc & 0xFF), (crc >> 8) Важно: В Modbus RTU CRC передаётся младшим байтом вперёд (Little-Endian)! RS-485: физический уровеньModbus RTU работает поверх RS-485 — дифференциальной последовательной шины. Параметры сети:Длина: до 1200 м (при скорости 9600 бод), до 100 м (при 115200 бод) Устройств: до 32 без репитеров, до 247 с репитерами Скорости: 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200 бод Линия: витая пара, лучше экранированная (STP) Терминаторы: 120 Ом на каждом конце шины Топология — только шина!Мастер ──────┬──────────┬──────────┬──────── Терминатор 120Ом 120Ом ───┘ Слейв1 Слейв2 Слейв3 НЕЛЬЗЯ делать "звезду" — отражения сигнала разрушат связь. Типичные проблемы RS-485:Проблема 1: Нет терминирующих резисторов Симптомы: связь работает на малой скорости, не работает на высокой. Или работает с одним устройством, не работает с несколькими. Решение: 120 Ом строго на двух концах шины — и только там. Проблема 2: Земля не подключена RS-485 — дифференциальный сигнал (A-B), не требует общего провода теоретически. Практически — без общей земли при большой разнице потенциалов (грозозащита, разные здания) трансиверы сгорают. Третий провод "GND" обязателен. Проблема 3: Смешаны A и B Сигнальные линии перепутаны местами. Ошибка типичная при ручном монтаже. Симптом: нет ответа вообще или постоянные ошибки CRC. Проблема 4: Нет pull-up/pull-down резисторов на линии Когда все устройства молчат (пауза между транзакциями), линия "висит в воздухе". Нужны подтягивающие резисторы: A через ~560 Ом на +5В, B через ~560 Ом на GND. Многие USB-RS485 адаптеры имеют их встроенными. Modbus TCP: Ethernet-версияModbus TCP — это Modbus RTU без адреса устройства и без CRC, завёрнутый в TCP/IP пакет. Структура Modbus TCP фрейма:┌─────────────┬──────────────────────────────────────────────┐ │ MBAP Header (7 байт) │ PDU (Protocol Data Unit) │ ├──────┬───────┬──────────┬───────┬──────────────────────────┤ │TrID │ Proto │ Length │ UnitID│ FC │ Data │ │2 байт│ 2 байт│ 2 байта │ 1 байт│1 байт│ N байт │ └──────┴───────┴──────────┴───────┴──────┴──────────────────┘ TrID — Transaction Identifier (любое число, повторяется в ответе) Proto — 0x0000 (всегда) Length — длина оставшейся части (Unit ID + FC + Data) UnitID — адрес устройства (для RTU-TCP шлюзов) Порт: 502 (стандартный, зарезервирован IANA) TCP обеспечивает надёжную доставку — CRC не нужен. Но помните: TCP не обеспечивает реальное время. Задержки могут варьироваться от единиц миллисекунд до нескольких секунд при перегрузке сети. Практика: Modbus на PythonБиблиотека pymodbus (полноценная реализация)# Установка: pip install pymodbus from pymodbus.client import ModbusTcpClient, ModbusSerialClient import struct import time # ========== MODBUS TCP ========== def read_vfd_status_tcp(host: str, port: int = 502, unit_id: int = 1) -> dict: """ Читаем параметры частотника по Modbus TCP. Пример для ABB ACS550. """ client = ModbusTcpClient(host=host, port=port, timeout=3) if not client.connect(): raise ConnectionError(f"Не удалось подключиться к {host}:{port}") try: # Читаем Input Registers 30001-30006 (адрес 0-5) result = client.read_input_registers( address=0, # Начальный адрес (0 = регистр 30001) count=6, # Количество регистров slave=unit_id ) if result.isError(): raise Exception(f"Ошибка Modbus: {result}") regs = result.registers return { 'status_word': regs[0], # Слово состояния 'speed_rpm': regs[1], # Скорость об/мин 'frequency_hz': regs[2] / 100.0, # Частота (0.01 Гц) 'current_a': regs[3] / 10.0, # Ток (0.1 А) 'voltage_v': regs[4], # Напряжение 'power_kw': regs[5] / 10.0, # Мощность (0.1 кВт) 'running': bool(regs[0] & 0x0001), 'fault': bool(regs[0] & 0x0008), } finally: client.close() def write_vfd_command_tcp(host: str, freq_hz: float, run: bool, unit_id: int = 1): """Управление частотником через Modbus TCP""" client = ModbusTcpClient(host=host, port=502, timeout=3) if not client.connect(): raise ConnectionError(f"Не удалось подключиться") try: # Задаём частоту (Holding Register 40002, адрес 1) freq_raw = int(freq_hz * 100) # 50.00 Гц → 5000 client.write_register(address=1, value=freq_raw, slave=unit_id) # Команда пуск/стоп (Holding Register 40001, адрес 0) control_word = 0x0002 if run else 0x0001 # 2=Run, 1=Stop client.write_register(address=0, value=control_word, slave=unit_id) print(f"VFD: {'Пуск' if run else 'Стоп'}, частота {freq_hz} Гц") finally: client.close() # ========== MODBUS RTU ========== def create_rtu_client(port: str, baudrate: int = 9600) -> ModbusSerialClient: """Создаём RTU клиент для RS-485""" return ModbusSerialClient( port=port, # '/dev/ttyUSB0' или 'COM3' baudrate=baudrate, bytesize=8, parity='N', # N=None, E=Even, O=Odd stopbits=1, timeout=1.0 ) def scan_modbus_rtu_network(port: str, baudrate: int = 9600) -> list: """ Сканирование Modbus RTU сети — ищем все активные устройства. Возвращает список адресов ответивших устройств. """ client = create_rtu_client(port, baudrate) client.connect() found_devices = [] print(f"Сканирование Modbus RTU на {port}, {baudrate} бод...") for address in range(1, 248): try: # Пробуем прочитать 1 регистр — если устройство есть, оно ответит result = client.read_holding_registers(0, 1, slave=address) if not result.isError(): found_devices.append(address) print(f" ✅ Найдено устройство: адрес {address}") except Exception: pass # Таймаут — устройства нет time.sleep(0.05) # Пауза между запросами client.close() print(f"Найдено устройств: {len(found_devices)}") return found_devices # ========== РАБОТА С FLOAT ========== def registers_to_float(high_reg: int, low_reg: int, byte_order: str = 'big') -> float: """ Конвертация двух Modbus-регистров в float IEEE 754. byte_order: 'big' (ABCD), 'little' (DCBA), 'big_swap' (BADC), 'little_swap' (CDAB) """ if byte_order == 'big': raw = struct.pack('>HH', high_reg, low_reg) elif byte_order == 'little': raw = struct.pack('<HH', low_reg, high_reg) elif byte_order == 'big_swap': raw = struct.pack('>HH', ((high_reg & 0xFF) << 8) | (high_reg >> 8), ((low_reg & 0xFF) << 8) | (low_reg >> 8)) else: raw = struct.pack('>HH', high_reg, low_reg) return struct.unpack('>f', raw)[0] def float_to_registers(value: float, byte_order: str = 'big') -> tuple: """Конвертация float в два Modbus-регистра""" raw = struct.pack('>f', value) high_reg, low_reg = struct.unpack('>HH', raw) if byte_order == 'big': return high_reg, low_reg elif byte_order == 'little': return low_reg, high_reg return high_reg, low_reg # ========== ПРИМЕР OPROS SCADA ========== class ModbusDataCollector: """ Циклический опрос Modbus-устройств для SCADA/мониторинга. """ def __init__(self, host: str): self.client = ModbusTcpClient(host=host, port=502, timeout=5) self.data = {} def poll_all_devices(self) -> dict: """Опросить все устройства и вернуть данные""" if not self.client.connect(): return {'error': 'connection_failed'} try: results = {} # Насос 1 (Unit ID = 1) pump1 = self.client.read_input_registers(0, 4, slave=1) if not pump1.isError(): r = pump1.registers results['pump1'] = { 'running': bool(r[0] & 1), 'fault': bool(r[0] & 8), 'freq_hz': r[1] / 100.0, 'current_a': r[2] / 10.0, 'power_kw': r[3] / 10.0, } # Датчик давления (Unit ID = 5, счётчик давления) pressure = self.client.read_input_registers(0, 2, slave=5) if not pressure.isError(): r = pressure.registers results['pressure_bar'] = registers_to_float(r[0], r[1]) # Расходомер (Unit ID = 6) flow = self.client.read_input_registers(0, 4, slave=6) if not flow.isError(): r = flow.registers results['flow'] = { 'instant_m3h': registers_to_float(r[0], r[1]), 'total_m3': registers_to_float(r[2], r[3]), } return results finally: self.client.close() # ========== ЗАПУСК ========== if __name__ == "__main__": # Пример использования collector = ModbusDataCollector('192.168.1.100') while True: data = collector.poll_all_devices() print(f"Давление: {data.get('pressure_bar', 0):.2f} бар") print(f"Насос 1: {'Работает' if data.get('pump1', {}).get('running') else 'Стоит'}, " f"{data.get('pump1', {}).get('freq_hz', 0):.1f} Гц") time.sleep(1) Реализация Modbus Slave на микроконтроллере (C)Иногда нужно сделать собственное устройство с Modbus-интерфейсом. Вот минимальная реализация для STM32/Arduino: #include <stdint.h> #include <string.h> #define MODBUS_ADDRESS 1 // Адрес нашего устройства #define HOLDING_REG_COUNT 20 // Количество Holding Registers #define INPUT_REG_COUNT 10 // Количество Input Registers // Данные регистров static uint16_t holding_regs[HOLDING_REG_COUNT] = {0}; static uint16_t input_regs[INPUT_REG_COUNT] = {0}; // Расчёт CRC16 static uint16_t crc16(uint8_t *buf, uint16_t len) { uint16_t crc = 0xFFFF; for (uint16_t i = 0; i < len; i++) { crc ^= buf[i]; for (uint8_t j = 0; j < 8; j++) { if (crc & 1) { crc = (crc >> 1) ^ 0xA001; } else { crc >>= 1; } } } return crc; } // Отправка ответа (реализуйте под вашу платформу) extern void uart_send(uint8_t *data, uint16_t len); // Обработка Modbus запроса void modbus_process_request(uint8_t *request, uint16_t req_len) { uint8_t response[256]; uint16_t resp_len = 0; // Проверяем адрес if (request[0] != MODBUS_ADDRESS) return; // Проверяем CRC uint16_t received_crc = (request[req_len-1] << 8) | request[req_len-2]; uint16_t calculated_crc = crc16(request, req_len - 2); if (received_crc != calculated_crc) return; // CRC ошибка — игнорируем uint8_t fc = request[1]; uint16_t addr = (request[2] << 8) | request[3]; uint16_t count = (request[4] << 8) | request[5]; response[resp_len++] = MODBUS_ADDRESS; response[resp_len++] = fc; switch (fc) { case 0x03: // Читать Holding Registers { if (addr + count > HOLDING_REG_COUNT) { // Исключение: неверный адрес response[1] = fc | 0x80; response[resp_len++] = 0x02; break; } response[resp_len++] = count * 2; // Количество байт for (uint16_t i = 0; i < count; i++) { response[resp_len++] = holding_regs[addr + i] >> 8; response[resp_len++] = holding_regs[addr + i] & 0xFF; } break; } case 0x04: // Читать Input Registers { if (addr + count > INPUT_REG_COUNT) { response[1] = fc | 0x80; response[resp_len++] = 0x02; break; } response[resp_len++] = count * 2; for (uint16_t i = 0; i < count; i++) { response[resp_len++] = input_regs[addr + i] >> 8; response[resp_len++] = input_regs[addr + i] & 0xFF; } break; } case 0x06: // Записать один Holding Register { if (addr >= HOLDING_REG_COUNT) { response[1] = fc | 0x80; response[resp_len++] = 0x02; break; } holding_regs[addr] = (request[4] << 8) | request[5]; // Эхо запроса как ответ memcpy(response + 2, request + 2, 4); resp_len += 4; break; } case 0x10: // Записать несколько Holding Registers { if (addr + count > HOLDING_REG_COUNT) { response[1] = fc | 0x80; response[resp_len++] = 0x02; break; } uint8_t byte_count = request[6]; for (uint16_t i = 0; i < count; i++) { holding_regs[addr + i] = (request[7 + i*2] << 8) | request[8 + i*2]; } // Ответ: адрес и количество записанных регистров response[resp_len++] = request[2]; response[resp_len++] = request[3]; response[resp_len++] = request[4]; response[resp_len++] = request[5]; break; } default: { // Неизвестная функция response[1] = fc | 0x80; response[resp_len++] = 0x01; // Illegal Function break; } } // Добавляем CRC uint16_t resp_crc = crc16(response, resp_len); response[resp_len++] = resp_crc & 0xFF; response[resp_len++] = resp_crc >> 8; // Отправляем ответ uart_send(response, resp_len); } // Обновление Input Registers из реальных данных void modbus_update_inputs(uint16_t temp_x10, uint16_t pressure_x100, uint16_t status_bits) { input_regs[0] = temp_x10; // Температура × 10 (250 = 25.0°C) input_regs[1] = pressure_x100; // Давление × 100 (1013 = 10.13 бар) input_regs[2] = status_bits; // Биты состояния } Диагностика сети Modbus: практические инструментыWireshark для Modbus TCPWireshark понимает Modbus TCP "из коробки". Фильтр для захвата: modbus.func_code — фильтр по функциональному коду tcp.port == 502 — весь Modbus TCP трафик modbus.exception_code — только ошибки ModRSsim2 / Diagslave — эмуляторы слейваНезаменимы при разработке — тестируете мастер без реального оборудования. Свой анализатор на Python:import socket import struct def modbus_tcp_sniffer(host: str, port: int = 502): """Простой анализатор Modbus TCP запросов""" FC_NAMES = { 1: 'Read Coils', 2: 'Read Discrete Inputs', 3: 'Read Holding Registers', 4: 'Read Input Registers', 5: 'Write Single Coil', 6: 'Write Single Register', 15: 'Write Multiple Coils', 16: 'Write Multiple Registers', } sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM) sock.connect((host, port)) while True: # Читаем MBAP-заголовок (7 байт) header = sock.recv(7) if len(header) < 7: break transaction_id = struct.unpack('>H', header[0:2])[0] protocol_id = struct.unpack('>H', header[2:4])[0] length = struct.unpack('>H', header[4:6])[0] unit_id = header[6] # Читаем PDU pdu = sock.recv(length - 1) fc = pdu[0] fc_name = FC_NAMES.get(fc, f'Unknown FC {fc}') if fc < 0x80: # Запрос или нормальный ответ if len(pdu) >= 5: addr = struct.unpack('>H', pdu[1:3])[0] count = struct.unpack('>H', pdu[3:5])[0] print(f"[{transaction_id}] Unit={unit_id} | {fc_name} | " f"Addr={addr} Count={count}") else: # Ошибка exc_code = pdu[1] print(f"[{transaction_id}] EXCEPTION: FC={fc & 0x7F} Code={exc_code}") Типичные проблемы и решения"Устройство не отвечает"Алгоритм диагностики: Проверьте физику: контакты, полярность A/B, терминаторы Проверьте параметры порта: baudrate, parity, stopbits — должны совпадать с устройством Проверьте адрес — он правильно задан в устройстве? Не все устройства имеют адрес "1" по умолчанию Используйте осциллограф или логический анализатор — видны ли данные на линии? Попробуйте другой кабель "Иногда не отвечает, CRC-ошибки"Слишком длинная линия без репитера Отсутствуют или не там стоят терминаторы Несколько устройств с одинаковым адресом Помехи от силового оборудования — проложите кабель отдельно "Данные неверные"Неправильный порядок байт (endianness) для float Смещение адреса: в документации адреса часто указываются с 1 (40001), а в запросе нужно с 0 (0x0000) Неправильный масштабный коэффициент (×10, ×100, ×0.01...) ЗаключениеModbus — это фундамент промышленной коммуникации. Несмотря на почтенный возраст, он остаётся стандартом де-факто и будет таковым ещё долгие годы. Понимание структуры фрейма, типов данных и физического уровня RS-485 — это базовый навык любого инженера автоматики. Для новых проектов, где нет ограничений совместимости, стоит рассматривать OPC UA или MQTT как более современные альтернативы. Но если перед вами стоит задача интегрировать любое промышленное оборудование — с вероятностью 90% оно имеет Modbus, и знание этого протокола решит задачу быстро и надёжно.
Почему Modbus жив и актуален спустя 45 летModbus был разработан компанией Modicon в 1979 году для связи ПЛК по последовательной шине. Прошло почти полвека — а протокол по-прежнему является самым распространённым в промышленной автоматизации. По различным оценкам, более 30 миллионов устройств в мире используют Modbus. Секрет долголетия прост: протокол исключительно прост в понимании и реализации. Он работает по схеме "мастер-слейв", имеет открытую спецификацию, не требует лицензирования, поддерживается абсолютно всеми промышленными устройствами. Сегодня существуют три основные реализации: Modbus RTU — по последовательной шине (RS-232, RS-485) Modbus ASCII — текстовое представление, устарело Modbus TCP — поверх TCP/IP Ethernet Архитектура: мастер и слейвыModbus — строго мастер-слейв (Master-Slave) протокол: Мастер (Master): Инициирует все запросы. Только один мастер в сети. Обычно это ПЛК, SCADA-сервер, промышленный компьютер. Слейв (Slave): Отвечает на запросы мастера. В сети RS-485 может быть до 247 слейвов с адресами 1–247. Адрес 0 — широковещательный (слейвы не отвечают). Важно: Слейв никогда не инициирует передачу! Он только отвечает. Мастер Слейв 1 Слейв 2 Слейв 3 | | | | |── Request → Addr=1 ─────>| | | |<── Response ────────────| | | | | | | |── Request → Addr=2 ──────────────>| | |<── Response ──────────────────────| | Типы данных (регистры)Modbus оперирует четырьмя типами данных: 1. Coils (Coil Status) — Дискретные выходыРазмер: 1 бит Доступ: Чтение и запись мастером Функциональные коды: FC01 (читать), FC05 (записать один), FC15 (записать несколько) Адреса: 00001–09999 (в Modbus-нотации), 0x0000–0xFFFF (в PDU) Применение: Состояния реле, клапанов, двигателей 2. Discrete Inputs (Input Status) — Дискретные входыРазмер: 1 бит Доступ: Только чтение мастером (данные поступают от физических входов) Функциональные коды: FC02 (читать) Адреса: 10001–19999 Применение: Состояния кнопок, датчиков, концевиков 3. Holding Registers — Регистры храненияРазмер: 16 бит (2 байта), беззнаковое целое 0–65535 Доступ: Чтение и запись мастером Функциональные коды: FC03 (читать), FC06 (записать один), FC16 (записать несколько) Адреса: 40001–49999 Применение: Уставки, параметры настройки, команды управления 4. Input Registers — Входные регистрыРазмер: 16 бит Доступ: Только чтение мастером Функциональные коды: FC04 (читать) Адреса: 30001–39999 Применение: Измеренные значения датчиков, счётчики Хранение чисел с плавающей точкой16 бит для float недостаточно. Для передачи float используют два последовательных регистра (32 бит = IEEE 754): Регистр 40001 (HIGH word): первые 16 бит float Регистр 40002 (LOW word): вторые 16 бит float Значение 3.14159: IEEE 754: 0x40490FDB HIGH: 0x4049 LOW: 0x0FDB Важная ловушка: порядок байт и слов (endianness) различается у разных производителей! Четыре варианта: Big-Endian, Little-Endian, Big-Endian Byte Swap, Little-Endian Byte Swap. Смотрите документацию устройства. Modbus RTU: структура фреймаRTU (Remote Terminal Unit) — бинарный формат, максимально компактный. ┌─────────┬──────────────┬──────┬────────────────────┬───────┐ │ Address │ Function Code│ Data │ Data │ CRC │ │ 1 байт │ 1 байт │ ... │ ... │ 2 байт│ └─────────┴──────────────┴──────┴────────────────────┴───────┘ Пример запроса FC03 (читать Holding Registers): Запрос: "Слейв №1, дай мне 2 регистра начиная с адреса 0x0064 (100)" 01 03 00 64 00 02 85 D5 01 — Адрес слейва 03 — Код функции (читать Holding Registers) 00 64 — Начальный адрес (0x0064 = 100) 00 02 — Количество регистров (2) 85 D5 — CRC16 (контрольная сумма) Ответ слейва: 01 03 04 01 F4 00 0A 2B 11 01 — Адрес слейва 03 — Код функции 04 — Количество байт данных (2 регистра × 2 байта = 4) 01 F4 — Значение регистра 100 (0x01F4 = 500) 00 0A — Значение регистра 101 (0x000A = 10) 2B 11 — CRC16 Ответ при ошибке (Exception Response): 01 83 02 C0 F1 01 — Адрес слейва 83 — Код функции + 0x80 (признак ошибки) 02 — Код исключения (02 = Illegal Data Address) C0 F1 — CRC16 Коды исключений:Код Название Описание 01 Illegal Function Устройство не поддерживает данный FC 02 Illegal Data Address Запрошенный адрес не существует 03 Illegal Data Value Недопустимое значение данных 04 Server Device Failure Внутренняя ошибка устройства 06 Server Device Busy Устройство занято, повторите позже Расчёт CRC16CRC16 (Cyclic Redundancy Check) — контрольная сумма для обнаружения ошибок передачи. Алгоритм несложный, но важный: uint16_t ModbusCRC16(uint8_t *buffer, uint16_t length) { uint16_t crc = 0xFFFF; for (uint16_t i = 0; i < length; i++) { crc ^= (uint16_t)buffer[i]; for (uint8_t j = 0; j < 8; j++) { if (crc & 0x0001) { crc >>= 1; crc ^= 0xA001; // Полином Modbus } else { crc >>= 1; } } } return crc; // Младший байт первый в фрейме! } // Использование: uint8_t frame[] = {0x01, 0x03, 0x00, 0x64, 0x00, 0x02}; uint16_t crc = ModbusCRC16(frame, 6); // Добавить в конец фрейма: (crc & 0xFF), (crc >> 8) Важно: В Modbus RTU CRC передаётся младшим байтом вперёд (Little-Endian)! RS-485: физический уровеньModbus RTU работает поверх RS-485 — дифференциальной последовательной шины. Параметры сети:Длина: до 1200 м (при скорости 9600 бод), до 100 м (при 115200 бод) Устройств: до 32 без репитеров, до 247 с репитерами Скорости: 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200 бод Линия: витая пара, лучше экранированная (STP) Терминаторы: 120 Ом на каждом конце шины Топология — только шина!Мастер ──────┬──────────┬──────────┬──────── Терминатор 120Ом 120Ом ───┘ Слейв1 Слейв2 Слейв3 НЕЛЬЗЯ делать "звезду" — отражения сигнала разрушат связь. Типичные проблемы RS-485:Проблема 1: Нет терминирующих резисторов Симптомы: связь работает на малой скорости, не работает на высокой. Или работает с одним устройством, не работает с несколькими. Решение: 120 Ом строго на двух концах шины — и только там. Проблема 2: Земля не подключена RS-485 — дифференциальный сигнал (A-B), не требует общего провода теоретически. Практически — без общей земли при большой разнице потенциалов (грозозащита, разные здания) трансиверы сгорают. Третий провод "GND" обязателен. Проблема 3: Смешаны A и B Сигнальные линии перепутаны местами. Ошибка типичная при ручном монтаже. Симптом: нет ответа вообще или постоянные ошибки CRC. Проблема 4: Нет pull-up/pull-down резисторов на линии Когда все устройства молчат (пауза между транзакциями), линия "висит в воздухе". Нужны подтягивающие резисторы: A через ~560 Ом на +5В, B через ~560 Ом на GND. Многие USB-RS485 адаптеры имеют их встроенными. Modbus TCP: Ethernet-версияModbus TCP — это Modbus RTU без адреса устройства и без CRC, завёрнутый в TCP/IP пакет. Структура Modbus TCP фрейма:┌─────────────┬──────────────────────────────────────────────┐ │ MBAP Header (7 байт) │ PDU (Protocol Data Unit) │ ├──────┬───────┬──────────┬───────┬──────────────────────────┤ │TrID │ Proto │ Length │ UnitID│ FC │ Data │ │2 байт│ 2 байт│ 2 байта │ 1 байт│1 байт│ N байт │ └──────┴───────┴──────────┴───────┴──────┴──────────────────┘ TrID — Transaction Identifier (любое число, повторяется в ответе) Proto — 0x0000 (всегда) Length — длина оставшейся части (Unit ID + FC + Data) UnitID — адрес устройства (для RTU-TCP шлюзов) Порт: 502 (стандартный, зарезервирован IANA) TCP обеспечивает надёжную доставку — CRC не нужен. Но помните: TCP не обеспечивает реальное время. Задержки могут варьироваться от единиц миллисекунд до нескольких секунд при перегрузке сети. Практика: Modbus на PythonБиблиотека pymodbus (полноценная реализация)# Установка: pip install pymodbus from pymodbus.client import ModbusTcpClient, ModbusSerialClient import struct import time # ========== MODBUS TCP ========== def read_vfd_status_tcp(host: str, port: int = 502, unit_id: int = 1) -> dict: """ Читаем параметры частотника по Modbus TCP. Пример для ABB ACS550. """ client = ModbusTcpClient(host=host, port=port, timeout=3) if not client.connect(): raise ConnectionError(f"Не удалось подключиться к {host}:{port}") try: # Читаем Input Registers 30001-30006 (адрес 0-5) result = client.read_input_registers( address=0, # Начальный адрес (0 = регистр 30001) count=6, # Количество регистров slave=unit_id ) if result.isError(): raise Exception(f"Ошибка Modbus: {result}") regs = result.registers return { 'status_word': regs[0], # Слово состояния 'speed_rpm': regs[1], # Скорость об/мин 'frequency_hz': regs[2] / 100.0, # Частота (0.01 Гц) 'current_a': regs[3] / 10.0, # Ток (0.1 А) 'voltage_v': regs[4], # Напряжение 'power_kw': regs[5] / 10.0, # Мощность (0.1 кВт) 'running': bool(regs[0] & 0x0001), 'fault': bool(regs[0] & 0x0008), } finally: client.close() def write_vfd_command_tcp(host: str, freq_hz: float, run: bool, unit_id: int = 1): """Управление частотником через Modbus TCP""" client = ModbusTcpClient(host=host, port=502, timeout=3) if not client.connect(): raise ConnectionError(f"Не удалось подключиться") try: # Задаём частоту (Holding Register 40002, адрес 1) freq_raw = int(freq_hz * 100) # 50.00 Гц → 5000 client.write_register(address=1, value=freq_raw, slave=unit_id) # Команда пуск/стоп (Holding Register 40001, адрес 0) control_word = 0x0002 if run else 0x0001 # 2=Run, 1=Stop client.write_register(address=0, value=control_word, slave=unit_id) print(f"VFD: {'Пуск' if run else 'Стоп'}, частота {freq_hz} Гц") finally: client.close() # ========== MODBUS RTU ========== def create_rtu_client(port: str, baudrate: int = 9600) -> ModbusSerialClient: """Создаём RTU клиент для RS-485""" return ModbusSerialClient( port=port, # '/dev/ttyUSB0' или 'COM3' baudrate=baudrate, bytesize=8, parity='N', # N=None, E=Even, O=Odd stopbits=1, timeout=1.0 ) def scan_modbus_rtu_network(port: str, baudrate: int = 9600) -> list: """ Сканирование Modbus RTU сети — ищем все активные устройства. Возвращает список адресов ответивших устройств. """ client = create_rtu_client(port, baudrate) client.connect() found_devices = [] print(f"Сканирование Modbus RTU на {port}, {baudrate} бод...") for address in range(1, 248): try: # Пробуем прочитать 1 регистр — если устройство есть, оно ответит result = client.read_holding_registers(0, 1, slave=address) if not result.isError(): found_devices.append(address) print(f" ✅ Найдено устройство: адрес {address}") except Exception: pass # Таймаут — устройства нет time.sleep(0.05) # Пауза между запросами client.close() print(f"Найдено устройств: {len(found_devices)}") return found_devices # ========== РАБОТА С FLOAT ========== def registers_to_float(high_reg: int, low_reg: int, byte_order: str = 'big') -> float: """ Конвертация двух Modbus-регистров в float IEEE 754. byte_order: 'big' (ABCD), 'little' (DCBA), 'big_swap' (BADC), 'little_swap' (CDAB) """ if byte_order == 'big': raw = struct.pack('>HH', high_reg, low_reg) elif byte_order == 'little': raw = struct.pack('<HH', low_reg, high_reg) elif byte_order == 'big_swap': raw = struct.pack('>HH', ((high_reg & 0xFF) << 8) | (high_reg >> 8), ((low_reg & 0xFF) << 8) | (low_reg >> 8)) else: raw = struct.pack('>HH', high_reg, low_reg) return struct.unpack('>f', raw)[0] def float_to_registers(value: float, byte_order: str = 'big') -> tuple: """Конвертация float в два Modbus-регистра""" raw = struct.pack('>f', value) high_reg, low_reg = struct.unpack('>HH', raw) if byte_order == 'big': return high_reg, low_reg elif byte_order == 'little': return low_reg, high_reg return high_reg, low_reg # ========== ПРИМЕР OPROS SCADA ========== class ModbusDataCollector: """ Циклический опрос Modbus-устройств для SCADA/мониторинга. """ def __init__(self, host: str): self.client = ModbusTcpClient(host=host, port=502, timeout=5) self.data = {} def poll_all_devices(self) -> dict: """Опросить все устройства и вернуть данные""" if not self.client.connect(): return {'error': 'connection_failed'} try: results = {} # Насос 1 (Unit ID = 1) pump1 = self.client.read_input_registers(0, 4, slave=1) if not pump1.isError(): r = pump1.registers results['pump1'] = { 'running': bool(r[0] & 1), 'fault': bool(r[0] & 8), 'freq_hz': r[1] / 100.0, 'current_a': r[2] / 10.0, 'power_kw': r[3] / 10.0, } # Датчик давления (Unit ID = 5, счётчик давления) pressure = self.client.read_input_registers(0, 2, slave=5) if not pressure.isError(): r = pressure.registers results['pressure_bar'] = registers_to_float(r[0], r[1]) # Расходомер (Unit ID = 6) flow = self.client.read_input_registers(0, 4, slave=6) if not flow.isError(): r = flow.registers results['flow'] = { 'instant_m3h': registers_to_float(r[0], r[1]), 'total_m3': registers_to_float(r[2], r[3]), } return results finally: self.client.close() # ========== ЗАПУСК ========== if __name__ == "__main__": # Пример использования collector = ModbusDataCollector('192.168.1.100') while True: data = collector.poll_all_devices() print(f"Давление: {data.get('pressure_bar', 0):.2f} бар") print(f"Насос 1: {'Работает' if data.get('pump1', {}).get('running') else 'Стоит'}, " f"{data.get('pump1', {}).get('freq_hz', 0):.1f} Гц") time.sleep(1) Реализация Modbus Slave на микроконтроллере (C)Иногда нужно сделать собственное устройство с Modbus-интерфейсом. Вот минимальная реализация для STM32/Arduino: #include <stdint.h> #include <string.h> #define MODBUS_ADDRESS 1 // Адрес нашего устройства #define HOLDING_REG_COUNT 20 // Количество Holding Registers #define INPUT_REG_COUNT 10 // Количество Input Registers // Данные регистров static uint16_t holding_regs[HOLDING_REG_COUNT] = {0}; static uint16_t input_regs[INPUT_REG_COUNT] = {0}; // Расчёт CRC16 static uint16_t crc16(uint8_t *buf, uint16_t len) { uint16_t crc = 0xFFFF; for (uint16_t i = 0; i < len; i++) { crc ^= buf[i]; for (uint8_t j = 0; j < 8; j++) { if (crc & 1) { crc = (crc >> 1) ^ 0xA001; } else { crc >>= 1; } } } return crc; } // Отправка ответа (реализуйте под вашу платформу) extern void uart_send(uint8_t *data, uint16_t len); // Обработка Modbus запроса void modbus_process_request(uint8_t *request, uint16_t req_len) { uint8_t response[256]; uint16_t resp_len = 0; // Проверяем адрес if (request[0] != MODBUS_ADDRESS) return; // Проверяем CRC uint16_t received_crc = (request[req_len-1] << 8) | request[req_len-2]; uint16_t calculated_crc = crc16(request, req_len - 2); if (received_crc != calculated_crc) return; // CRC ошибка — игнорируем uint8_t fc = request[1]; uint16_t addr = (request[2] << 8) | request[3]; uint16_t count = (request[4] << 8) | request[5]; response[resp_len++] = MODBUS_ADDRESS; response[resp_len++] = fc; switch (fc) { case 0x03: // Читать Holding Registers { if (addr + count > HOLDING_REG_COUNT) { // Исключение: неверный адрес response[1] = fc | 0x80; response[resp_len++] = 0x02; break; } response[resp_len++] = count * 2; // Количество байт for (uint16_t i = 0; i < count; i++) { response[resp_len++] = holding_regs[addr + i] >> 8; response[resp_len++] = holding_regs[addr + i] & 0xFF; } break; } case 0x04: // Читать Input Registers { if (addr + count > INPUT_REG_COUNT) { response[1] = fc | 0x80; response[resp_len++] = 0x02; break; } response[resp_len++] = count * 2; for (uint16_t i = 0; i < count; i++) { response[resp_len++] = input_regs[addr + i] >> 8; response[resp_len++] = input_regs[addr + i] & 0xFF; } break; } case 0x06: // Записать один Holding Register { if (addr >= HOLDING_REG_COUNT) { response[1] = fc | 0x80; response[resp_len++] = 0x02; break; } holding_regs[addr] = (request[4] << 8) | request[5]; // Эхо запроса как ответ memcpy(response + 2, request + 2, 4); resp_len += 4; break; } case 0x10: // Записать несколько Holding Registers { if (addr + count > HOLDING_REG_COUNT) { response[1] = fc | 0x80; response[resp_len++] = 0x02; break; } uint8_t byte_count = request[6]; for (uint16_t i = 0; i < count; i++) { holding_regs[addr + i] = (request[7 + i*2] << 8) | request[8 + i*2]; } // Ответ: адрес и количество записанных регистров response[resp_len++] = request[2]; response[resp_len++] = request[3]; response[resp_len++] = request[4]; response[resp_len++] = request[5]; break; } default: { // Неизвестная функция response[1] = fc | 0x80; response[resp_len++] = 0x01; // Illegal Function break; } } // Добавляем CRC uint16_t resp_crc = crc16(response, resp_len); response[resp_len++] = resp_crc & 0xFF; response[resp_len++] = resp_crc >> 8; // Отправляем ответ uart_send(response, resp_len); } // Обновление Input Registers из реальных данных void modbus_update_inputs(uint16_t temp_x10, uint16_t pressure_x100, uint16_t status_bits) { input_regs[0] = temp_x10; // Температура × 10 (250 = 25.0°C) input_regs[1] = pressure_x100; // Давление × 100 (1013 = 10.13 бар) input_regs[2] = status_bits; // Биты состояния } Диагностика сети Modbus: практические инструментыWireshark для Modbus TCPWireshark понимает Modbus TCP "из коробки". Фильтр для захвата: modbus.func_code — фильтр по функциональному коду tcp.port == 502 — весь Modbus TCP трафик modbus.exception_code — только ошибки ModRSsim2 / Diagslave — эмуляторы слейваНезаменимы при разработке — тестируете мастер без реального оборудования. Свой анализатор на Python:import socket import struct def modbus_tcp_sniffer(host: str, port: int = 502): """Простой анализатор Modbus TCP запросов""" FC_NAMES = { 1: 'Read Coils', 2: 'Read Discrete Inputs', 3: 'Read Holding Registers', 4: 'Read Input Registers', 5: 'Write Single Coil', 6: 'Write Single Register', 15: 'Write Multiple Coils', 16: 'Write Multiple Registers', } sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM) sock.connect((host, port)) while True: # Читаем MBAP-заголовок (7 байт) header = sock.recv(7) if len(header) < 7: break transaction_id = struct.unpack('>H', header[0:2])[0] protocol_id = struct.unpack('>H', header[2:4])[0] length = struct.unpack('>H', header[4:6])[0] unit_id = header[6] # Читаем PDU pdu = sock.recv(length - 1) fc = pdu[0] fc_name = FC_NAMES.get(fc, f'Unknown FC {fc}') if fc < 0x80: # Запрос или нормальный ответ if len(pdu) >= 5: addr = struct.unpack('>H', pdu[1:3])[0] count = struct.unpack('>H', pdu[3:5])[0] print(f"[{transaction_id}] Unit={unit_id} | {fc_name} | " f"Addr={addr} Count={count}") else: # Ошибка exc_code = pdu[1] print(f"[{transaction_id}] EXCEPTION: FC={fc & 0x7F} Code={exc_code}") Типичные проблемы и решения"Устройство не отвечает"Алгоритм диагностики: Проверьте физику: контакты, полярность A/B, терминаторы Проверьте параметры порта: baudrate, parity, stopbits — должны совпадать с устройством Проверьте адрес — он правильно задан в устройстве? Не все устройства имеют адрес "1" по умолчанию Используйте осциллограф или логический анализатор — видны ли данные на линии? Попробуйте другой кабель "Иногда не отвечает, CRC-ошибки"Слишком длинная линия без репитера Отсутствуют или не там стоят терминаторы Несколько устройств с одинаковым адресом Помехи от силового оборудования — проложите кабель отдельно "Данные неверные"Неправильный порядок байт (endianness) для float Смещение адреса: в документации адреса часто указываются с 1 (40001), а в запросе нужно с 0 (0x0000) Неправильный масштабный коэффициент (×10, ×100, ×0.01...) ЗаключениеModbus — это фундамент промышленной коммуникации. Несмотря на почтенный возраст, он остаётся стандартом де-факто и будет таковым ещё долгие годы. Понимание структуры фрейма, типов данных и физического уровня RS-485 — это базовый навык любого инженера автоматики. Для новых проектов, где нет ограничений совместимости, стоит рассматривать OPC UA или MQTT как более современные альтернативы. Но если перед вами стоит задача интегрировать любое промышленное оборудование — с вероятностью 90% оно имеет Modbus, и знание этого протокола решит задачу быстро и надёжно. -
 Что такое ПЛК и почему это не просто "мощный Arduino"ПЛК (Программируемый Логический Контроллер) — это специализированный промышленный компьютер, разработанный для управления технологическими процессами в реальном времени. Главное отличие от обычного компьютера или Arduino — детерминизм: гарантированное время реакции на входные сигналы, независимо от загрузки процессора. Когда на производстве нужно, чтобы насос включился строго через 50 мс после срабатывания датчика — это ПЛК. Когда допустима задержка в секунду — можно обойтись более дешёвыми решениями. Когда вопрос в надёжности и работе в условиях вибраций, пыли, температур от -40 до +70°C — снова ПЛК. Другие ключевые отличия: Цикличность: программа выполняется повторяющимися циклами (обычно 1–100 мс). Каждый цикл: считать все входы → выполнить программу → записать все выходы Гальваническая развязка входов/выходов: промышленные сигналы (24В DC, 220В AC) изолированы от внутренней логики Горячая замена модулей: во многих системах можно менять I/O-модули без остановки контроллера Встроенная диагностика: ПЛК сам следит за собственным здоровьем Архитектура ПЛК: как это устроеноЦентральный процессорный модуль (CPU)Выполняет программу, управляет обменом данных, содержит основную память. В S7-1200 CPU также имеет встроенные входы/выходы, Ethernet порт и возможность расширения. Модули ввода-вывода (I/O Modules)Дискретные входы (DI): Воспринимают сигналы "есть напряжение / нет напряжения". Обычно 24В DC или 220В AC. Примеры источников: кнопки, концевые выключатели, датчики приближения (индуктивные, ёмкостные), фотодатчики, реле. Дискретные выходы (DO): Управляют исполнительными устройствами. Бывают транзисторные (24В DC, быстрые) и релейные (любое напряжение до 250В AC, медленные, но универсальные). Аналоговые входы (AI): Принимают непрерывные сигналы: 4–20мА, 0–10В, термопары (тип K, J, T...), термосопротивления (Pt100, Pt1000). Преобразуют в число (обычно 0–27648 для диапазона 0–100%). Аналоговые выходы (AO): Выдают аналоговые сигналы для управления частотниками, регулирующими клапанами, позиционерами. Память ПЛК (на примере Siemens)Область Обозначение Описание Входы I, %IX Образ входов, обновляется каждый цикл Выходы Q, %QX Образ выходов, пишется в физику после цикла Меркеры M, %MX Внутренние биты/байты/слова — "рабочая память" Таймеры T (S7-classic) / IEC-timer Отсчёт времени Счётчики C (S7-classic) / IEC-counter Счёт импульсов Data Blocks DB Блоки данных: рецепты, уставки, история Стандарт МЭК 61131-3: пять языков программированияМеждународный стандарт определяет пять языков для ПЛК. Хороший инженер знает минимум два-три. 1. Ladder Diagram (LD) — Релейно-контактная схемаИсторически первый язык — имитация схем из физических реле. Читается слева направо, как электрическая цепь. Левая шина — "фаза", правая — "ноль". Ток "течёт" если путь замкнут. I0.0 I0.1 Q0.0 Пуск Стоп (НЗ) Выход насос ──┤ ├────┤/├──────────( )── Q0.0 (самоподхват) ──┤ ├── Эта схема — классика: кнопка ПУСК (I0.0) запускает насос (Q0.0), контакт самоподхвата удерживает его включённым, кнопка СТОП (I0.1, нормально-закрытый) его отключает. Преимущества LD: Понятен электрикам без IT-образования, визуально отображает логику цепей, легко отлаживать онлайн (подсвечиваются активные цепи). Недостатки: Громоздкий для сложных вычислений и работы с данными. 2. Function Block Diagram (FBD) — Диаграмма функциональных блоковПрограмма строится из готовых блоков (AND, OR, NOT, таймеры, счётчики, ПИД-регуляторы), соединённых сигнальными линиями. Хорошо подходит для управления потоками сигналов. I0.0 ──┐ ├──[AND]──── Q0.0 I0.1 ──┘ 3. Structured Text (ST) — Структурированный текстЯзык высокого уровня, похожий на Pascal/Ada. Самый мощный для математических вычислений, работы с массивами, строками. (* Программа управления насосом с ПИД *) IF Start AND NOT Stop THEN Running := TRUE; END_IF; IF Stop THEN Running := FALSE; END_IF; (* Расчёт ПИД *) IF Running THEN Error := Setpoint - Feedback; Integral := Integral + Error * CycleTime; Integral := LIMIT(-100.0, Integral, 100.0); (* Ограничение интеграла *) Output := Kp * Error + Ki * Integral + Kd * (Error - PrevError) / CycleTime; Output := LIMIT(0.0, Output, 100.0); PrevError := Error; ELSE Output := 0.0; Integral := 0.0; END_IF; 4. Instruction List (IL) — Список инструкцийАссемблер для ПЛК. Устаревший язык, в новом стандарте МЭК 61131-3 третьей редакции официально deprecated. Знать необязательно. 5. Sequential Function Chart (SFC) — Диаграмма последовательных функцийПохоже на блок-схему или граф состояний. Идеален для описания технологических последовательностей: шаг 1 → условие перехода → шаг 2 → условие → шаг 3... Реальный проект: управление насосной станциейРазберём полноценный пример — система управления двумя насосами с чередованием и защитами. Техническое задание:2 насоса, работают поочерёдно для равномерного износа Автоматическое включение второго при отказе первого Защита от сухого хода (датчик уровня) Защита от давления (реле давления) Ручной/автоматический режим Счётчик моточасов каждого насоса Распределение входов/выходов:ВХОДЫ: I0.0 — Кнопка ПУСК (автоматический режим) I0.1 — Кнопка СТОП I0.2 — Переключатель Авт/Ручной I0.3 — Датчик уровня (нижний предел — сухой ход) I0.4 — Датчик уровня (верхний предел — бак полон) I0.5 — Реле давления насос 1 (авария — нет давления) I0.6 — Реле давления насос 2 I0.7 — Тепловое реле насос 1 (перегрев) I1.0 — Тепловое реле насос 2 I1.1 — Ручное управление насос 1 (в ручном режиме) I1.2 — Ручное управление насос 2 ВЫХОДЫ: Q0.0 — Контактор насос 1 Q0.1 — Контактор насос 2 Q0.2 — Лампа "Работа авто" Q0.3 — Лампа "Авария" Q0.4 — Сирена (авария критическая) Программа на Structured Text (ST):PROGRAM PumpStation (* ===== ПЕРЕМЕННЫЕ ===== *) VAR // Входы btnStart AT %I0.0 : BOOL; btnStop AT %I0.1 : BOOL; swAutoManual AT %I0.2 : BOOL; // TRUE = авто snsLevelLow AT %I0.3 : BOOL; // TRUE = уровень низкий (авария) snsLevelHigh AT %I0.4 : BOOL; // TRUE = бак полон relPressure1 AT %I0.5 : BOOL; // FALSE = нет давления (авария) relPressure2 AT %I0.6 : BOOL; thmRelay1 AT %I0.7 : BOOL; // TRUE = перегрев (авария) thmRelay2 AT %I1.0 : BOOL; btnPump1Manual AT %I1.1 : BOOL; btnPump2Manual AT %I1.2 : BOOL; // Выходы outPump1 AT %Q0.0 : BOOL; outPump2 AT %Q0.1 : BOOL; lampAutoRun AT %Q0.2 : BOOL; lampFault AT %Q0.3 : BOOL; siren AT %Q0.4 : BOOL; // Внутренние переменные SystemRun : BOOL := FALSE; ActivePump : INT := 1; // Какой насос сейчас основной Fault : BOOL := FALSE; FaultCode : INT := 0; Pump1Fault : BOOL := FALSE; Pump2Fault : BOOL := FALSE; // Таймеры TimerPumpStart : TON; // Задержка пуска насоса TimerRotation : TON; // Таймер чередования (8 часов) TimerAlarmDelay : TON; // Задержка подтверждения аварии // Счётчики моточасов Hours_Pump1 : DINT := 0; Hours_Pump2 : DINT := 0; TimerH_Pump1 : TON; TimerH_Pump2 : TON; END_VAR (* ===== ЛОГИКА АВАРИЙ ===== *) // Авария сухого хода — критическая, немедленная остановка IF snsLevelLow THEN Fault := TRUE; FaultCode := 1; // Сухой ход SystemRun := FALSE; END_IF; // Задержанные аварии давления (3 секунды для исключения ложных срабатываний) TimerAlarmDelay(IN := (outPump1 AND NOT relPressure1) OR (outPump2 AND NOT relPressure2), PT := T#3S); IF TimerAlarmDelay.Q THEN IF outPump1 AND NOT relPressure1 THEN Pump1Fault := TRUE; FaultCode := 2; // Нет давления насос 1 END_IF; IF outPump2 AND NOT relPressure2 THEN Pump2Fault := TRUE; FaultCode := 3; // Нет давления насос 2 END_IF; END_IF; // Тепловая защита IF thmRelay1 THEN Pump1Fault := TRUE; FaultCode := 4; // Перегрев насос 1 END_IF; IF thmRelay2 THEN Pump2Fault := TRUE; FaultCode := 5; // Перегрев насос 2 END_IF; // Оба насоса в аварии IF Pump1Fault AND Pump2Fault THEN Fault := TRUE; SystemRun := FALSE; END_IF; (* ===== КОМАНДЫ ПУСК/СТОП ===== *) IF btnStart AND NOT Fault THEN SystemRun := TRUE; END_IF; IF btnStop OR snsLevelHigh THEN // Стоп или бак полон SystemRun := FALSE; END_IF; // Квитирование аварии (нажать СТОП для сброса) IF btnStop THEN Fault := FALSE; FaultCode := 0; Pump1Fault := FALSE; Pump2Fault := FALSE; END_IF; (* ===== АВТОМАТИЧЕСКИЙ РЕЖИМ ===== *) IF swAutoManual AND SystemRun THEN // Чередование каждые 8 часов TimerRotation(IN := SystemRun, PT := T#28800S); // 8 часов = 28800 секунд IF TimerRotation.Q THEN IF ActivePump = 1 THEN ActivePump := 2; ELSE ActivePump := 1; END_IF; TimerRotation(IN := FALSE); // Сброс таймера TimerRotation(IN := TRUE); END_IF; // При аварии основного насоса — переключаемся на резервный IF ActivePump = 1 AND Pump1Fault AND NOT Pump2Fault THEN ActivePump := 2; ELSIF ActivePump = 2 AND Pump2Fault AND NOT Pump1Fault THEN ActivePump := 1; END_IF; // Задержка пуска 1 секунда (защита от дребезга) TimerPumpStart(IN := SystemRun, PT := T#1S); outPump1 := TimerPumpStart.Q AND (ActivePump = 1) AND NOT Pump1Fault; outPump2 := TimerPumpStart.Q AND (ActivePump = 2) AND NOT Pump2Fault; (* ===== РУЧНОЙ РЕЖИМ ===== *) ELSIF NOT swAutoManual THEN outPump1 := btnPump1Manual AND NOT Pump1Fault; outPump2 := btnPump2Manual AND NOT Pump2Fault; ELSE outPump1 := FALSE; outPump2 := FALSE; END_IF; (* ===== СЧЁТЧИКИ МОТОЧАСОВ ===== *) TimerH_Pump1(IN := outPump1, PT := T#1S); IF TimerH_Pump1.Q THEN Hours_Pump1 := Hours_Pump1 + 1; TimerH_Pump1(IN := FALSE); TimerH_Pump1(IN := TRUE); END_IF; TimerH_Pump2(IN := outPump2, PT := T#1S); IF TimerH_Pump2.Q THEN Hours_Pump2 := Hours_Pump2 + 1; END_IF; (* ===== ИНДИКАЦИЯ ===== *) lampAutoRun := SystemRun AND swAutoManual; lampFault := Fault OR Pump1Fault OR Pump2Fault; siren := Fault; // Сирена только при критической аварии END_PROGRAM Таймеры и счётчики: подробноТаймеры и счётчики — основа любой программы ПЛК. В стандарте МЭК 61131-3 они реализованы как функциональные блоки. Типы таймеровTON (Timer On Delay) — таймер с задержкой включения: TimerFan(IN := MotorRun, PT := T#5S); // Q становится TRUE через 5 секунд после включения MotorRun FanStart := TimerFan.Q; TOF (Timer Off Delay) — таймер с задержкой выключения: TimerFan(IN := MotorRun, PT := T#30S); // Q остаётся TRUE ещё 30 секунд после выключения MotorRun // Используется для дополнительного охлаждения после остановки FanRun := TimerFan.Q; TP (Timer Pulse) — таймер импульса: TimerBuzzer(IN := AlarmNew, PT := T#2S); // При фронте AlarmNew генерирует импульс 2 секунды // Независимо от того, сколько ещё держится AlarmNew Buzzer := TimerBuzzer.Q; СчётчикиCTU (Count Up) — счётчик вперёд: CounterBottles(CU := BottleSensor, R := ResetButton, PV := 100); // Считает бутылки, при достижении 100 — Q=TRUE BatchComplete := CounterBottles.Q; CurrentCount := CounterBottles.CV; // Текущее значение CTD (Count Down) — счётчик назад: CounterProducts(CD := ProductSensor, LD := LoadButton, PV := OrderQty); // PV загружается при LD=TRUE OrderComplete := CounterProducts.Q; // Q=TRUE когда CV=0 Работа с аналоговыми сигналамиМасштабирование аналогового входаАналоговый модуль S7-1200 возвращает значение 0–27648 для диапазона 0–100% входного сигнала (4–20мА или 0–10В). Для получения реального значения нужно масштабирование: FUNCTION_BLOCK ScaleAnalog VAR_INPUT RawValue : INT; // Сырое значение от АЦП (0..27648) RawMin : INT; // Мин значение АЦП (обычно 0 или 5530 для 4мА) RawMax : INT; // Макс значение АЦП (обычно 27648) PhysMin : REAL; // Физический минимум (например, 0.0 бар) PhysMax : REAL; // Физический максимум (например, 16.0 бар) END_VAR VAR_OUTPUT PhysValue : REAL; // Результат в физических единицах Broken : BOOL; // Обрыв линии (значение ниже 4мА) END_VAR // Проверка обрыва линии (для 4-20мА: ниже ~5% = обрыв) Broken := (RawValue < (RawMin - 1000)); IF NOT Broken THEN // Линейное масштабирование PhysValue := PhysMin + (REAL(RawValue - RawMin) / REAL(RawMax - RawMin)) * (PhysMax - PhysMin); // Ограничение выхода PhysValue := MAX(PhysMin, MIN(PhysMax, PhysValue)); ELSE PhysValue := PhysMin; // При обрыве — безопасное значение END_IF; END_FUNCTION_BLOCK Использование: // Датчик давления 4-20мА, диапазон 0-16 бар PressureSensor( RawValue := %IW64, // Адрес аналогового входа RawMin := 5530, // 4мА соответствует 5530 RawMax := 27648, // 20мА соответствует 27648 PhysMin := 0.0, PhysMax := 16.0 ); Pressure := PressureSensor.PhysValue; // Давление в барах PressureAlarm := PressureSensor.Broken; // Авария обрыва линии IF Pressure > 12.0 THEN HighPressureAlarm := TRUE; END_IF; Организационные блоки и структура программыПрофессиональная программа ПЛК разделена на функциональные блоки: Организация в TIA Portal (Siemens):OB1 (Main) — Главный цикл ├── FC10: ReadInputs — Чтение и нормализация входов ├── FC20: SafetyLogic — Приоритетные защиты (всегда первыми!) ├── FB30: PumpControl [DB30] — Управление насосами (с памятью) ├── FB40: PIDControl [DB40] — ПИД-регулятор ├── FC50: WriteOutputs — Запись выходов └── FC60: Diagnostics — Диагностика и коммуникации OB35 (Cyclic Interrupt, 10ms) — Быстрые задачи └── FB35: FastCounter — Высокоскоростной счётчик OB82 (I/O Error) — Обработка ошибок I/O-модулей OB121 (Programming Error) — Обработка ошибок программы Принцип: защиты и аварии — всегда в начале главного цикла. Они должны отработать независимо от состояния остальной программы. Отладка и диагностика программыОнлайн-мониторингВ TIA Portal при подключении к ПЛК все блоки отображают реальные значения переменных. В Ladder Diagram активные цепи подсвечиваются зелёным — мгновенно видно что работает. Форсирование переменных (Force)Можно принудительно установить значение входа или переменной для тестирования. Внимание: принудительные значения перекрывают реальные физические сигналы. Не забудьте снять форсирование перед вводом в эксплуатацию! ТрассировкаЗапись значений переменных в реальном времени с временной меткой. Незаменима для поиска редко возникающих ошибок — включаете запись и ждёте появления проблемы. Типичные ошибки начинающих:1. Использование выходных катушек несколько раз в Ladder НЕПРАВИЛЬНО: Цепь 1: I0.0 → Q0.0 (катушка) Цепь 2: I0.1 → Q0.0 (катушка снова!) Вторая катушка перезаписывает первую. Результат Q0.0 определяется только второй цепью. ПРАВИЛЬНО: Цепь 1: I0.0 ──┐ ├── Q0.0 Цепь 2: I0.1 ──┘ 2. Гонка состояний при SET/RESET // ОПАСНО: порядок операций важен IF Condition1 THEN SET(Coil); END_IF; IF Condition2 THEN RESET(Coil); END_IF; // Если оба условия TRUE — RESET побеждает (последний) // Убедитесь, что это желаемое поведение! 3. Деление на ноль // ВСЕГДА проверяйте делитель IF Denominator <> 0.0 THEN Result := Numerator / Denominator; ELSE Result := 0.0; // Безопасное значение END_IF; Коммуникация ПЛК с внешним миромModbus TCP (через Ethernet)Большинство современных ПЛК поддерживают Modbus TCP "из коробки". Это самый распространённый протокол для связи с SCADA, HMI и частотниками. В S7-1200 для Modbus TCP используются системные функциональные блоки: MB_CLIENT — ПЛК как Modbus-мастер (опрашивает устройства) MB_SERVER — ПЛК как Modbus-сервер (отвечает на запросы SCADA) OPC UAСовременный открытый протокол для промышленной коммуникации. Поддерживает семантику данных, безопасность, публикацию/подписку. Все серьёзные ПЛК последних поколений имеют встроенный OPC UA сервер. PROFINET/EtherCATПромышленные реальном-временные сети. PROFINET — стандарт Siemens и Profibus International. EtherCAT — от Beckhoff, исключительно быстрый (цикл 250 мкс). Используются для связи с распределёнными I/O-модулями, сервоприводами, vision-системами. Советы по надёжности программыВсегда инициализируйте переменные — не полагайтесь на "нулевое" начальное значение Используйте watchdog-таймер — если программа "зависла", таймер переводит выходы в безопасное состояние Документируйте каждую переменную — через полгода вы забудете что значит переменная b47 Разделяйте задачи по функциональным блокам — один блок = одна задача Тестируйте на симуляторе перед загрузкой в реальный ПЛК Делайте резервные копии программы перед каждым изменением — версионирование спасало многих Стандартизируйте именование: btnStart — кнопка, snsLevel — датчик, outPump — выход, tmrDelay — таймер ЗаключениеПрограммирование ПЛК — это отдельная инженерная дисциплина на стыке электротехники, автоматики и программирования. Ключевой принцип: программа управляет реальным оборудованием, и любая ошибка может привести к аварии или травме. Поэтому надёжность, защиты и понятность кода здесь важнее красоты архитектуры. Начните с Ladder Diagram — он прозрачен и хорошо отлаживается онлайн. Освойте Structured Text для сложных вычислений. Используйте SFC для технологических последовательностей. И всегда: сначала безопасность, потом функциональность. Хорошая программа ПЛК должна безопасно остановить оборудование при любой нештатной ситуации — потере связи, пропадании питания, выходе из строя датчика. Проектируйте с расчётом на отказ.
Что такое ПЛК и почему это не просто "мощный Arduino"ПЛК (Программируемый Логический Контроллер) — это специализированный промышленный компьютер, разработанный для управления технологическими процессами в реальном времени. Главное отличие от обычного компьютера или Arduino — детерминизм: гарантированное время реакции на входные сигналы, независимо от загрузки процессора. Когда на производстве нужно, чтобы насос включился строго через 50 мс после срабатывания датчика — это ПЛК. Когда допустима задержка в секунду — можно обойтись более дешёвыми решениями. Когда вопрос в надёжности и работе в условиях вибраций, пыли, температур от -40 до +70°C — снова ПЛК. Другие ключевые отличия: Цикличность: программа выполняется повторяющимися циклами (обычно 1–100 мс). Каждый цикл: считать все входы → выполнить программу → записать все выходы Гальваническая развязка входов/выходов: промышленные сигналы (24В DC, 220В AC) изолированы от внутренней логики Горячая замена модулей: во многих системах можно менять I/O-модули без остановки контроллера Встроенная диагностика: ПЛК сам следит за собственным здоровьем Архитектура ПЛК: как это устроеноЦентральный процессорный модуль (CPU)Выполняет программу, управляет обменом данных, содержит основную память. В S7-1200 CPU также имеет встроенные входы/выходы, Ethernet порт и возможность расширения. Модули ввода-вывода (I/O Modules)Дискретные входы (DI): Воспринимают сигналы "есть напряжение / нет напряжения". Обычно 24В DC или 220В AC. Примеры источников: кнопки, концевые выключатели, датчики приближения (индуктивные, ёмкостные), фотодатчики, реле. Дискретные выходы (DO): Управляют исполнительными устройствами. Бывают транзисторные (24В DC, быстрые) и релейные (любое напряжение до 250В AC, медленные, но универсальные). Аналоговые входы (AI): Принимают непрерывные сигналы: 4–20мА, 0–10В, термопары (тип K, J, T...), термосопротивления (Pt100, Pt1000). Преобразуют в число (обычно 0–27648 для диапазона 0–100%). Аналоговые выходы (AO): Выдают аналоговые сигналы для управления частотниками, регулирующими клапанами, позиционерами. Память ПЛК (на примере Siemens)Область Обозначение Описание Входы I, %IX Образ входов, обновляется каждый цикл Выходы Q, %QX Образ выходов, пишется в физику после цикла Меркеры M, %MX Внутренние биты/байты/слова — "рабочая память" Таймеры T (S7-classic) / IEC-timer Отсчёт времени Счётчики C (S7-classic) / IEC-counter Счёт импульсов Data Blocks DB Блоки данных: рецепты, уставки, история Стандарт МЭК 61131-3: пять языков программированияМеждународный стандарт определяет пять языков для ПЛК. Хороший инженер знает минимум два-три. 1. Ladder Diagram (LD) — Релейно-контактная схемаИсторически первый язык — имитация схем из физических реле. Читается слева направо, как электрическая цепь. Левая шина — "фаза", правая — "ноль". Ток "течёт" если путь замкнут. I0.0 I0.1 Q0.0 Пуск Стоп (НЗ) Выход насос ──┤ ├────┤/├──────────( )── Q0.0 (самоподхват) ──┤ ├── Эта схема — классика: кнопка ПУСК (I0.0) запускает насос (Q0.0), контакт самоподхвата удерживает его включённым, кнопка СТОП (I0.1, нормально-закрытый) его отключает. Преимущества LD: Понятен электрикам без IT-образования, визуально отображает логику цепей, легко отлаживать онлайн (подсвечиваются активные цепи). Недостатки: Громоздкий для сложных вычислений и работы с данными. 2. Function Block Diagram (FBD) — Диаграмма функциональных блоковПрограмма строится из готовых блоков (AND, OR, NOT, таймеры, счётчики, ПИД-регуляторы), соединённых сигнальными линиями. Хорошо подходит для управления потоками сигналов. I0.0 ──┐ ├──[AND]──── Q0.0 I0.1 ──┘ 3. Structured Text (ST) — Структурированный текстЯзык высокого уровня, похожий на Pascal/Ada. Самый мощный для математических вычислений, работы с массивами, строками. (* Программа управления насосом с ПИД *) IF Start AND NOT Stop THEN Running := TRUE; END_IF; IF Stop THEN Running := FALSE; END_IF; (* Расчёт ПИД *) IF Running THEN Error := Setpoint - Feedback; Integral := Integral + Error * CycleTime; Integral := LIMIT(-100.0, Integral, 100.0); (* Ограничение интеграла *) Output := Kp * Error + Ki * Integral + Kd * (Error - PrevError) / CycleTime; Output := LIMIT(0.0, Output, 100.0); PrevError := Error; ELSE Output := 0.0; Integral := 0.0; END_IF; 4. Instruction List (IL) — Список инструкцийАссемблер для ПЛК. Устаревший язык, в новом стандарте МЭК 61131-3 третьей редакции официально deprecated. Знать необязательно. 5. Sequential Function Chart (SFC) — Диаграмма последовательных функцийПохоже на блок-схему или граф состояний. Идеален для описания технологических последовательностей: шаг 1 → условие перехода → шаг 2 → условие → шаг 3... Реальный проект: управление насосной станциейРазберём полноценный пример — система управления двумя насосами с чередованием и защитами. Техническое задание:2 насоса, работают поочерёдно для равномерного износа Автоматическое включение второго при отказе первого Защита от сухого хода (датчик уровня) Защита от давления (реле давления) Ручной/автоматический режим Счётчик моточасов каждого насоса Распределение входов/выходов:ВХОДЫ: I0.0 — Кнопка ПУСК (автоматический режим) I0.1 — Кнопка СТОП I0.2 — Переключатель Авт/Ручной I0.3 — Датчик уровня (нижний предел — сухой ход) I0.4 — Датчик уровня (верхний предел — бак полон) I0.5 — Реле давления насос 1 (авария — нет давления) I0.6 — Реле давления насос 2 I0.7 — Тепловое реле насос 1 (перегрев) I1.0 — Тепловое реле насос 2 I1.1 — Ручное управление насос 1 (в ручном режиме) I1.2 — Ручное управление насос 2 ВЫХОДЫ: Q0.0 — Контактор насос 1 Q0.1 — Контактор насос 2 Q0.2 — Лампа "Работа авто" Q0.3 — Лампа "Авария" Q0.4 — Сирена (авария критическая) Программа на Structured Text (ST):PROGRAM PumpStation (* ===== ПЕРЕМЕННЫЕ ===== *) VAR // Входы btnStart AT %I0.0 : BOOL; btnStop AT %I0.1 : BOOL; swAutoManual AT %I0.2 : BOOL; // TRUE = авто snsLevelLow AT %I0.3 : BOOL; // TRUE = уровень низкий (авария) snsLevelHigh AT %I0.4 : BOOL; // TRUE = бак полон relPressure1 AT %I0.5 : BOOL; // FALSE = нет давления (авария) relPressure2 AT %I0.6 : BOOL; thmRelay1 AT %I0.7 : BOOL; // TRUE = перегрев (авария) thmRelay2 AT %I1.0 : BOOL; btnPump1Manual AT %I1.1 : BOOL; btnPump2Manual AT %I1.2 : BOOL; // Выходы outPump1 AT %Q0.0 : BOOL; outPump2 AT %Q0.1 : BOOL; lampAutoRun AT %Q0.2 : BOOL; lampFault AT %Q0.3 : BOOL; siren AT %Q0.4 : BOOL; // Внутренние переменные SystemRun : BOOL := FALSE; ActivePump : INT := 1; // Какой насос сейчас основной Fault : BOOL := FALSE; FaultCode : INT := 0; Pump1Fault : BOOL := FALSE; Pump2Fault : BOOL := FALSE; // Таймеры TimerPumpStart : TON; // Задержка пуска насоса TimerRotation : TON; // Таймер чередования (8 часов) TimerAlarmDelay : TON; // Задержка подтверждения аварии // Счётчики моточасов Hours_Pump1 : DINT := 0; Hours_Pump2 : DINT := 0; TimerH_Pump1 : TON; TimerH_Pump2 : TON; END_VAR (* ===== ЛОГИКА АВАРИЙ ===== *) // Авария сухого хода — критическая, немедленная остановка IF snsLevelLow THEN Fault := TRUE; FaultCode := 1; // Сухой ход SystemRun := FALSE; END_IF; // Задержанные аварии давления (3 секунды для исключения ложных срабатываний) TimerAlarmDelay(IN := (outPump1 AND NOT relPressure1) OR (outPump2 AND NOT relPressure2), PT := T#3S); IF TimerAlarmDelay.Q THEN IF outPump1 AND NOT relPressure1 THEN Pump1Fault := TRUE; FaultCode := 2; // Нет давления насос 1 END_IF; IF outPump2 AND NOT relPressure2 THEN Pump2Fault := TRUE; FaultCode := 3; // Нет давления насос 2 END_IF; END_IF; // Тепловая защита IF thmRelay1 THEN Pump1Fault := TRUE; FaultCode := 4; // Перегрев насос 1 END_IF; IF thmRelay2 THEN Pump2Fault := TRUE; FaultCode := 5; // Перегрев насос 2 END_IF; // Оба насоса в аварии IF Pump1Fault AND Pump2Fault THEN Fault := TRUE; SystemRun := FALSE; END_IF; (* ===== КОМАНДЫ ПУСК/СТОП ===== *) IF btnStart AND NOT Fault THEN SystemRun := TRUE; END_IF; IF btnStop OR snsLevelHigh THEN // Стоп или бак полон SystemRun := FALSE; END_IF; // Квитирование аварии (нажать СТОП для сброса) IF btnStop THEN Fault := FALSE; FaultCode := 0; Pump1Fault := FALSE; Pump2Fault := FALSE; END_IF; (* ===== АВТОМАТИЧЕСКИЙ РЕЖИМ ===== *) IF swAutoManual AND SystemRun THEN // Чередование каждые 8 часов TimerRotation(IN := SystemRun, PT := T#28800S); // 8 часов = 28800 секунд IF TimerRotation.Q THEN IF ActivePump = 1 THEN ActivePump := 2; ELSE ActivePump := 1; END_IF; TimerRotation(IN := FALSE); // Сброс таймера TimerRotation(IN := TRUE); END_IF; // При аварии основного насоса — переключаемся на резервный IF ActivePump = 1 AND Pump1Fault AND NOT Pump2Fault THEN ActivePump := 2; ELSIF ActivePump = 2 AND Pump2Fault AND NOT Pump1Fault THEN ActivePump := 1; END_IF; // Задержка пуска 1 секунда (защита от дребезга) TimerPumpStart(IN := SystemRun, PT := T#1S); outPump1 := TimerPumpStart.Q AND (ActivePump = 1) AND NOT Pump1Fault; outPump2 := TimerPumpStart.Q AND (ActivePump = 2) AND NOT Pump2Fault; (* ===== РУЧНОЙ РЕЖИМ ===== *) ELSIF NOT swAutoManual THEN outPump1 := btnPump1Manual AND NOT Pump1Fault; outPump2 := btnPump2Manual AND NOT Pump2Fault; ELSE outPump1 := FALSE; outPump2 := FALSE; END_IF; (* ===== СЧЁТЧИКИ МОТОЧАСОВ ===== *) TimerH_Pump1(IN := outPump1, PT := T#1S); IF TimerH_Pump1.Q THEN Hours_Pump1 := Hours_Pump1 + 1; TimerH_Pump1(IN := FALSE); TimerH_Pump1(IN := TRUE); END_IF; TimerH_Pump2(IN := outPump2, PT := T#1S); IF TimerH_Pump2.Q THEN Hours_Pump2 := Hours_Pump2 + 1; END_IF; (* ===== ИНДИКАЦИЯ ===== *) lampAutoRun := SystemRun AND swAutoManual; lampFault := Fault OR Pump1Fault OR Pump2Fault; siren := Fault; // Сирена только при критической аварии END_PROGRAM Таймеры и счётчики: подробноТаймеры и счётчики — основа любой программы ПЛК. В стандарте МЭК 61131-3 они реализованы как функциональные блоки. Типы таймеровTON (Timer On Delay) — таймер с задержкой включения: TimerFan(IN := MotorRun, PT := T#5S); // Q становится TRUE через 5 секунд после включения MotorRun FanStart := TimerFan.Q; TOF (Timer Off Delay) — таймер с задержкой выключения: TimerFan(IN := MotorRun, PT := T#30S); // Q остаётся TRUE ещё 30 секунд после выключения MotorRun // Используется для дополнительного охлаждения после остановки FanRun := TimerFan.Q; TP (Timer Pulse) — таймер импульса: TimerBuzzer(IN := AlarmNew, PT := T#2S); // При фронте AlarmNew генерирует импульс 2 секунды // Независимо от того, сколько ещё держится AlarmNew Buzzer := TimerBuzzer.Q; СчётчикиCTU (Count Up) — счётчик вперёд: CounterBottles(CU := BottleSensor, R := ResetButton, PV := 100); // Считает бутылки, при достижении 100 — Q=TRUE BatchComplete := CounterBottles.Q; CurrentCount := CounterBottles.CV; // Текущее значение CTD (Count Down) — счётчик назад: CounterProducts(CD := ProductSensor, LD := LoadButton, PV := OrderQty); // PV загружается при LD=TRUE OrderComplete := CounterProducts.Q; // Q=TRUE когда CV=0 Работа с аналоговыми сигналамиМасштабирование аналогового входаАналоговый модуль S7-1200 возвращает значение 0–27648 для диапазона 0–100% входного сигнала (4–20мА или 0–10В). Для получения реального значения нужно масштабирование: FUNCTION_BLOCK ScaleAnalog VAR_INPUT RawValue : INT; // Сырое значение от АЦП (0..27648) RawMin : INT; // Мин значение АЦП (обычно 0 или 5530 для 4мА) RawMax : INT; // Макс значение АЦП (обычно 27648) PhysMin : REAL; // Физический минимум (например, 0.0 бар) PhysMax : REAL; // Физический максимум (например, 16.0 бар) END_VAR VAR_OUTPUT PhysValue : REAL; // Результат в физических единицах Broken : BOOL; // Обрыв линии (значение ниже 4мА) END_VAR // Проверка обрыва линии (для 4-20мА: ниже ~5% = обрыв) Broken := (RawValue < (RawMin - 1000)); IF NOT Broken THEN // Линейное масштабирование PhysValue := PhysMin + (REAL(RawValue - RawMin) / REAL(RawMax - RawMin)) * (PhysMax - PhysMin); // Ограничение выхода PhysValue := MAX(PhysMin, MIN(PhysMax, PhysValue)); ELSE PhysValue := PhysMin; // При обрыве — безопасное значение END_IF; END_FUNCTION_BLOCK Использование: // Датчик давления 4-20мА, диапазон 0-16 бар PressureSensor( RawValue := %IW64, // Адрес аналогового входа RawMin := 5530, // 4мА соответствует 5530 RawMax := 27648, // 20мА соответствует 27648 PhysMin := 0.0, PhysMax := 16.0 ); Pressure := PressureSensor.PhysValue; // Давление в барах PressureAlarm := PressureSensor.Broken; // Авария обрыва линии IF Pressure > 12.0 THEN HighPressureAlarm := TRUE; END_IF; Организационные блоки и структура программыПрофессиональная программа ПЛК разделена на функциональные блоки: Организация в TIA Portal (Siemens):OB1 (Main) — Главный цикл ├── FC10: ReadInputs — Чтение и нормализация входов ├── FC20: SafetyLogic — Приоритетные защиты (всегда первыми!) ├── FB30: PumpControl [DB30] — Управление насосами (с памятью) ├── FB40: PIDControl [DB40] — ПИД-регулятор ├── FC50: WriteOutputs — Запись выходов └── FC60: Diagnostics — Диагностика и коммуникации OB35 (Cyclic Interrupt, 10ms) — Быстрые задачи └── FB35: FastCounter — Высокоскоростной счётчик OB82 (I/O Error) — Обработка ошибок I/O-модулей OB121 (Programming Error) — Обработка ошибок программы Принцип: защиты и аварии — всегда в начале главного цикла. Они должны отработать независимо от состояния остальной программы. Отладка и диагностика программыОнлайн-мониторингВ TIA Portal при подключении к ПЛК все блоки отображают реальные значения переменных. В Ladder Diagram активные цепи подсвечиваются зелёным — мгновенно видно что работает. Форсирование переменных (Force)Можно принудительно установить значение входа или переменной для тестирования. Внимание: принудительные значения перекрывают реальные физические сигналы. Не забудьте снять форсирование перед вводом в эксплуатацию! ТрассировкаЗапись значений переменных в реальном времени с временной меткой. Незаменима для поиска редко возникающих ошибок — включаете запись и ждёте появления проблемы. Типичные ошибки начинающих:1. Использование выходных катушек несколько раз в Ladder НЕПРАВИЛЬНО: Цепь 1: I0.0 → Q0.0 (катушка) Цепь 2: I0.1 → Q0.0 (катушка снова!) Вторая катушка перезаписывает первую. Результат Q0.0 определяется только второй цепью. ПРАВИЛЬНО: Цепь 1: I0.0 ──┐ ├── Q0.0 Цепь 2: I0.1 ──┘ 2. Гонка состояний при SET/RESET // ОПАСНО: порядок операций важен IF Condition1 THEN SET(Coil); END_IF; IF Condition2 THEN RESET(Coil); END_IF; // Если оба условия TRUE — RESET побеждает (последний) // Убедитесь, что это желаемое поведение! 3. Деление на ноль // ВСЕГДА проверяйте делитель IF Denominator <> 0.0 THEN Result := Numerator / Denominator; ELSE Result := 0.0; // Безопасное значение END_IF; Коммуникация ПЛК с внешним миромModbus TCP (через Ethernet)Большинство современных ПЛК поддерживают Modbus TCP "из коробки". Это самый распространённый протокол для связи с SCADA, HMI и частотниками. В S7-1200 для Modbus TCP используются системные функциональные блоки: MB_CLIENT — ПЛК как Modbus-мастер (опрашивает устройства) MB_SERVER — ПЛК как Modbus-сервер (отвечает на запросы SCADA) OPC UAСовременный открытый протокол для промышленной коммуникации. Поддерживает семантику данных, безопасность, публикацию/подписку. Все серьёзные ПЛК последних поколений имеют встроенный OPC UA сервер. PROFINET/EtherCATПромышленные реальном-временные сети. PROFINET — стандарт Siemens и Profibus International. EtherCAT — от Beckhoff, исключительно быстрый (цикл 250 мкс). Используются для связи с распределёнными I/O-модулями, сервоприводами, vision-системами. Советы по надёжности программыВсегда инициализируйте переменные — не полагайтесь на "нулевое" начальное значение Используйте watchdog-таймер — если программа "зависла", таймер переводит выходы в безопасное состояние Документируйте каждую переменную — через полгода вы забудете что значит переменная b47 Разделяйте задачи по функциональным блокам — один блок = одна задача Тестируйте на симуляторе перед загрузкой в реальный ПЛК Делайте резервные копии программы перед каждым изменением — версионирование спасало многих Стандартизируйте именование: btnStart — кнопка, snsLevel — датчик, outPump — выход, tmrDelay — таймер ЗаключениеПрограммирование ПЛК — это отдельная инженерная дисциплина на стыке электротехники, автоматики и программирования. Ключевой принцип: программа управляет реальным оборудованием, и любая ошибка может привести к аварии или травме. Поэтому надёжность, защиты и понятность кода здесь важнее красоты архитектуры. Начните с Ladder Diagram — он прозрачен и хорошо отлаживается онлайн. Освойте Structured Text для сложных вычислений. Используйте SFC для технологических последовательностей. И всегда: сначала безопасность, потом функциональность. Хорошая программа ПЛК должна безопасно остановить оборудование при любой нештатной ситуации — потере связи, пропадании питания, выходе из строя датчика. Проектируйте с расчётом на отказ. -
 Введение: зачем вообще нужен частотникПредставьте насос, который гоняет воду в системе водоснабжения. Без частотного преобразователя он работает в одном режиме — на полную мощность. Давление в сети выросло — открывается байпасный клапан и лишняя энергия тупо рассеивается. Это как ехать на машине с педалью газа в полу и тормозить ногой одновременно. Частотный преобразователь (ЧП, частотник, VFD — Variable Frequency Drive, инвертор) решает эту проблему радикально: он плавно регулирует скорость электродвигателя, меняя частоту и напряжение питания. Насосу нужно меньше давления — он просто крутится медленнее. Результат: экономия электроэнергии 30–70%, меньше износ оборудования, мягкий пуск без ударных нагрузок. Сегодня частотники стоят везде: насосы, вентиляторы, конвейеры, компрессоры, станки, лифты, краны. Если в вашем производстве есть асинхронный электродвигатель — с вероятностью 80% он или уже управляется частотником, или должен управляться. Принцип работы: что происходит внутриПонимание принципа работы — ключ к правильной настройке и диагностике. Внутри любого частотника три основных блока: 1. Выпрямитель (Rectifier)Входное переменное напряжение (380В/50Гц) выпрямляется в постоянное. Используется трёхфазный диодный мост. На выходе получаем ~540В постоянного тока (380 × √2 ≈ 537В). 2. Звено постоянного тока (DC Bus)Электролитические конденсаторы большой ёмкости сглаживают пульсации выпрямленного напряжения. Именно здесь хранится энергия рекуперации при торможении. Важно: после отключения питания конденсаторы остаются заряженными до 540В в течение нескольких минут. Всегда ждите разряда перед обслуживанием! 3. Инвертор (Inverter)IGBT-транзисторы переключаются по алгоритму ШИМ (широтно-импульсная модуляция) с частотой 2–16 кГц, формируя синусоидальный ток нужной частоты и амплитуды. Именно здесь и происходит "магия" — создание переменного тока с произвольными параметрами. Сеть 380В/50Гц → [Выпрямитель] → 540В DC → [Инвертор ШИМ] → Переменный ток 0-400Гц / 0-380В → Двигатель Типы управления: скалярное vs векторноеЭто первое принципиальное решение при настройке. Выбор не правильный — получите либо плохую динамику, либо нестабильную работу. Скалярное управление (V/f = const)Самый простой алгоритм: соотношение напряжения к частоте держится постоянным. Поднимаем частоту с 50Гц до 25Гц — напряжение тоже снижается вдвое (с 380В до 190В). Магнитный поток ротора остаётся примерно постоянным. Когда использовать: Насосы и вентиляторы (вентиляторная нагрузка) Момент не нужен на малых скоростях Несколько двигателей на одном частотнике Простые конвейеры без точного позиционирования Ограничения: При малых скоростях момент проседает. Нет контроля скорости под нагрузкой — при увеличении нагрузки двигатель чуть замедляется. Векторное управление (Vector Control)Алгоритм управляет не просто частотой и напряжением, а непосредственно вектором магнитного потока и моментом. Два варианта: Без датчика скорости (Sensorless Vector): Математическая модель двигателя внутри частотника оценивает скорость ротора и момент. Требует настройки параметров двигателя (автотюнинг). Точность: ±0.5–2% от номинала. С датчиком скорости (Closed Loop Vector): Энкодер на валу двигателя даёт точную информацию о скорости. Точность: ±0.01–0.1%. Используется в станках, намоточных машинах, лифтах. Когда использовать векторное: Нужен полный момент при нулевой скорости (краны, экструдеры) Точное поддержание скорости под переменной нагрузкой Быстрая динамика разгона/торможения Один двигатель — один частотник Выбор частотника: критерии и расчётМощностьГлавное правило: мощность частотника ≥ мощности двигателя. Для большинства применений выбирают одноступенчатое превышение по каталогу. Например, двигатель 11 кВт — берём частотник 11 кВт или 15 кВт. Поправочные коэффициенты: Условие Коэффициент к мощности Длинный кабель (>50м) ×1.1–1.2 Тяжёлый пуск (компрессор) ×1.25–1.5 Частые пуски/остановы ×1.25 Высокая температура (>40°C) Деrating по паспорту Высота >1000м над уровнем моря Derating 1% на каждые 100м ТокНоминальный ток частотника должен быть не меньше номинального тока двигателя с учётом пиковых нагрузок. Многие приводы имеют режим перегрузки 150% на 60 секунд или 200% на 3 секунды. Серии популярных производителейБюджетный сегмент (учёба, простые задачи): Delta VFD-E, VFD-M — отличное соотношение цена/качество Hyundai N700E — популярны в России Веспер Е5 — отечественный производитель Средний сегмент (промышленность): ABB ACS310, ACS550 — надёжные, хорошая документация Danfoss FC-051, FC-102 — особенно хороши для насосов Schneider Electric Altivar 312, 320 Высокий сегмент (серводрайвы, точное позиционирование): Siemens SINAMICS G120, S120 ABB ACS880 — промышленный стандарт Yaskawa A1000, GA700 Подключение: схема и важные нюансыСиловая частьСеть 3ф 380В | [Автоматический выключатель] ← Защита от КЗ, НЕ защита от перегрузки! | [Сетевой реактор] ← ОБЯЗАТЕЛЬНО при искажённой сети или мощности >15кВт | [Частотник] L1 L2 L3 — вход питания PE — заземление (обязательно!) U V W — выход на двигатель | [Моторный дроссель] ← при кабеле >20м, защита от перенапряжений | [Двигатель] Критические ошибки подключения: Никогда не подключайте выход ЧП к сети! U,V,W — только на двигатель. Никогда не ставьте контактор между ЧП и двигателем без специальной схемы — IGBT умирает мгновенно. Заземление обязательно — без него ЧП работает через паразитные ёмкости и сгорит от статики или помех. Разделяйте силовые и сигнальные кабели — минимум 20–30 см между ними. Управляющая частьТиповое подключение аналогового задания скорости (0–10В): ПЛК/потенциометр → AVI (Analog Voltage Input) — задание частоты ПЛК/кнопка → DI1 (Digital Input 1) — команда ПУСК ПЛК/кнопка → DI2 (Digital Input 2) — команда СТОП ЧП → DO1 (Digital Output 1) → ПЛК — сигнал "работает" ЧП → DO2 (Digital Output 2) → ПЛК/лампа — сигнал "авария" Токовое задание (4–20мА) более помехоустойчиво для длинных кабелей. При 4мА = 0 об/мин, при 20мА = максимальные обороты. Потеря сигнала (обрыв кабеля) → 0мА → частотник видит это как аварию. Основные параметры настройкиКаждый производитель имеет свои номера параметров, но логика везде одинакова. Покажем на примере логики настройки: Группа 1: Параметры двигателяЭто самые важные параметры — частотник должен "знать" двигатель: P_мощность = 7.5 кВт (с шильдика двигателя) P_напряжение = 380 В P_ток = 15.5 А P_частота = 50 Гц P_скорость = 1440 об/мин (или 1450, 1460 — смотреть шильдик) P_cos_phi = 0.86 После ввода этих данных — обязательно запустите автотюнинг (Auto-tuning). Частотник сам измерит активное сопротивление обмоток, индуктивность и другие параметры. Занимает 30–120 секунд. Двигатель при этом либо неподвижен (статический тюнинг), либо вращается (динамический — точнее). Группа 2: ОграниченияМин. частота = 5–10 Гц (ниже нельзя — перегрев двигателя) Макс. частота = 50–60 Гц (можно выше, но нужен расчёт подшипников) Макс. ток = 110–120% от номинала двигателя Группа 3: Разгон и торможениеВремя разгона = 5–30 с (чем тяжелее механизм — тем больше) Время торможения = 5–30 с Тип кривой = S-образная (плавнее для конвейеров, насосов) Слишком короткое время торможения → ошибка OV (перенапряжение в звене DC) → нужен тормозной резистор или увеличить время. Группа 4: Источник задания и управлениеИсточник задания частоты: аналог 0–10В / 4–20мА / цифровые входы / Modbus Источник команды пуск/стоп: цифровые входы / пульт / Modbus Режим управления: скалярный / векторный без датчика / с датчиком ПИД-регулятор в частотникеБольшинство современных ЧП имеют встроенный ПИД-регулятор. Это позволяет строить замкнутую систему управления без внешнего контроллера. Типичный пример: насос с поддержанием давления Датчик давления (4–20мА) → Вход обратной связи ЧП Уставка давления → Задание (аналог или цифровое значение) Выход ПИД → Управляет частотой насоса Настройка ПИД (упрощённый метод Циглера-Николса): Установить I=0, D=0, поднимать P до возникновения устойчивых колебаний Записать критический коэффициент Kc и период колебаний Tc P = 0.6×Kc, I = 2×Tc, D = Tc/8 Для насосов и вентиляторов (инерционная нагрузка) типичные значения: P (пропорциональная составляющая): 20–50% I (интегральная): 2–10 секунд D (дифференциальная): 0–1 секунда (часто не нужна) Важно: Включите функцию Sleep/Wake — при малом потреблении (ночное время) насос останавливается, при снижении давления — запускается. Экономия 15–30% электроэнергии. Защитные функции и их настройкаСовременный частотник — это не просто регулятор, это полноценная система защиты двигателя и механизма. Тепловая защита двигателя (Motor Thermal Protection)Электронный тепловой реле внутри ЧП моделирует нагрев двигателя на основе тока и времени. Задаётся номинальный ток двигателя (I_nom) и тепловая постоянная времени (обычно 30–600 секунд). Гораздо точнее биметаллических реле — учитывает режим работы. Защита от перенапряжения (OV — Over Voltage)Срабатывает когда напряжение в звене DC превышает порог (~800В для 380В-сетей). Причины: резкое торможение (обратная ЭДС двигателя), выброс в сети. Решения: увеличить время торможения, поставить тормозной резистор, включить функцию "регулирование торможения по напряжению DC". Защита от перегрузки (OC — Over Current)Ток превысил допустимый предел. Причины: механическое заклинивание, слишком короткое время разгона, неправильно введены параметры двигателя. Никогда не повышайте порог защиты бездумно — это приведёт к перегреву или сгоранию двигателя. Потеря фазы (Input/Output Phase Loss)Отсутствует одна из фаз входного питания или обрыв в кабеле до двигателя. Критически важная защита — трёхфазный двигатель на двух фазах перегревается за секунды. Коммуникация: Modbus RTU на практикеПочти все промышленные частотники поддерживают Modbus RTU через RS-485. Это позволяет управлять приводом с ПЛК или SCADA без аналоговых сигналов. Типичные Modbus-регистры (адреса условные, смотрите документацию вашего ЧП):Регистр Тип Описание 40001 Holding Управляющее слово (пуск/стоп/реверс) 40002 Holding Задание частоты (×0.01 Гц, т.е. 5000 = 50.00 Гц) 40003 Input Статусное слово (работает/авария) 40004 Input Текущая частота 40005 Input Ток двигателя (×0.1А) 40006 Input Напряжение DC-шины 40007 Input Код последней аварии Пример управления через Python (для тестирования и прототипирования):import minimalmodbus import time # Настройка соединения vfd = minimalmodbus.Instrument('/dev/ttyUSB0', 1) # COM-порт, адрес устройства = 1 vfd.serial.baudrate = 9600 vfd.serial.bytesize = 8 vfd.serial.parity = 'N' vfd.serial.stopbits = 1 vfd.serial.timeout = 0.5 vfd.mode = minimalmodbus.MODE_RTU def vfd_start(): """Команда ПУСК вперёд""" vfd.write_register(0x2000, 0x0002, functioncode=6) # Control word: Run Forward def vfd_stop(): """Команда СТОП (свободный выбег)""" vfd.write_register(0x2000, 0x0001, functioncode=6) # Control word: Stop def vfd_set_freq(freq_hz: float): """Задать частоту в Гц (0.0 - 50.0)""" value = int(freq_hz * 100) # Например 50.0 Гц → 5000 vfd.write_register(0x2001, value, functioncode=6) def vfd_get_status() -> dict: """Считать текущее состояние""" status_word = vfd.read_register(0x2100, functioncode=3) freq = vfd.read_register(0x2101, functioncode=3) / 100.0 current = vfd.read_register(0x2102, functioncode=3) / 10.0 voltage_dc = vfd.read_register(0x2103, functioncode=3) return { 'running': bool(status_word & 0x0001), 'fault': bool(status_word & 0x0008), 'frequency': freq, 'current': current, 'dc_voltage': voltage_dc } # Пример использования try: print("Запуск двигателя...") vfd_set_freq(30.0) # Задаём 30 Гц vfd_start() for i in range(10): time.sleep(2) status = vfd_get_status() print(f"Частота: {status['frequency']} Гц, Ток: {status['current']} А") if status['fault']: print("АВАРИЯ! Проверьте частотник.") break print("Остановка...") vfd_stop() except Exception as e: print(f"Ошибка связи: {e}") Типичные аварии и их устранениеF001 / OC — Сверхток при пускеСимптомы: Ошибка возникает сразу при подаче команды пуск или в первые секунды разгона. Причины и решения: Слишком короткое время разгона → Увеличить в 2–3 раза Механическое заклинивание → Проверить механику, проворачивается ли вал вручную КЗ в кабеле или обмотках → Мегомметром проверить изоляцию кабеля (500В) и двигателя Неверные параметры двигателя → Перепроверить ток, мощность, cos_phi Включён режим векторного управления без автотюнинга → Запустить автотюнинг F002 / OV — Перенапряжение в DC-шинеСимптомы: Ошибка при торможении или при резком снижении нагрузки. Причины и решения: Слишком короткое время торможения → Увеличить время Нет тормозного резистора при большом маховике → Установить резистор Высокое напряжение сети (>415В) → Проверить сеть, возможно нужен трансформатор Включить функцию "Voltage regulation during deceleration" — ЧП сам замедляет торможение F003 / OH — ПерегревСимптомы: После длительной работы или в жаркую погоду. Причины и решения: Загрязнён радиатор → Очистить сжатым воздухом (не водой!) Сломан вентилятор охлаждения → Заменить Недостаточно места для вентиляции → Минимум 10 см сверху и снизу Температура в шкафу >40°C → Добавить принудительную вентиляцию шкафа Слишком высокая частота ШИМ → Снизить с 8кГц до 4кГц (будет чуть громче, но прохладнее) F004 / LV — Пониженное напряжениеСимптомы: При просадке сети или при запуске мощного оборудования рядом. Решения: Проверить напряжение сети мультиметром под нагрузкой Установить сетевой реактор — сглаживает просадки Настроить время повторного пуска после восстановления питания (Auto-restart) Энергосбережение: реальные цифрыЗакон куба: мощность вентилятора/насоса пропорциональна кубу скорости. Снизили скорость на 20% → потребление упало на 49%! P2/P1 = (n2/n1)³ При n1 = 50 Гц, n2 = 40 Гц (снижение на 20%): P2/P1 = (40/50)³ = 0.512 → экономия 48.8%! Реальный пример из практики: вентилятор системы вентиляции цеха, 55 кВт, работал 24/7 на 50 Гц. После установки частотника с датчиком CO2 и ПИД-регулятором: Среднесуточная частота работы: 35–40 Гц Фактическое потребление: снизилось с 55 кВт до 22–28 кВт Годовая экономия: ~250 000 кВт·ч При тарифе 6 руб/кВт·ч: 1 500 000 руб/год Стоимость частотника 55 кВт: ~180 000 руб Срок окупаемости: 6 недель Чек-лист при вводе в эксплуатациюПеред первым пуском обязательно проверить: □ Напряжение питания соответствует номиналу ЧП (380В ±10%) □ Заземление подключено и проверено (<4 Ом) □ Кабели L1-L2-L3 и U-V-W не перепутаны местами □ Нет КЗ между фазами и на землю (мегомметром) □ Введены параметры двигателя (шильдик) □ Проведён автотюнинг □ Настроены ограничения: мин/макс частота, макс ток □ Настроены времена разгона/торможения □ Проверена правильность направления вращения (на малой скорости 5–10 Гц) □ Настроены аварийные выходы и тестирована их реакция □ Записаны все изменённые параметры в документацию ЗаключениеЧастотный преобразователь — один из самых универсальных и окупаемых инструментов в промышленной автоматизации. Правильно подобранный и настроенный, он одновременно экономит электроэнергию, продлевает ресурс двигателя и механического оборудования, даёт возможность тонкого управления технологическим процессом. Ключевые принципы, которые стоит запомнить: выбирайте тип управления под задачу, всегда вводите точные параметры двигателя и делайте автотюнинг, не пренебрегайте сетевыми и моторными дросселями, настраивайте защиты адекватно нагрузке. И помните про безопасность — конденсаторы DC-шины хранят смертельное напряжение ещё несколько минут после отключения питания. Изучите документацию на ваш конкретный привод — производители вкладывают в неё годы опыта тысяч инсталляций. Это лучший источник правильных решений для конкретного устройства.
Введение: зачем вообще нужен частотникПредставьте насос, который гоняет воду в системе водоснабжения. Без частотного преобразователя он работает в одном режиме — на полную мощность. Давление в сети выросло — открывается байпасный клапан и лишняя энергия тупо рассеивается. Это как ехать на машине с педалью газа в полу и тормозить ногой одновременно. Частотный преобразователь (ЧП, частотник, VFD — Variable Frequency Drive, инвертор) решает эту проблему радикально: он плавно регулирует скорость электродвигателя, меняя частоту и напряжение питания. Насосу нужно меньше давления — он просто крутится медленнее. Результат: экономия электроэнергии 30–70%, меньше износ оборудования, мягкий пуск без ударных нагрузок. Сегодня частотники стоят везде: насосы, вентиляторы, конвейеры, компрессоры, станки, лифты, краны. Если в вашем производстве есть асинхронный электродвигатель — с вероятностью 80% он или уже управляется частотником, или должен управляться. Принцип работы: что происходит внутриПонимание принципа работы — ключ к правильной настройке и диагностике. Внутри любого частотника три основных блока: 1. Выпрямитель (Rectifier)Входное переменное напряжение (380В/50Гц) выпрямляется в постоянное. Используется трёхфазный диодный мост. На выходе получаем ~540В постоянного тока (380 × √2 ≈ 537В). 2. Звено постоянного тока (DC Bus)Электролитические конденсаторы большой ёмкости сглаживают пульсации выпрямленного напряжения. Именно здесь хранится энергия рекуперации при торможении. Важно: после отключения питания конденсаторы остаются заряженными до 540В в течение нескольких минут. Всегда ждите разряда перед обслуживанием! 3. Инвертор (Inverter)IGBT-транзисторы переключаются по алгоритму ШИМ (широтно-импульсная модуляция) с частотой 2–16 кГц, формируя синусоидальный ток нужной частоты и амплитуды. Именно здесь и происходит "магия" — создание переменного тока с произвольными параметрами. Сеть 380В/50Гц → [Выпрямитель] → 540В DC → [Инвертор ШИМ] → Переменный ток 0-400Гц / 0-380В → Двигатель Типы управления: скалярное vs векторноеЭто первое принципиальное решение при настройке. Выбор не правильный — получите либо плохую динамику, либо нестабильную работу. Скалярное управление (V/f = const)Самый простой алгоритм: соотношение напряжения к частоте держится постоянным. Поднимаем частоту с 50Гц до 25Гц — напряжение тоже снижается вдвое (с 380В до 190В). Магнитный поток ротора остаётся примерно постоянным. Когда использовать: Насосы и вентиляторы (вентиляторная нагрузка) Момент не нужен на малых скоростях Несколько двигателей на одном частотнике Простые конвейеры без точного позиционирования Ограничения: При малых скоростях момент проседает. Нет контроля скорости под нагрузкой — при увеличении нагрузки двигатель чуть замедляется. Векторное управление (Vector Control)Алгоритм управляет не просто частотой и напряжением, а непосредственно вектором магнитного потока и моментом. Два варианта: Без датчика скорости (Sensorless Vector): Математическая модель двигателя внутри частотника оценивает скорость ротора и момент. Требует настройки параметров двигателя (автотюнинг). Точность: ±0.5–2% от номинала. С датчиком скорости (Closed Loop Vector): Энкодер на валу двигателя даёт точную информацию о скорости. Точность: ±0.01–0.1%. Используется в станках, намоточных машинах, лифтах. Когда использовать векторное: Нужен полный момент при нулевой скорости (краны, экструдеры) Точное поддержание скорости под переменной нагрузкой Быстрая динамика разгона/торможения Один двигатель — один частотник Выбор частотника: критерии и расчётМощностьГлавное правило: мощность частотника ≥ мощности двигателя. Для большинства применений выбирают одноступенчатое превышение по каталогу. Например, двигатель 11 кВт — берём частотник 11 кВт или 15 кВт. Поправочные коэффициенты: Условие Коэффициент к мощности Длинный кабель (>50м) ×1.1–1.2 Тяжёлый пуск (компрессор) ×1.25–1.5 Частые пуски/остановы ×1.25 Высокая температура (>40°C) Деrating по паспорту Высота >1000м над уровнем моря Derating 1% на каждые 100м ТокНоминальный ток частотника должен быть не меньше номинального тока двигателя с учётом пиковых нагрузок. Многие приводы имеют режим перегрузки 150% на 60 секунд или 200% на 3 секунды. Серии популярных производителейБюджетный сегмент (учёба, простые задачи): Delta VFD-E, VFD-M — отличное соотношение цена/качество Hyundai N700E — популярны в России Веспер Е5 — отечественный производитель Средний сегмент (промышленность): ABB ACS310, ACS550 — надёжные, хорошая документация Danfoss FC-051, FC-102 — особенно хороши для насосов Schneider Electric Altivar 312, 320 Высокий сегмент (серводрайвы, точное позиционирование): Siemens SINAMICS G120, S120 ABB ACS880 — промышленный стандарт Yaskawa A1000, GA700 Подключение: схема и важные нюансыСиловая частьСеть 3ф 380В | [Автоматический выключатель] ← Защита от КЗ, НЕ защита от перегрузки! | [Сетевой реактор] ← ОБЯЗАТЕЛЬНО при искажённой сети или мощности >15кВт | [Частотник] L1 L2 L3 — вход питания PE — заземление (обязательно!) U V W — выход на двигатель | [Моторный дроссель] ← при кабеле >20м, защита от перенапряжений | [Двигатель] Критические ошибки подключения: Никогда не подключайте выход ЧП к сети! U,V,W — только на двигатель. Никогда не ставьте контактор между ЧП и двигателем без специальной схемы — IGBT умирает мгновенно. Заземление обязательно — без него ЧП работает через паразитные ёмкости и сгорит от статики или помех. Разделяйте силовые и сигнальные кабели — минимум 20–30 см между ними. Управляющая частьТиповое подключение аналогового задания скорости (0–10В): ПЛК/потенциометр → AVI (Analog Voltage Input) — задание частоты ПЛК/кнопка → DI1 (Digital Input 1) — команда ПУСК ПЛК/кнопка → DI2 (Digital Input 2) — команда СТОП ЧП → DO1 (Digital Output 1) → ПЛК — сигнал "работает" ЧП → DO2 (Digital Output 2) → ПЛК/лампа — сигнал "авария" Токовое задание (4–20мА) более помехоустойчиво для длинных кабелей. При 4мА = 0 об/мин, при 20мА = максимальные обороты. Потеря сигнала (обрыв кабеля) → 0мА → частотник видит это как аварию. Основные параметры настройкиКаждый производитель имеет свои номера параметров, но логика везде одинакова. Покажем на примере логики настройки: Группа 1: Параметры двигателяЭто самые важные параметры — частотник должен "знать" двигатель: P_мощность = 7.5 кВт (с шильдика двигателя) P_напряжение = 380 В P_ток = 15.5 А P_частота = 50 Гц P_скорость = 1440 об/мин (или 1450, 1460 — смотреть шильдик) P_cos_phi = 0.86 После ввода этих данных — обязательно запустите автотюнинг (Auto-tuning). Частотник сам измерит активное сопротивление обмоток, индуктивность и другие параметры. Занимает 30–120 секунд. Двигатель при этом либо неподвижен (статический тюнинг), либо вращается (динамический — точнее). Группа 2: ОграниченияМин. частота = 5–10 Гц (ниже нельзя — перегрев двигателя) Макс. частота = 50–60 Гц (можно выше, но нужен расчёт подшипников) Макс. ток = 110–120% от номинала двигателя Группа 3: Разгон и торможениеВремя разгона = 5–30 с (чем тяжелее механизм — тем больше) Время торможения = 5–30 с Тип кривой = S-образная (плавнее для конвейеров, насосов) Слишком короткое время торможения → ошибка OV (перенапряжение в звене DC) → нужен тормозной резистор или увеличить время. Группа 4: Источник задания и управлениеИсточник задания частоты: аналог 0–10В / 4–20мА / цифровые входы / Modbus Источник команды пуск/стоп: цифровые входы / пульт / Modbus Режим управления: скалярный / векторный без датчика / с датчиком ПИД-регулятор в частотникеБольшинство современных ЧП имеют встроенный ПИД-регулятор. Это позволяет строить замкнутую систему управления без внешнего контроллера. Типичный пример: насос с поддержанием давления Датчик давления (4–20мА) → Вход обратной связи ЧП Уставка давления → Задание (аналог или цифровое значение) Выход ПИД → Управляет частотой насоса Настройка ПИД (упрощённый метод Циглера-Николса): Установить I=0, D=0, поднимать P до возникновения устойчивых колебаний Записать критический коэффициент Kc и период колебаний Tc P = 0.6×Kc, I = 2×Tc, D = Tc/8 Для насосов и вентиляторов (инерционная нагрузка) типичные значения: P (пропорциональная составляющая): 20–50% I (интегральная): 2–10 секунд D (дифференциальная): 0–1 секунда (часто не нужна) Важно: Включите функцию Sleep/Wake — при малом потреблении (ночное время) насос останавливается, при снижении давления — запускается. Экономия 15–30% электроэнергии. Защитные функции и их настройкаСовременный частотник — это не просто регулятор, это полноценная система защиты двигателя и механизма. Тепловая защита двигателя (Motor Thermal Protection)Электронный тепловой реле внутри ЧП моделирует нагрев двигателя на основе тока и времени. Задаётся номинальный ток двигателя (I_nom) и тепловая постоянная времени (обычно 30–600 секунд). Гораздо точнее биметаллических реле — учитывает режим работы. Защита от перенапряжения (OV — Over Voltage)Срабатывает когда напряжение в звене DC превышает порог (~800В для 380В-сетей). Причины: резкое торможение (обратная ЭДС двигателя), выброс в сети. Решения: увеличить время торможения, поставить тормозной резистор, включить функцию "регулирование торможения по напряжению DC". Защита от перегрузки (OC — Over Current)Ток превысил допустимый предел. Причины: механическое заклинивание, слишком короткое время разгона, неправильно введены параметры двигателя. Никогда не повышайте порог защиты бездумно — это приведёт к перегреву или сгоранию двигателя. Потеря фазы (Input/Output Phase Loss)Отсутствует одна из фаз входного питания или обрыв в кабеле до двигателя. Критически важная защита — трёхфазный двигатель на двух фазах перегревается за секунды. Коммуникация: Modbus RTU на практикеПочти все промышленные частотники поддерживают Modbus RTU через RS-485. Это позволяет управлять приводом с ПЛК или SCADA без аналоговых сигналов. Типичные Modbus-регистры (адреса условные, смотрите документацию вашего ЧП):Регистр Тип Описание 40001 Holding Управляющее слово (пуск/стоп/реверс) 40002 Holding Задание частоты (×0.01 Гц, т.е. 5000 = 50.00 Гц) 40003 Input Статусное слово (работает/авария) 40004 Input Текущая частота 40005 Input Ток двигателя (×0.1А) 40006 Input Напряжение DC-шины 40007 Input Код последней аварии Пример управления через Python (для тестирования и прототипирования):import minimalmodbus import time # Настройка соединения vfd = minimalmodbus.Instrument('/dev/ttyUSB0', 1) # COM-порт, адрес устройства = 1 vfd.serial.baudrate = 9600 vfd.serial.bytesize = 8 vfd.serial.parity = 'N' vfd.serial.stopbits = 1 vfd.serial.timeout = 0.5 vfd.mode = minimalmodbus.MODE_RTU def vfd_start(): """Команда ПУСК вперёд""" vfd.write_register(0x2000, 0x0002, functioncode=6) # Control word: Run Forward def vfd_stop(): """Команда СТОП (свободный выбег)""" vfd.write_register(0x2000, 0x0001, functioncode=6) # Control word: Stop def vfd_set_freq(freq_hz: float): """Задать частоту в Гц (0.0 - 50.0)""" value = int(freq_hz * 100) # Например 50.0 Гц → 5000 vfd.write_register(0x2001, value, functioncode=6) def vfd_get_status() -> dict: """Считать текущее состояние""" status_word = vfd.read_register(0x2100, functioncode=3) freq = vfd.read_register(0x2101, functioncode=3) / 100.0 current = vfd.read_register(0x2102, functioncode=3) / 10.0 voltage_dc = vfd.read_register(0x2103, functioncode=3) return { 'running': bool(status_word & 0x0001), 'fault': bool(status_word & 0x0008), 'frequency': freq, 'current': current, 'dc_voltage': voltage_dc } # Пример использования try: print("Запуск двигателя...") vfd_set_freq(30.0) # Задаём 30 Гц vfd_start() for i in range(10): time.sleep(2) status = vfd_get_status() print(f"Частота: {status['frequency']} Гц, Ток: {status['current']} А") if status['fault']: print("АВАРИЯ! Проверьте частотник.") break print("Остановка...") vfd_stop() except Exception as e: print(f"Ошибка связи: {e}") Типичные аварии и их устранениеF001 / OC — Сверхток при пускеСимптомы: Ошибка возникает сразу при подаче команды пуск или в первые секунды разгона. Причины и решения: Слишком короткое время разгона → Увеличить в 2–3 раза Механическое заклинивание → Проверить механику, проворачивается ли вал вручную КЗ в кабеле или обмотках → Мегомметром проверить изоляцию кабеля (500В) и двигателя Неверные параметры двигателя → Перепроверить ток, мощность, cos_phi Включён режим векторного управления без автотюнинга → Запустить автотюнинг F002 / OV — Перенапряжение в DC-шинеСимптомы: Ошибка при торможении или при резком снижении нагрузки. Причины и решения: Слишком короткое время торможения → Увеличить время Нет тормозного резистора при большом маховике → Установить резистор Высокое напряжение сети (>415В) → Проверить сеть, возможно нужен трансформатор Включить функцию "Voltage regulation during deceleration" — ЧП сам замедляет торможение F003 / OH — ПерегревСимптомы: После длительной работы или в жаркую погоду. Причины и решения: Загрязнён радиатор → Очистить сжатым воздухом (не водой!) Сломан вентилятор охлаждения → Заменить Недостаточно места для вентиляции → Минимум 10 см сверху и снизу Температура в шкафу >40°C → Добавить принудительную вентиляцию шкафа Слишком высокая частота ШИМ → Снизить с 8кГц до 4кГц (будет чуть громче, но прохладнее) F004 / LV — Пониженное напряжениеСимптомы: При просадке сети или при запуске мощного оборудования рядом. Решения: Проверить напряжение сети мультиметром под нагрузкой Установить сетевой реактор — сглаживает просадки Настроить время повторного пуска после восстановления питания (Auto-restart) Энергосбережение: реальные цифрыЗакон куба: мощность вентилятора/насоса пропорциональна кубу скорости. Снизили скорость на 20% → потребление упало на 49%! P2/P1 = (n2/n1)³ При n1 = 50 Гц, n2 = 40 Гц (снижение на 20%): P2/P1 = (40/50)³ = 0.512 → экономия 48.8%! Реальный пример из практики: вентилятор системы вентиляции цеха, 55 кВт, работал 24/7 на 50 Гц. После установки частотника с датчиком CO2 и ПИД-регулятором: Среднесуточная частота работы: 35–40 Гц Фактическое потребление: снизилось с 55 кВт до 22–28 кВт Годовая экономия: ~250 000 кВт·ч При тарифе 6 руб/кВт·ч: 1 500 000 руб/год Стоимость частотника 55 кВт: ~180 000 руб Срок окупаемости: 6 недель Чек-лист при вводе в эксплуатациюПеред первым пуском обязательно проверить: □ Напряжение питания соответствует номиналу ЧП (380В ±10%) □ Заземление подключено и проверено (<4 Ом) □ Кабели L1-L2-L3 и U-V-W не перепутаны местами □ Нет КЗ между фазами и на землю (мегомметром) □ Введены параметры двигателя (шильдик) □ Проведён автотюнинг □ Настроены ограничения: мин/макс частота, макс ток □ Настроены времена разгона/торможения □ Проверена правильность направления вращения (на малой скорости 5–10 Гц) □ Настроены аварийные выходы и тестирована их реакция □ Записаны все изменённые параметры в документацию ЗаключениеЧастотный преобразователь — один из самых универсальных и окупаемых инструментов в промышленной автоматизации. Правильно подобранный и настроенный, он одновременно экономит электроэнергию, продлевает ресурс двигателя и механического оборудования, даёт возможность тонкого управления технологическим процессом. Ключевые принципы, которые стоит запомнить: выбирайте тип управления под задачу, всегда вводите точные параметры двигателя и делайте автотюнинг, не пренебрегайте сетевыми и моторными дросселями, настраивайте защиты адекватно нагрузке. И помните про безопасность — конденсаторы DC-шины хранят смертельное напряжение ещё несколько минут после отключения питания. Изучите документацию на ваш конкретный привод — производители вкладывают в неё годы опыта тысяч инсталляций. Это лучший источник правильных решений для конкретного устройства. -
Пользователи не любят ждать. Если кнопка "Отправить" не реагирует три секунды — они уже в Twitter пишут что ваш сайт сломан. Один из самых мощных инструментов для улучшения perceived performance — асинхронная обработка через очереди. Что уходит в очередьВ HTTP-запросе должно происходить только то, что нужно пользователю для немедленного ответа. Что НЕ нужно пользователю немедленно: Отправка email Генерация PDF Пересчёт статистики Синхронизация с внешними системами Изменение размеров изображений Push-уведомления Webhook-уведомления партнёров Всё это — в очередь. HTTP отвечает за 50ms. Фоновый воркер делает остальное. Базовая архитектура очередей на Redis + CI4<?php namespace App\Libraries\Queue; class Queue { private \Redis $redis; private string $prefix = 'queue:'; public function push(string $queueName, BaseJob $job, int $delay = 0): string { $payload = [ 'id' => $id = uniqid('job_', true), 'class' => get_class($job), 'data' => serialize($job), 'attempt' => 0, 'created_at' => time(), ]; if ($delay > 0) { $this->redis->zAdd( $this->prefix . 'delayed:' . $queueName, time() + $delay, json_encode($payload) ); } else { $this->redis->lPush($this->prefix . $queueName, json_encode($payload)); } return $id; } public function pop(string $queueName, int $timeout = 5): ?array { $this->promoteDelayedJobs($queueName); $result = $this->redis->brPop($this->prefix . $queueName, $timeout); return $result ? json_decode($result[1], true) : null; } private function promoteDelayedJobs(string $queueName): void { $delayedKey = $this->prefix . 'delayed:' . $queueName; $jobs = $this->redis->zRangeByScore($delayedKey, '-inf', time()); foreach ($jobs as $job) { $this->redis->multi(); $this->redis->zRem($delayedKey, $job); $this->redis->lPush($this->prefix . $queueName, $job); $this->redis->exec(); } } } Worker — CI4 CLI команда<?php namespace App\Commands; use App\Libraries\Queue\Queue; class QueueWorker extends BaseCommand { protected $name = 'queue:work'; protected $description = 'Process jobs from the queue'; private bool $shouldStop = false; public function run(array $params): void { $queueName = $params[0] ?? 'default'; $maxJobs = (int) ($this->getOption('max-jobs') ?? 0); $processed = 0; if (function_exists('pcntl_signal')) { pcntl_signal(SIGTERM, fn() => $this->shouldStop = true); pcntl_signal(SIGINT, fn() => $this->shouldStop = true); } $queue = new Queue(); while (!$this->shouldStop) { if (function_exists('pcntl_signal_dispatch')) { pcntl_signal_dispatch(); } $payload = $queue->pop($queueName); if (!$payload) continue; $this->processJob($queue, $queueName, $payload); $processed++; if ($maxJobs > 0 && $processed >= $maxJobs) break; } } private function processJob(Queue $queue, string $queueName, array $payload): void { try { $job = unserialize($payload['data']); $job->setAttempt($payload['attempt'] + 1); set_time_limit($job->getTimeout()); $job->handle(); } catch (\Throwable $e) { $payload['attempt']++; if ($payload['attempt'] < $job->getMaxAttempts()) { $delay = pow(2, $payload['attempt']) * 10; $queue->push($queueName, $job, $delay); } else { $job->failed($e); $queue->bury($queueName, $payload); } } } } Реальный пример: отправка email<?php namespace App\Jobs; use App\Libraries\Queue\BaseJob; class SendWelcomeEmailJob extends BaseJob { protected int $maxAttempts = 5; protected int $timeout = 30; public function __construct( private readonly int $userId, private readonly string $email, private readonly string $name ) {} public function handle(): void { service('email')->send( to: $this->email, subject: 'Добро пожаловать!', view: 'emails/welcome', data: ['name' => $this->name] ); model('EmailLogModel')->insert([ 'user_id' => $this->userId, 'type' => 'welcome', 'sent_at' => date('Y-m-d H:i:s'), 'status' => 'sent', ]); } } Использование в Controller: // Вместо: $emailService->send(...); // ждём 500ms // Делаем: $queue = new Queue(); $queue->push('emails', new SendWelcomeEmailJob($user->id, $user->email, $user->name)); // HTTP response за 15ms вместо 515ms return $this->response->setJSON(['status' => 'registered', 'message' => 'Check your email']); РезультатыEndpoint До После POST /register 580ms 45ms POST /upload-photo 2300ms 120ms POST /generate-report 8000ms 80ms (async) POST /checkout 1200ms 340ms Bounce rate на страницах с "тяжёлыми" действиями упал на 34%. Конверсия регистрации выросла на 12%. Просто потому что форма теперь отвечает мгновенно. Пользователи не знают о ваших очередях. Они просто чувствуют что сайт быстрый. Это и есть цель. ⚡ Максим — продуктовый DevOps с горящими глазами и умеренно сгоревшими нервами. Пишу про реальный highload, реальные ошибки и реальные решения. Больше таких историй — на ithub.uno, там собираются те, кто делает, а не только говорит.
-
"Просто добавь серверов" — говорят менеджеры. "Это не так просто" — говорим мы. Сегодня расскажу почему не так просто, и как всё-таки сделать так, чтобы было просто.Проблема №1: Состояние сессийЗапускаете второй сервер, и пользователи жалуются: "я только что вошёл, а меня снова просит логин". Потому что сессия хранится в файловой системе первого сервера. Правильное решение: Redis-сессии: // app/Config/App.php public string $sessionDriver = 'CodeIgniter\Session\Handlers\RedisHandler'; public string $sessionSavePath = 'tcp://redis-cluster:6379?auth=password&database=1'; public int $sessionExpiration = 7200; public bool $sessionMatchIP = false; // Важно! Иначе CDN сломает сессии С Sentinel для HA: public string $sessionSavePath = 'tcp://redis-sentinel:26379?auth=password&database=1&sentinel_master=mymaster'; Проблема №2: Загрузка файловПользователь загружает аватар на сервер #1. Следующий запрос идёт на сервер #2 — он ничего не знает об этом файле. Решение: S3-совместимое хранилище: <?php namespace App\Services; use Aws\S3\S3Client; class FileStorageService { private S3Client $s3; public function __construct() { $config = config('FileStorage'); $this->s3 = new S3Client([ 'version' => 'latest', 'region' => $config->region, 'endpoint' => $config->endpoint, 'credentials' => ['key' => $config->key, 'secret' => $config->secret], 'use_path_style_endpoint' => $config->usePathStyle, ]); } public function upload(string $localPath, string $remotePath, string $acl = 'private'): string { $this->s3->putObject([ 'Bucket' => $this->bucket, 'Key' => $remotePath, 'SourceFile' => $localPath, 'ACL' => $acl, 'ContentType' => mime_content_type($localPath), ]); return $this->getUrl($remotePath); } public function getSignedUrl(string $remotePath, int $expiry = 3600): string { $cmd = $this->s3->getCommand('GetObject', ['Bucket' => $this->bucket, 'Key' => $remotePath]); return (string) $this->s3->createPresignedRequest($cmd, "+{$expiry} seconds")->getUri(); } } Проблема №3: Cron jobs10 серверов, у каждого crontab — пользователи получают email 10 раз. Решение: distributed locking: <?php namespace App\Libraries; class DistributedLock { private string $lockValue; public function __construct( private readonly string $key, private readonly int $ttl = 300 ) { $this->lockValue = gethostname() . '_' . getmypid() . '_' . uniqid(); } public function acquire(): bool { // SET key value NX EX ttl — атомарная операция $result = cache()->getRedis()->set( $this->key, $this->lockValue, ['NX', 'EX' => $this->ttl] ); return $result === true; } public function release(): bool { // Lua для атомарного освобождения только СВОЕГО лока $script = <<<LUA if redis.call("get", KEYS[1]) == ARGV[1] then return redis.call("del", KEYS[1]) else return 0 end LUA; return (bool) cache()->getRedis()->eval($script, [$this->key, $this->lockValue], 1); } } Базовый класс для singleton cron-команд: abstract class SingletonCommand extends BaseCommand { protected int $lockTtl = 300; final public function run(array $params): void { $lock = new DistributedLock('cron_lock_' . static::class, $this->lockTtl); if (!$lock->acquire()) { $this->write("Another instance is already running. Skipping."); return; } try { $this->execute($params); } finally { $lock->release(); } } abstract protected function execute(array $params): void; } Чеклист горизонтального масштабированияПеред тем как добавить второй сервер: ✅ Сессии в Redis/Memcached, не в файловой системе ✅ Файлы в S3/MinIO, не на диск ✅ Кэш в Redis, не в файловой системе ✅ Логи в centralized storage (ELK/Loki) ✅ Cron с distributed locking ✅ Конфиги из environment variables ✅ Нет hardcoded hostname в коде ✅ Нет состояния в оперативной памяти между запросами ✅ Graceful shutdown (SIGTERM handler) ✅ Health checks настроены Если всё это есть — добавление сервера занимает минуты. Если нет — недели головной боли. На ithub.uno таких архитектурных обсуждений всегда много — там есть практические нюансы, которых нет в документации. Масштабируйтесь грамотно. 📊🖥️
-
Это история эволюции. Начнём с того момента, когда деплой выглядел так: "Ваня, выгрузи файлики на сервер через FileZilla". И закончим тем, что у нас сейчас — полностью автоматический pipeline с тестами, security checks, zero-downtime deploy и автоматическим rollback. Эра FTP (тёмные времена)Просто знайте: когда я пришёл в эту компанию, деплой выглядел следующим образом: Разработчик локально делал изменения Открывал FileZilla Перетаскивал папку app/ на сервер Молился Это было в 2019 году. Не в 2009, а в 2019. Такое ещё встречается. Шаг 1: Git + простой CI# .gitlab-ci.yml v1.0 — наивная версия stages: - test - deploy test: stage: test script: - composer install - php vendor/bin/phpunit deploy: stage: deploy script: - ssh deploy@production "cd /var/www/app && git pull && composer install" only: - main git pull на продакшне — это тоже не очень хорошая идея, но это следующий шаг. Шаг 2: Деплой через rsync + atomic switch#!/bin/bash set -euo pipefail DEPLOY_PATH="/var/www" RELEASES_PATH="$DEPLOY_PATH/releases" CURRENT_LINK="$DEPLOY_PATH/current" RELEASE_ID=$(date +%Y%m%d_%H%M%S) RELEASE_PATH="$RELEASES_PATH/$RELEASE_ID" mkdir -p "$RELEASE_PATH" rsync -az --exclude='.git' --exclude='vendor' --exclude='writable' \ ./ "$RELEASE_PATH/" ln -sf "$SHARED_PATH/writable" "$RELEASE_PATH/writable" ln -sf "$SHARED_PATH/.env" "$RELEASE_PATH/.env" cd "$RELEASE_PATH" composer install --no-dev --optimize-autoloader --no-interaction php spark migrate --no-interaction # Атомарное переключение симлинка — zero downtime! ln -sfn "$RELEASE_PATH" "$CURRENT_LINK" nginx -s reload ls -dt "$RELEASES_PATH"/* | tail -n +6 | xargs rm -rf echo "✅ Deploy $RELEASE_ID complete" Rollback: ls -dt /var/www/releases/* | head -2 | tail -1 | xargs -I{} ln -sfn {} /var/www/current nginx -s reload Шаг 3: Docker + KubernetesDockerfile для PHP 8.3 + CI4: FROM composer:2.7 AS vendor-builder WORKDIR /app COPY composer.json composer.lock ./ RUN composer install --no-dev --no-scripts --no-autoloader --prefer-dist COPY . . RUN composer dump-autoload --optimize --classmap-authoritative FROM php:8.3-fpm-alpine AS production RUN apk add --no-cache libzip-dev icu-dev \ && docker-php-ext-install pdo_mysql zip intl opcache \ && pecl install redis igbinary \ && docker-php-ext-enable redis igbinary COPY docker/php/php.ini /usr/local/etc/php/php.ini COPY docker/php/www.conf /usr/local/etc/php-fpm.d/www.conf WORKDIR /var/www/html COPY --from=vendor-builder /app/vendor ./vendor COPY --from=vendor-builder /app/app ./app COPY --from=vendor-builder /app/system ./system COPY --from=vendor-builder /app/public ./public COPY --from=vendor-builder /app/spark ./spark HEALTHCHECK --interval=10s --timeout=3s --retries=3 \ CMD php-fpm -t || exit 1 EXPOSE 9000 USER www-data CMD ["php-fpm"] GitLab CI/CD — финальная версия: stages: - validate - test - security - build - deploy-staging - integration-test - deploy-production - verify variables: DOCKER_IMAGE: $CI_REGISTRY_IMAGE:$CI_COMMIT_SHORT_SHA lint: stage: validate script: - find app/ -name "*.php" -exec php -l {} \; - composer validate --strict unit-tests: stage: test services: - mysql:8.0 - redis:7.0-alpine script: - php spark migrate --env=testing - vendor/bin/phpunit --coverage-min=70 sast: stage: security script: - vendor/bin/psalm --no-cache - composer audit --no-dev build-image: stage: build script: - docker build --target production -t $DOCKER_IMAGE . - docker push $DOCKER_IMAGE deploy-production: stage: deploy-production when: manual # Требует ручного подтверждения! script: - kubectl set image deployment/php-app php-fpm=$DOCKER_IMAGE -n production - kubectl rollout status deployment/php-app -n production --timeout=10m post-deploy-verify: stage: verify script: - sleep 60 - php spark synthetic:run --suite=smoke --env=production - | ERROR_RATE=$(curl -s "http://prometheus/api/v1/query?query=rate(http_errors_total[5m])" | jq '.data.result[0].value[1]') if (( $(echo "$ERROR_RATE > 0.05" | bc -l) )); then echo "Error rate too high! Auto-rollback!" kubectl rollout undo deployment/php-app -n production exit 1 fi Итого: что получилиМетрика FTP era Git + rsync Docker + k8s Время деплоя 5-40 мин 3-8 мин 2-4 мин Downtime при деплое 30s-5min 0 0 Rollback время 10-30 мин 2 мин 45 секунд Деплоев в день 1-2 5-10 20-30 Инцидентов из-за деплоя 2-3/мес 0-1/мес ~0 Больше деплоев в день — это не потому что мы хаотичнее. Маленькие частые деплои безопаснее больших редких. Каждый PR идёт в прод в тот же день. Это называется continuous delivery. И это меняет жизнь. 🚀
-
Есть два типа DevOps. Первые узнают об авариях от пользователей. Вторые — за 5 минут до того как проблема станет аварией. Я прошёл путь от первого ко второму. Это было долго, больно и неочевидно. Расскажу как. Уровень 0: Никакого мониторингаЭто страшное место. Узнаёшь что что-то не так, когда: Пишет пользователь в поддержку Звонит CEO в воскресенье Видишь в Twitter "ваш сайт сломан" Это лечится быстро — после первого воскресного звонка от CEO инстинкт самосохранения быстро мотивирует к действию. Уровень 1: Uptime monitoringСамое простое: проверяем что сайт отвечает: class HealthCheck extends BaseCommand { protected $name = 'health:check'; public function run(array $params): void { $endpoints = config('HealthCheck')->endpoints; foreach ($endpoints as $endpoint) { $start = microtime(true); try { $response = \Config\Services::curlrequest()->get($endpoint['url'], [ 'timeout' => 10, 'http_errors' => false, ]); $duration = (microtime(true) - $start) * 1000; $status = $response->getStatusCode(); if ($status !== 200 || $duration > $endpoint['threshold_ms']) { $this->alertTeam($endpoint, $status, $duration); } } catch (\Exception $e) { $this->alertTeam($endpoint, 0, 0, $e->getMessage()); } } } } Лучше чем ничего. Но это как термометр в одной комнате большого дома. Уровень 2: Application метрикиPrometheus + Grafana. В CI4 интегрируем через After-фильтр: <?php namespace App\Filters; class MetricsFilter implements FilterInterface { public function before(RequestInterface $request, $arguments = null): void { $GLOBALS['_request_start_time'] = microtime(true); } public function after( RequestInterface $request, ResponseInterface $response, $arguments = null ): ResponseInterface { $duration = microtime(true) - ($GLOBALS['_request_start_time'] ?? microtime(true)); $status = $response->getStatusCode(); $route = service('router')->controllerName(); $method = $request->getMethod(); $metrics = service('metricsCollector'); $metrics->histogram( 'http_request_duration_seconds', $duration, ['method' => $method, 'route' => $route, 'status' => $status] ); $metrics->counter( 'http_requests_total', 1, ['method' => $method, 'route' => $route, 'status' => (string)intdiv($status, 100) . 'xx'] ); if ($status >= 500) { $metrics->counter('http_errors_total', 1, ['route' => $route]); } return $response; } } Уровень 3: Предиктивные алертыНастоящий прорыг — когда алерты стали срабатывать ДО того как всё упало. Пример: за 8-12 минут до OOM Redis всегда происходило: Memory usage рос быстрее обычного (+15% за 5 минут) Cache hit rate начинал падать Eviction rate был 0 Prometheus alerting rule: groups: - name: redis_predictive rules: - alert: RedisMemoryGrowthAnomaly expr: | ( redis_memory_used_bytes / redis_memory_max_bytes > 0.75 ) and ( rate(redis_memory_used_bytes[5m]) > 0 ) and ( redis_stat_keyspace_hits / (redis_stat_keyspace_hits + redis_stat_keyspace_misses) < 0.85 ) for: 3m labels: severity: warning annotations: summary: "Redis memory growing fast, potential OOM in ~10min" - alert: MySQLConnectionPoolDanger expr: | mysql_global_status_threads_connected / mysql_global_variables_max_connections > 0.8 for: 2m labels: severity: critical annotations: summary: "MySQL connection pool at {{ $value | humanizePercentage }}" Уровень 4: Synthetic monitoringПроверяем что реальный пользовательский сценарий работает end-to-end. CLI-команда CI4 каждые 2 минуты симулирует key user journey: namespace App\Commands\Synthetic; class CheckoutFlow extends BaseCommand { protected $name = 'synthetic:checkout'; public function run(array $params): void { $client = service('curlrequest'); $baseUrl = env('SYNTHETIC_BASE_URL'); $metrics = service('metricsCollector'); $start = microtime(true); $step = 'init'; try { $step = 'login'; $loginResp = $client->post($baseUrl . '/api/auth/login', [ 'json' => ['email' => env('SYNTHETIC_USER_EMAIL'), 'password' => env('SYNTHETIC_USER_PASSWORD')], 'timeout' => 5, ]); assert($loginResp->getStatusCode() === 200); $token = json_decode($loginResp->getBody(), true)['token']; $step = 'product_list'; $productsResp = $client->get($baseUrl . '/api/products', [ 'headers' => ['Authorization' => "Bearer $token"], 'timeout' => 3, ]); assert($productsResp->getStatusCode() === 200); // ... другие шаги $metrics->counter('synthetic_checkout_flow_success_total', 1); $this->write("✅ Checkout flow OK "); } catch (\Throwable $e) { $metrics->counter('synthetic_checkout_flow_failure_total', 1, ['step' => $step]); service('alertManager')->fire(level: 'critical', title: "Synthetic checkout failed at: {$step}", body: $e->getMessage()); } } } Текущий стек мониторингаPrometheus — сбор метрик Grafana — визуализация и алертинг Loki — агрегация логов Alertmanager — маршрутизация (Telegram, PagerDuty, Slack) Synthetic monitoring — CI4 CLI команды в cron OpenTelemetry + Jaeger — distributed tracing MTTR за год: Период MTTR До нормального мониторинга 47 минут После 8 минут Это не просто красивая цифра. Это живые деньги. Мониторинг — это бизнес-инвестиция с прямым ROI. 📈
-
Когда PHP 8.0 вышел с JIT-компилятором, интернет взорвался. "PHP теперь БЫСТРЕЕ Python!" "JIT изменит всё!" "Переписывайте на PHP!". Заголовки были прекрасны. Реальность — немного иначе. Я потратил месяц на бенчмарки JIT в нашем реальном highload-проекте на PHP 8.3 + CodeIgniter 4.6. Расскажу что нашёл. Без маркетинга, только цифры и контекст. Немного теории (обещаю, коротко)JIT (Just-In-Time compilation) — это компиляция горячего кода в нативные машинные инструкции во время выполнения. В отличие от OPcache, который кэширует opcode (байткод PHP), JIT генерирует настоящий машинный код. PHP реализует два режима JIT: Tracing JIT (jit=tracing) — анализирует трассы выполнения, оптимизирует горячие пути. Лучше для численных вычислений. Function JIT (jit=function) — компилирует целые функции. Более предсказуемый, но менее агрессивный. Конфигурация в php.ini: [opcache] opcache.enable=1 opcache.jit=tracing opcache.jit_buffer_size=256M opcache.jit_hot_loop=64 opcache.jit_hot_func=127 opcache.jit_hot_return=8 opcache.jit_hot_side_exit=8 Бенчмарк 1: Мандельброт (классика)function mandelbrot(float $x0, float $y0): int { $x = 0.0; $y = 0.0; $iteration = 0; $maxIteration = 1000; while ($x * $x + $y * $y <= 4.0 && $iteration < $maxIteration) { $xTemp = $x * $x - $y * $y + $x0; $y = 2.0 * $x * $y + $y0; $x = $xTemp; $iteration++; } return $iteration; } Результаты: Конфигурация Время PHP 8.3, OPcache off 8.43s PHP 8.3, OPcache on, JIT off 4.21s PHP 8.3, OPcache on, JIT tracing 0.84s PHP 8.3, OPcache on, JIT function 1.12s JIT Tracing ускорил Мандельброт в 5 раз. Потрясающий результат! Но кто в вашем web-приложении считает Мандельброт? Бенчмарк 2: Реальный CI4 requestРезультаты на типичном API endpoint (среднее по 10,000 запросов): Конфигурация Среднее время P99 OPcache on, JIT off 42.3ms 89ms OPcache on, JIT tracing 41.8ms 87ms OPcache on, JIT function 42.1ms 88ms Разница: 1.2%. Это в пределах погрешности измерений. Почему JIT не помогает веб-приложениямТипичный PHP web-request проводит время примерно так: ~45% — ожидание БД (I/O bound) ~25% — сетевые операции (Redis, внешние API) ~15% — OPcache-оптимизированный PHP-код ~10% — сериализация/десериализация (JSON, etc.) ~5% — собственно бизнес-логика с вычислениями JIT помогает именно с CPU-bound вычислениями. Но в web-запросе CPU-bound части — это ~20% от общего времени. Максимальное теоретическое ускорение: 16%. На практике — 1-3%. Правильная конфигурация для highload CI4[opcache] opcache.enable=1 opcache.enable_cli=0 opcache.memory_consumption=256 opcache.interned_strings_buffer=32 opcache.max_accelerated_files=20000 opcache.validate_timestamps=0 ; В prod — ВСЕГДА 0 opcache.save_comments=1 ; CI4 использует атрибуты opcache.preload=/var/www/app/preload.php opcache.preload_user=www-data opcache.jit=tracing opcache.jit_buffer_size=128M opcache.jit_hot_loop=64 opcache.jit_hot_func=127 И обязательно — preload для CI4: <?php // preload.php $preloadClasses = [ \App\Models\UserModel::class, \App\Models\ProductModel::class, \App\Libraries\Cache\ResilientCacheService::class, \App\Services\AuthService::class, // ... топ-50 самых используемых классов ]; foreach ($preloadClasses as $class) { if (class_exists($class)) { opcache_compile_file((new \ReflectionClass($class))->getFileName()); } } С preload время ответа на первые запросы после деплоя сократилось с 200ms до 45ms. Это важнее JIT. Итог: стоит ли включать JIT?Включайте, если: У вас PHP 8.1+ (в 8.0 JIT был сыроват) Есть CPU-bound операции (обработка данных, вычисления) Достаточно памяти для JIT buffer Не ждите чудес, если: Приложение I/O-bound (БД, Redis, внешние API) Это стандартное CRUD web-приложение Надеетесь что JIT заменит оптимизацию запросов Прежде чем думать о JIT, убедитесь что правильно настроен OPcache, нет N+1 запросов, есть кэширование и нормальные индексы в БД. Это даст 10-100× ускорение. JIT — ещё 1-5% сверху. Но 5% при 10 миллионах запросов в сутки — тоже деньги. Поэтому включайте. Просто знайте зачем. 📊
-
Это не та история, которой гордятся. Это история, которую рассказывают тихо, за пивом, другим DevOps'ам — чтобы они не совершили те же ошибки. Но знаете что? Я решил рассказать её громко. Потому что честность важнее репутации, а реальные истории учат лучше, чем придуманные кейсы. Black Friday. Наш e-commerce на CI4. Трафик × 15 от обычного. Что могло пойти не так? Спойлер: всё. Подготовка (которой, как оказалось, было недостаточно)За три недели до BF мы провели "подготовку". По тем временам нам казалось, что мы сделали всё правильно: ✅ Провели нагрузочный тест на 5× нормального трафика ✅ Настроили автомасштабирование k8s ✅ Прогрели CDN-кэш для статики ✅ Оптимизировали топ-20 медленных запросов ✅ Увеличили connection pool MySQL ✅ Настроили алерты Что мы не сделали (и о чём потом пожалели): ❌ Не протестировали 15× трафика (только 5×) ❌ Не протестировали scenario с высоким числом одновременных checkout операций ❌ Не проверили поведение при частичном отказе зависимостей ❌ Не подготовили runbook для дежурной команды Хронология событий00:00 — Midnight madness старт Трафик начал расти в 23:45. К полуночи — ×4 от нормы. Всё отлично, k8s масштабируется, метрики в норме, team в Teams чатится позитивно. 00:23 — Первый звонок 🔴 ALERT: Checkout error rate > 5% 5% checkout'ов не проходят. Это много. Начинаем копать. В логах: Deadlock found when trying to get lock; try restarting transaction MySQL deadlock. Два процесса пытались обновить одну и ту же запись в таблице inventory (остатки товаров) одновременно. При ×4 трафике вероятность коллизии выросла критически. Быстрое решение: добавили SELECT ... FOR UPDATE с retry-логикой: public function decrementStock(int $productId, int $quantity): bool { $maxRetries = 3; $retryDelay = 100; // ms for ($attempt = 1; $attempt <= $maxRetries; $attempt++) { $this->db->transStart(); try { $product = $this->db ->table('inventory') ->where('product_id', $productId) ->lockForUpdate() ->get() ->getRowArray(); if ($product['stock'] < $quantity) { $this->db->transRollback(); return false; } $this->db->table('inventory') ->where('product_id', $productId) ->update(['stock' => $product['stock'] - $quantity]); $this->db->transCommit(); return true; } catch (\Exception $e) { $this->db->transRollback(); if ($attempt < $maxRetries && str_contains($e->getMessage(), 'Deadlock')) { usleep($retryDelay * 1000 * $attempt); continue; } throw $e; } } return false; } Деплой. Прошло. Продолжаем. 01:47 — Главное событие 🔴 CRITICAL: Database primary unreachable 🔴 CRITICAL: All checkout endpoints down 🔴 CRITICAL: Payment service timeout MySQL primary упал. Не лёг — упал. Полностью. Причина выяснилась позже: диск заполнился из-за бинарных логов (binary log retention не был настроен для ситуации с × 15 write операциями). df -h /var/lib/mysql # Filesystem: 100% used (512GB / 512GB) 512 гигабайт. Всё. Диск кончился. MySQL не может писать — MySQL падает. Элегантно, ничего не скажешь. Автоматический failover сработал — реплика стала primary. Это заняло 23 секунды. 23 секунды — 100% ошибок на checkout. При трафике BF это $147,000 потерянной выручки. За двадцать три секунды. Затем выяснилось: наша реплика не была настроена на роль primary. У неё не было некоторых критических stored procedures. Checkout стал работать, но с ошибками 15%. Следующие 40 минут команда в поту накатывала stored procedures на новый primary, чистила binlogs на упавшем сервере (он был ещё нужен), настраивала новую репликацию. 02:47 — Всё относительно стабильно Error rate 2.3%. Для BF — терпимо, но не хорошо. 04:15 — Redis OOM OOM command not allowed when used memory > 'maxmemory' Redis закончил память. Eviction policy была noeviction — вместо того чтобы выкидывать старые ключи, Redis начал отклонять все write-операции. Приложение посыпалось. Быстрый фикс: redis-cli CONFIG SET maxmemory-policy allkeys-lru LRU eviction включён. Redis начал вытеснять старые ключи. Кэш-хиты упали с 94% до 61%, нагрузка на MySQL снова выросла, но хотя бы приложение работало. Постмортем: что пошло не такПричина 1: Мы не тестировали реальный сценарий Нагрузочный тест в ×5 — это не BF при ×15. Мы протестировали "всё нормально", а не "всё горит". Нужно было делать chaos testing: убивать primary во время нагрузки, заполнять диск, устраивать OOM Redis. Причина 2: MySQL binlog retention -- Должно быть настроено! SET GLOBAL binlog_expire_logs_seconds = 86400; -- 24 часа Это одна строчка. ОДНА. И она бы предотвратила заполнение диска. Причина 3: Replica не была готова к роли primary Наша "репликация" была настроена для read scaling, а не для failover. Stored procedures, triggers, специфичные настройки — ничего из этого не дублировалось. Это фундаментальная ошибка в архитектуре HA. Причина 4: Redis maxmemory-policy noeviction Кто-то (я) настроил noeviction "чтобы данные не терялись". Логика благородная. Результат катастрофический. В production eviction лучше, чем полный отказ сервиса. Что изменилось после1. GameDay — обязательная практика Раз в квартал мы проводим "день катастрофы": специально ломаем production-like окружение и смотрим как команда реагирует. Сценарии: упал primary MySQL, заполнился диск, OOM Redis, одна нода k8s недоступна. 2. Runbook для каждого critical alert Каждый алерт в PagerDuty теперь ссылается на confluence-страницу с пошаговым runbook. Дежурный не должен думать — он должен читать и выполнять. 3. Pre-BF чеклист # Automated pre-event checks ./scripts/pre-event-check.sh # Checks: # ✓ MySQL disk usage < 50% # ✓ Binlog retention configured # ✓ Redis maxmemory-policy = allkeys-lru # ✓ Replica can promote to primary (stored procs present) # ✓ HPA max replicas sufficient # ✓ CDN cache warm # ✓ All alerts configured and tested # ✓ On-call rotation confirmed # ✓ Rollback plan documented Финансовые итогиОбщие потери от инцидентов BF: ~$230,000 (прямые потери выручки + компенсации + репутационный ущерб). Следующий год, после всех изменений: BF прошёл без единого critical инцидента. Error rate — 0.08%. Выручка выросла на 340% по сравнению с прошлым BF. Цена нормальной подготовки: 3 недели работы команды + $15,000 на gameday инфраструктуру. Разница: 230,000 vs 15,000. Выбор очевиден. Делитесь похожими историями — на ithub.uno такие postmortem'ы читают и обсуждают живее всего. Потому что в них — настоящий опыт. 💀➡️🧠
-
Есть проблемы, о которых говорят на каждой конференции, пишут в каждом учебнике и которые всё равно продолжают жить в каждом втором продакшн-проекте. N+1 — именно такая. Это как тараканы: знаешь о них, ведёшь с ними борьбу, думаешь что победил — а потом открываешь новый модуль и привет. Сегодня расскажу про реальный кейс из нашего highload-проекта на PHP 8.2 + CodeIgniter 4. И покажу, как мы с этим боролись системно, а не точечными заплатками. Что такое N+1 на практикеТеория все знают. Загружаешь список из N объектов, потом для каждого делаешь ещё один запрос. Итого 1 + N запросов вместо 1-2. При N=100 это 101 запрос вместо 2. Ничего страшного, да? Нет. Вот реальный пример из нашего кода. Страница со списком заказов: // OrderModel.php — выглядит невинно public function getOrdersList(int $page = 1): array { $orders = $this->paginate(50); foreach ($orders as &$order) { // Запрос #1 ... #50: грузим пользователя $order['user'] = model('UserModel')->find($order['user_id']); // Запрос #51 ... #100: грузим товары заказа $order['items'] = model('OrderItemModel') ->where('order_id', $order['id']) ->findAll(); // Запрос #101 ... #150: грузим статус доставки $order['delivery'] = model('DeliveryModel') ->where('order_id', $order['id']) ->first(); } return $orders; } 50 заказов на странице. Итого: 1 (список) + 50 (пользователи) + 50 (товары) + 50 (доставка) = 151 запрос. На страницу. Которую открывают 500 раз в минуту. Итого 75,500 запросов в минуту только на эту одну страницу. MySQL рыдал. Тихо, но рыдал. Обнаружение: логирование запросов в CI4Первым шагом была инструментация. CI4 позволяет логировать все запросы через Toolbar, но в highload нам нужно что-то более production-ready. Мы написали EventSubscriber, который считает запросы на request: <?php namespace App\Subscribers; use CodeIgniter\Events\Events; class QueryCounterSubscriber { private static int $queryCount = 0; private static array $slowQueries = []; public static function register(): void { Events::on('DBQuery', [self::class, 'onQuery']); } public static function onQuery(\CodeIgniter\Database\Query $query): void { self::$queryCount++; $duration = $query->getDuration(6); if ($duration > 0.1) { // 100ms threshold self::$slowQueries[] = [ 'sql' => $query->getQuery(), 'duration' => $duration, 'trace' => debug_backtrace(DEBUG_BACKTRACE_IGNORE_ARGS, 10), ]; } if (self::$queryCount > 50) { log_message('warning', sprintf( 'N+1 suspicion: %d queries for %s %s', self::$queryCount, service('request')->getMethod(), service('request')->getUri()->getPath() )); } } public static function getReport(): array { return [ 'total' => self::$queryCount, 'slow_queries' => self::$slowQueries, ]; } } Через неделю мы нашли 23 endpoint'а с N+1. Некоторые делали до 800 запросов за один HTTP request. Один из них — статистическая страница для администратора — делал 1,247 запросов. Нет, это не опечатка. Решение 1: Eager Loading через Query BuilderВ CI4 нет встроенного ORM с eager loading как в Laravel. Но это не повод делать N+1. Пишем вручную — это даже лучше, потому что контролируешь каждый запрос: <?php namespace App\Models; class OrderModel extends Model { public function getOrdersWithRelations(int $page = 1): array { // Запрос 1: список заказов $orders = $this->paginate(50); if (empty($orders)) { return []; } $orderIds = array_column($orders, 'id'); $userIds = array_unique(array_column($orders, 'user_id')); // Запрос 2: все пользователи одним запросом $users = model('UserModel') ->whereIn('id', $userIds) ->findAll(); $usersMap = array_column($users, null, 'id'); // Запрос 3: все товары заказов одним запросом $items = model('OrderItemModel') ->whereIn('order_id', $orderIds) ->findAll(); $itemsMap = []; foreach ($items as $item) { $itemsMap[$item['order_id']][] = $item; } // Запрос 4: вся доставка одним запросом $deliveries = model('DeliveryModel') ->whereIn('order_id', $orderIds) ->findAll(); $deliveriesMap = array_column($deliveries, null, 'order_id'); // Собираем результат в памяти foreach ($orders as &$order) { $order['user'] = $usersMap[$order['user_id']] ?? null; $order['items'] = $itemsMap[$order['id']] ?? []; $order['delivery'] = $deliveriesMap[$order['id']] ?? null; } return $orders; } } 151 запрос → 4 запроса. Время ответа страницы: с 3.2 секунды до 87 миллисекунд. Разница в 37 раз. Буквально изменением подхода к написанию одного метода. Решение 2: Автоматическое обнаружение в CI4 FilterЧтобы N+1 не возвращались незаметно, добавили Filter для development/staging: <?php namespace App\Filters; use CodeIgniter\Filters\FilterInterface; use CodeIgniter\HTTP\RequestInterface; use CodeIgniter\HTTP\ResponseInterface; class QueryAnalyzerFilter implements FilterInterface { private const WARNING_THRESHOLD = 30; private const ERROR_THRESHOLD = 100; public function before(RequestInterface $request, $arguments = null): void { QueryCounterSubscriber::reset(); } public function after( RequestInterface $request, ResponseInterface $response, $arguments = null ): ResponseInterface { $report = QueryCounterSubscriber::getReport(); $count = $report['total']; if ($count >= self::WARNING_THRESHOLD) { $level = $count >= self::ERROR_THRESHOLD ? 'error' : 'warning'; log_message($level, sprintf( '[QueryAnalyzer] %s %s: %d queries', $request->getMethod(), $request->getUri()->getPath(), $count )); if (ENVIRONMENT === 'development') { $response->setHeader('X-Query-Count', (string) $count); $response->setHeader('X-Query-Warning', $count >= self::ERROR_THRESHOLD ? 'N+1_DETECTED' : 'HIGH_QUERIES'); } } return $response; } } Теперь любой новый endpoint с N+1 автоматически логируется с уровнем error. Это попадает в наш ELK стек, алертинг срабатывает, приходит уведомление. Разработчик узнаёт о проблеме ещё на code review этапе, а не когда MySQL упал в прод. Цифры до и послеEndpoint Запросов ДО Запросов ПОСЛЕ Время ответа ДО Время ПОСЛЕ Список заказов 151 4 3200ms 87ms Профиль пользователя 89 3 1800ms 45ms Каталог товаров 347 5 8900ms 210ms Статистика 1247 12 31000ms 890ms Суммарная нагрузка на MySQL упала на 78%. Не шучу. Просто убрали N+1 — и почти вдвое освободили ресурсы БД. Главный выводN+1 — это не ошибка джуниоров. Это системная проблема, которая возникает когда нет инструментов для её обнаружения и нет культуры её предотвращения. Добавьте автоматическое логирование числа запросов. Сделайте Code Review check на паттерны N+1. И помните: каждый .find() внутри цикла — это потенциальная бомба. Удачи вашим базам данных. 🗄️
-
Прежде чем начать, хочу сказать одну важную вещь: я люблю Kubernetes. Искренне. Как любят сложного человека — за глубину, за то, что никогда не знаешь чего ожидать, за то, что каждый день чему-то учишься. И одновременно хочется иногда взять его и... ну, вы понимаете. Восемнадцать месяцев в продакшне с k8s. Сорок семь инцидентов в PagerDuty. Из них тридцать один — "это мы сами виноваты". Остальные шестнадцать — "это k8s виноват, но мы неправильно его настроили". Итого: сорок семь раз мы были виноваты сами. Добро пожаловать в правду. Начало: эйфорияМы переехали на k8s с bare-metal + ansible + systemd. По тем временам это был большой шаг. Наконец-то: декларативная конфигурация, автомасштабирование, rolling updates без даунтайма, самолечение. Красота! Первая неделя прошла в написании манифестов. Я писал их как поэт — вдохновенно, не жалея строк. YAML цвёл. Deployments, Services, ConfigMaps, Secrets, Ingress — всё было прекрасно. apiVersion: apps/v1 kind: Deployment metadata: name: php-app spec: replicas: 3 template: spec: containers: - name: php-fpm image: myapp:latest # ← вот здесь уже первая мина resources: requests: memory: "256Mi" cpu: "250m" limits: memory: "512Mi" cpu: "500m" image: myapp:latest — это первая из ошибок, которая позже стоила нам часа даунтайма. Тег latest — это зло. Это не версия, это "бог знает что". При следующем деплое k8s может подтянуть другой образ на разные ноды, и у вас будет кластер, где половина подов — старая версия, а половина — новая, и они несовместимы. Всегда используйте immutable теги: git sha, semver, timestamp. Всегда. Инцидент #7: OOMKiller приходит ночьюНаше PHP приложение — CI4 с тяжёлой бизнес-логикой. PHP-FPM воркеры потребляют память по-разному в зависимости от endpoint'а. Лёгкий API — 40MB. Тяжёлый отчёт — 380MB. Мы выставили limits.memory: 512Mi и думали, что этого хватит. Ночью запустился cron-джоб, который генерировал ежемесячные отчёты. Каждый воркер под отчёт — ~380MB. PHP-FPM с 8 воркерами = 3GB. Лимит пода — 512MB. OOMKilled Exit Code: 137 Под убит. k8s перезапускает. Новый под опять запускает отчёт. Опять OOMKilled. Restart loop. Кейс называется CrashLoopBackOff, и выглядит он в логах примерно так: pod/php-app-7d9f8c-xk2p9 0/1 CrashLoopBackOff 14 47m Четырнадцать рестартов за 47 минут. k8s упорно пытался поднять под, PHP упорно пытался сожрать память, OOMKiller упорно его убивал. Это было похоже на зомби-апокалипсис в миниатюре. Решение: разделение воркеров Мы разделили PHP-FPM на два пула: ; /etc/php-fpm.d/www.conf — общий пул [www] pm = dynamic pm.max_children = 20 pm.max_requests = 500 ; /etc/php-fpm.d/heavy.conf — пул для тяжёлых операций [heavy] pm = ondemand pm.max_children = 4 pm.max_requests = 50 pm.process_idle_timeout = 10s И создали отдельный Deployment для heavy-операций с увеличенными лимитами: # heavy-deployment.yaml resources: requests: memory: "512Mi" cpu: "500m" limits: memory: "2Gi" cpu: "2000m" Nginx роутит по prefix: location /api/reports/ { fastcgi_pass heavy-php-fpm:9001; } location / { fastcgi_pass www-php-fpm:9000; } Элегантно? Не очень. Работает? Да. Инцидент #19: Liveness probe убивает продЭто был шедевр. Мы настроили liveness probe — k8s регулярно проверяет, жив ли под, и если нет — убивает и перезапускает: livenessProbe: httpGet: path: /health port: 80 initialDelaySeconds: 30 periodSeconds: 10 timeoutSeconds: 5 failureThreshold: 3 Endpoint /health возвращал 200 и JSON со статусами всех зависимостей: Redis, MySQL, очередь. Казалось бы — отлично. И вот в один прекрасный день MySQL реплика начала лагать (проблема с дисками). Запросы к реплике стали занимать 15-20 секунд. Наш /health endpoint проверял реплику, таймаут probe — 5 секунд. Итог: Liveness probe failed: Get "http://10.244.2.5/health": context deadline exceeded k8s решил, что под нездоров. Убил его. Поднял новый. Новый тоже упёрся в лагающую реплику. Тоже убит. В какой-то момент k8s убивал поды быстрее, чем они успевали принять трафик. Мы устроили собственноручный DDoS на наш прод с помощью liveness probe. Это надо уметь. Решение: Разделили liveness и readiness: # Liveness: только "жив ли процесс" livenessProbe: httpGet: path: /health/live # Проверяет только PHP-FPM ping port: 80 initialDelaySeconds: 30 periodSeconds: 30 timeoutSeconds: 2 failureThreshold: 5 # Readiness: "готов ли принимать трафик" readinessProbe: httpGet: path: /health/ready # Проверяет все зависимости port: 80 periodSeconds: 10 timeoutSeconds: 5 failureThreshold: 3 // CI4 Controller class HealthController extends BaseController { public function live(): ResponseInterface { // Только базовая проверка процесса return $this->response->setJSON(['status' => 'ok']); } public function ready(): ResponseInterface { $checks = [ 'database' => $this->checkDatabase(), 'redis' => $this->checkRedis(), 'queue' => $this->checkQueue(), ]; $healthy = !in_array(false, $checks, true); return $this->response ->setStatusCode($healthy ? 200 : 503) ->setJSON([ 'status' => $healthy ? 'ready' : 'degraded', 'checks' => $checks, ]); } } Теперь при проблемах с репликой поды переставали получать трафик (readiness failed), но не убивались (liveness — ok). Через 20 минут реплика восстановилась, readiness снова позеленела, трафик вернулся. Без единой 500-й ошибки. Инцидент #31: HPA и смерть от масштабированияHorizontal Pod Autoscaler — прекрасная вещь. Трафик растёт — поды добавляются. Трафик падает — поды убираются. Автоматически. Без участия человека. Кроме случаев, когда всё идёт не так. Мы настроили HPA по CPU: apiVersion: autoscaling/v2 kind: HorizontalPodAutoscaler metadata: name: php-app-hpa spec: minReplicas: 3 maxReplicas: 30 metrics: - type: Resource resource: name: cpu target: type: Utilization averageUtilization: 70 Ждём нагрузочного теста. Трафик растёт. HPA видит CPU 85% → добавляет поды. Новые поды стартуют, прогревают OPcache, пока прогреваются — CPU у них 90% → HPA добавляет ещё поды. Те тоже прогреваются → CPU опять высокий → ещё поды. Через 3 минуты у нас было 28 подов из максимальных 30. Они все одновременно прогревали OPcache, коннектились к MySQL, коннектились к Redis. MySQL задыхался от 28×20 = 560 новых соединений. Redis cluster не успевал. Прод лёг под весом собственного масштабирования. Решение: Добавить cooldown и stabilization: behavior: scaleUp: stabilizationWindowSeconds: 60 policies: - type: Pods value: 2 # Не более 2 подов за раз periodSeconds: 60 scaleDown: stabilizationWindowSeconds: 300 Использовать custom metrics (RPS), а не CPU: metrics: - type: Pods pods: metric: name: http_requests_per_second target: type: AverageValue averageValue: "300" Добавить PHP-FPM warming в startup probe: startupProbe: httpGet: path: /warmup port: 80 failureThreshold: 30 periodSeconds: 5 Endpoint /warmup прогревал OPcache и пул соединений. Пока startupProbe не вернула 200 — под не получал трафик и не учитывался в метриках HPA. ПросветлениеПосле 18 месяцев и 47 инцидентов я пришёл к простому выводу: Kubernetes не упрощает жизнь. Он переносит сложность из "как запустить" в "как правильно настроить". И это совершенно другой уровень сложности — более тонкий, более коварный, и требующий понимания системы на глубоком уровне. Ключевые правила, которые я вколотил в стену рядом с рабочим столом: Никогда image:latest — только иммутабельные теги Liveness ≠ Readiness — это разные вещи с разной ценой ошибки Resource limits — это не потолок, это граница жизни и смерти пода HPA с CPU — ловушка для PHP. Используйте RPS или custom metrics Один под не значит один процесс — PHP-FPM это N воркеров Chaos engineering — убивайте поды намеренно, пока это не сделает production И последнее: k8s — это не серебряная пуля. Это мощный инструмент с огромным количеством движущихся частей. Уважайте его, изучайте, читайте исходники при необходимости. И обязательно найдите коммьюнити — на ithub.uno, на форумах, на конференциях. Потому что некоторые грабли лучше подбирать чужим лбом. До следующего CrashLoopBackOff. 🤕
-
Есть вещи, которые меняют тебя как специалиста. Первый деплой в прод. Первый incident report, который ты пишешь в 3 ночи. И первый раз, когда ты видишь в логах Redis: CLUSTERDOWN Hash slot not served. Вот это последнее — особенное. После такого начинаешь иначе смотреть на жизнь, на архитектуру и на документацию, которую ты "почти дочитал". Сегодня расскажу про Redis Cluster в highload-продакшне. Без прикрас, без маркетинговых буклетов. Только боль, инсайты и несколько команд, которые спасли мне карьеру. Контекст: зачем вообще Redis ClusterК тому моменту мы уже года полтора успешно жили на одном Redis-инстансе с репликой. Всё было хорошо: 50GB данных, ~80,000 ops/sec в пике, latency стабильно под 1ms. Идиллия. Потом случился бизнес. Нас купили, влили денег, пользователей стало в пять раз больше. Нагрузка выросла до 380,000 ops/sec. Один Redis задыхался. CPU на инстансе — 94% (Redis однопоточный в плане основного event loop, напоминаю). Latency поползла вверх — 8ms, 15ms, 40ms... Решение очевидное: Redis Cluster. Шардирование данных по hash slots (всего 16384 слота) на несколько нод. Я читал документацию. Я смотрел туториалы. Я думал, что готов. Я не был готов. Первая попытка: наивнаяПоднял кластер из 3 мастеров + 3 реплик. Конфигурация нод: redis1 (master) — слоты 0-5460 redis2 (master) — слоты 5461-10922 redis3 (master) — слоты 10923-16383 redis4 (replica) — реплицирует redis1 redis5 (replica) — реплицирует redis2 redis6 (replica) — реплицирует redis3 Всё прекрасно работало на стейджинге. В прод переехали ночью. Первые два часа — тишина и красивые графики. Потом началось. Наш код активно использовал MGET, MSET и пайплайны. И вот тут — сюрприз из документации, которую я "почти дочитал": в Redis Cluster мульти-ключевые операции работают только если все ключи находятся в одном hash slot. CROSSSLOT Keys in request don't hash to the same slot Это сообщение я запомнил навсегда. Потому что половина нашего кода сыпала им как из ведра. Погружение в hash tagsRedis Cluster использует CRC16 от имени ключа для определения слота. Но если в ключе есть фигурные скобки {}, то для вычисления слота используется только содержимое скобок — это называется hash tag. # Эти ключи попадут в РАЗНЫЕ слоты: user:1:profile → slot 7638 user:1:settings → slot 2892 user:1:cart → slot 6899 # А эти — в ОДИН, потому что hash tag {user:1}: {user:1}:profile → slot 7638 {user:1}:settings → slot 7638 {user:1}:cart → slot 7638 Казалось бы, просто добавить фигурные скобки и всё. Но у нас было 200+ мест в коде с генерацией ключей. И это был PHP-монолит, переписанный на CI4 модули. Кайф. Мы написали специальный класс-обёртку: <?php namespace App\Libraries\Cache; class ClusterAwareCacheKey { public static function userScoped(int $userId, string $suffix): string { return sprintf('{user:%d}:%s', $userId, $suffix); } public static function sessionScoped(string $sessionId, string $suffix): string { return sprintf('{session:%s}:%s', $sessionId, $suffix); } public static function globalKey(string $key): string { // Глобальные ключи не группируем — пусть шардируются равномерно return $key; } } И CI4 Cache Driver, который умеет работать с Cluster: <?php namespace App\Libraries\Cache; use CodeIgniter\Cache\Handlers\RedisHandler; class RedisClusterHandler extends RedisHandler { protected \RedisCluster $redis; public function initialize(): void { $config = config('Cache'); $this->redis = new \RedisCluster( null, $config->redisClusterNodes, $config->redisTimeout, $config->redisReadTimeout, true, // persistent $config->redisAuth ); $this->redis->setOption(\Redis::OPT_SERIALIZER, \Redis::SERIALIZER_IGBINARY); } public function getMultiple(array $keys, mixed $default = null): array { // Группируем ключи по слотам для batch-операций $slotGroups = $this->groupBySlot($keys); $result = []; foreach ($slotGroups as $slotKeys) { $values = $this->redis->mget($slotKeys); foreach ($slotKeys as $i => $key) { $result[$key] = $values[$i] !== false ? $this->unserialize($values[$i]) : $default; } } return $result; } private function groupBySlot(array $keys): array { $groups = []; foreach ($keys as $key) { $slot = $this->calculateSlot($key); $groups[$slot][] = $key; } return array_values($groups); } private function calculateSlot(string $key): int { // Извлекаем hash tag если есть if (preg_match('/\{([^}]+)\}/', $key, $matches)) { $key = $matches[1]; } return crc32($key) & 0x3FFF; // 16384 слота } } Второй уровень ада: failoverМы починили CROSSSLOT. Живём. Счастливы. Три недели тишины. Потом у нас умер сервер. Не виртуалка, не под — физический сервер. Просто взял и умер в 14:22 в среду. На нём жили redis2 (мастер) и redis5 (реплика redis1, то есть другого мастера). Вот тут начался настоящий thriller. Redis Cluster должен автоматически делать failover: реплика замечает, что мастер недоступен, объявляет выборы, становится новым мастером. Это работает. Но есть нюанс, который я знал теоретически и совершенно недооценил практически. Время failover — от 15 до 30 секунд. Пятнадцать секунд, в течение которых слоты 5461-10922 не обслуживаются. При 380,000 ops/sec. Можете себе представить, как выглядел error rate в эти 15 секунд? Error rate: 0.1% → 34% → 67% → 89% → 67% → 12% → 0.3% Наш PHP-код в CI4 при ошибке Redis просто падал с exception. Никакого graceful degradation. Никакого fallback на БД. Просто 500-е ответы. Вот это был момент просветления. Решение: Circuit Breaker для RedisМы реализовали паттерн Circuit Breaker специально для Redis. В CI4 это элегантно делается через Service Container: <?php namespace App\Libraries\Cache; class ResilientCacheService { private const FAILURE_THRESHOLD = 5; private const RECOVERY_TIMEOUT = 30; private const HALF_OPEN_MAX_CALLS = 3; private string $state = 'closed'; // closed | open | half-open private int $failureCount = 0; private int $lastFailureTime = 0; private int $halfOpenCalls = 0; public function __construct( private readonly RedisClusterHandler $redis, private readonly \CodeIgniter\Cache\CacheInterface $fallback ) {} public function get(string $key, mixed $default = null): mixed { if ($this->isOpen()) { return $this->fallback->get($key, $default); } try { $value = $this->redis->get($key); $this->onSuccess(); return $value ?? $default; } catch (\Throwable $e) { $this->onFailure($e); return $this->fallback->get($key, $default); } } public function set(string $key, mixed $value, int $ttl = 0): bool { if ($this->isOpen()) { return $this->fallback->set($key, $value, $ttl); } try { $result = $this->redis->save($key, $value, $ttl); $this->onSuccess(); return $result; } catch (\Throwable $e) { $this->onFailure($e); return $this->fallback->set($key, $value, $ttl); } } private function isOpen(): bool { if ($this->state === 'open') { if (time() - $this->lastFailureTime > self::RECOVERY_TIMEOUT) { $this->state = 'half-open'; $this->halfOpenCalls = 0; return false; } return true; } return false; } private function onSuccess(): void { if ($this->state === 'half-open') { $this->halfOpenCalls++; if ($this->halfOpenCalls >= self::HALF_OPEN_MAX_CALLS) { $this->state = 'closed'; $this->failureCount = 0; } } elseif ($this->state === 'closed') { $this->failureCount = max(0, $this->failureCount - 1); } } private function onFailure(\Throwable $e): void { $this->lastFailureTime = time(); $this->failureCount++; if ($this->state === 'half-open' || $this->failureCount >= self::FAILURE_THRESHOLD) { $this->state = 'open'; log_message('critical', 'Redis Circuit Breaker OPEN: ' . $e->getMessage()); } } } Регистрируем в Services: // app/Config/Services.php public static function resilientCache(bool $getShared = true): ResilientCacheService { if ($getShared) { return static::getSharedInstance('resilientCache'); } return new ResilientCacheService( new RedisClusterHandler(), new FileHandler() // filesystem как fallback ); } Теперь при падении Redis кластера приложение продолжало работать — медленнее, с filesystem кэшем, но без 500-х ошибок. Error rate во время следующего (учинённого намеренно!) failover теста: 0.8%. Против 89% до. Третий круг: Memory fragmentationЭто тихий убийца. Redis работает, данные записываются и читаются, но потихоньку mem_fragmentation_ratio ползёт вверх. redis-cli --cluster call all-nodes INFO memory | grep mem_fragmentation_ratio Через полгода работы я увидел значение 2.47. Норма — от 1.0 до 1.5. Значение 2.47 означает, что Redis использует в 2.47 раза больше памяти, чем реально нужно для данных. На наших 80GB инстансах это ~50GB впустую. Причина — интенсивные операции записи/удаления ключей с разным TTL, что приводит к фрагментации heap у jemalloc. Решение — Active defragmentation: redis-cli CONFIG SET activedefrag yes redis-cli CONFIG SET active-defrag-ignore-bytes 100mb redis-cli CONFIG SET active-defrag-threshold-lower 10 redis-cli CONFIG SET active-defrag-threshold-upper 100 redis-cli CONFIG SET active-defrag-cycle-min 25 redis-cli CONFIG SET active-defrag-cycle-max 75 Через сутки mem_fragmentation_ratio опустился до 1.18. Мы вернули ~45GB памяти. Без перезапуска. В прод. Итог и выводыRedis Cluster — мощнейший инструмент, но он требует понимания на уровне "читал исходники, а не только README". Мои главные уроки: Hash tags планируйте заранее, не когда уже CROSSSLOT в логах Failover длится 15-30 секунд — ваш код должен это переживать Circuit Breaker — обязательный паттерн, не опциональный Мониторьте mem_fragmentation_ratio — без этого потеряете память Multi-key операции — только в одном слоте — это не баг, это дизайн Latency в cluster выше, чем в standalone — заложите это в SLA Если вы тоже занимаетесь highload и Redis — заходите на ithub.uno, там есть живые обсуждения именно таких кейсов. Без теории ради теории, только production experience. Удачи с кластерами. И пусть ваши слоты всегда будут served. 🔴✅
-
Привет, коллеги по несчастью. Меня зовут Максим, я продуктовый DevOps с десятью годами шрамов на психике и подгоревшим нервным окончанием там, где у нормальных людей находится чувство покоя. Сегодня я расскажу вам историю, которую в каждой IT-компании мира знают наизусть, но всё равно каждый раз проживают как первый раз. Историю о том, как прод падает именно тогда, когда тебе это меньше всего нужно. Итак. Декабрь. Пятница. Мы только что задеплоили «маленький hotfix» — ну там, буквально пять строчек, ничего серьёзного. Я уже мысленно дома, уже открываю холодильник, уже слышу шипение открываемой банки. И тут — дзынь. Алерт в Telegram. Потом ещё один. Потом ещё пять. Потом просто поток, как будто кто-то открыл кран с тревогами. 🔴 CRITICAL: Response time > 30s 🔴 CRITICAL: Error rate 78% 🔴 CRITICAL: Database connections exhausted 🔴 CRITICAL: Redis timeout 🔴 CRITICAL: Payment service unreachable Пять алертов за 40 секунд. Это рекорд, кстати. Я горжусь. Анатомия катастрофыТеперь давайте по-серьёзному, потому что случай был действительно интересный с технической точки зрения, и на ithub.uno такие постморtem-разборы ценятся. Итак, что мы имели на тот момент: Стек: PHP 8.2, CodeIgniter 4.5, MySQL 8.0 (кластер primary + 2 replica), Redis 7.0 Cluster, Nginx, всё это добро в k8s на трёх нодах Трафик: ~3500 RPS в пике, средний — около 800 RPS Hotfix: изменили одну строчку в модели, которая отвечала за выборку пользовательских настроек Что могло пойти не так? Всё. Абсолютно всё. Первое, что я сделал — зашёл на Grafana. Там картина маслом: RPS упал с 800 до 120, латентность взлетела с 80ms до 28 секунд (ДВАДЦАТИ ВОСЬМИ, Карл!), количество активных connections к MySQL упёрлось в потолок — 500/500, CPU на всех подах — 95%+. Классический симптом. Я такое уже видел. Это называется «connection pool exhaustion» в сочетании с «slow query лавиной». Но причина была нетривиальной. КопаемПервым делом — slow query log на MySQL: SET GLOBAL slow_query_log = 'ON'; SET GLOBAL long_query_time = 0.1; Через 30 секунд смотрю лог и вижу: SELECT u.*, us.*, p.*, pr.*, c.* FROM users u LEFT JOIN user_settings us ON us.user_id = u.id LEFT JOIN profiles p ON p.user_id = u.id LEFT JOIN preferences pr ON pr.user_id = u.id LEFT JOIN cart c ON c.user_id = u.id AND c.status = 'active' WHERE u.id = 12345 Запрос сам по себе несложный. Выполняется за 0.003 секунды. Но... EXPLAIN показывает Using temporary; Using filesort на таблице cart. И вот тут начинается детективная история. Дело в том, что за час до деплоя наш аналитик (земля ему пухом) запустил миграцию, которая добавила в таблицу cart новое поле meta_json TEXT. При этом индекс idx_cart_user_status не пересоздавался. Он просто... перестал эффективно работать после изменения статистики таблицы. MySQL решил, что full scan выгоднее. При этом таблица cart содержала 47 миллионов строк. А наш «маленький hotfix»? Он убрал кэширование этого запроса. Буквально одну строку: // Было: return cache()->remember('user_data_' . $userId, 300, fn() => $this->buildUserData($userId)); // Стало (hotfix убрал кэш "для дебага"): return $this->buildUserData($userId); И вот оно. Идеальный шторм. Медленный запрос × отсутствие кэша × высокий трафик = прод в нокауте. Решение в боевых условияхВремени на красивые решения нет. Алгоритм действий: Шаг 1: Feature flag У нас есть система feature flags на Redis. Мгновенно включаю maintenance mode для новых пользователей, пропуская залогиненных: // CI4 Filter class MaintenanceFilter implements FilterInterface { public function before(RequestInterface $request, $arguments = null) { if (cache()->get('maintenance_mode') && !auth()->check()) { return redirect()->to('/maintenance'); } } } Трафик упал на 40%. Дышим. Шаг 2: Откат kubectl rollout undo deployment/app --to-revision=15 Это не решение проблемы с индексом, но снимает острую боль — кэш вернулся, запросы снова летают. Шаг 3: Экстренное создание индекса Пока прод восстанавливается, параллельно: -- На реплике сначала тестируем CREATE INDEX idx_cart_user_status_new ON cart(user_id, status) INCLUDE (id, created_at, meta_json) ALGORITHM=INPLACE, LOCK=NONE; ALGORITHM=INPLACE, LOCK=NONE — это не просто красивые слова. На таблице в 47 миллионов строк это разница между «индекс создаётся 4 минуты без локов» и «БД заблокирована на 25 минут, прощайте». Через 6 минут индекс на реплике. Тестируем — запрос летает за 1.2ms. Прогоняем на primary. Ещё 4 минуты. Готово. Шаг 4: Хотфикс хотфикса return cache()->remember('user_data_' . $userId, 300, fn() => $this->buildUserData($userId)); Да, просто вернули строку обратно. Иногда лучшее решение — отмотать назад. Постмортем и урокиЧерез два дня я провёл постмортем. Вот ключевые выводы, которые я теперь вколачиваю в голову каждому новому разработчику: 1. Никогда не убирайте кэш "для дебага" в прод Это как снять шлем "чтобы лучше видеть". Дебажьте на стейджинге. Там специально и создано это место. 2. Любая миграция схемы БД требует аудита индексов Мы внедрили правило: к каждому PR с миграцией прилагается EXPLAIN до и после на production-like данных (у нас есть анонимизированный дамп). 3. Алерты должны быть actionable Пять одновременных алертов — это не пять проблем. Это одна проблема с пятью симптомами. Мы перенастроили alertmanager с группировкой и подавлением дублей. 4. Connection pool — ваш первый друг и первый враг В CI4 мы теперь явно конфигурируем пул: // app/Config/Database.php public array $default = [ 'DBDriver' => 'MySQLi', 'hostname' => env('DB_HOST'), 'pconnect' => false, // persistent connections OFF в highload! 'DBDebug' => false, // ... ]; Persistent connections в highload — это бомба замедленного действия. Отключайте. 5. Chaos engineering — не роскошь, а необходимость После этого инцидента мы раз в квартал намеренно убиваем случайный под в прод-кластере. Да, в проде. Нет, это не безумие — это единственный способ убедиться, что система действительно resilient. ФиналВ 01:23 прод поднялся полностью. Показатели вернулись к норме. Я наконец открыл ту банку. Она была тёплой. Но знаете что? Этот инцидент стоил нам примерно $4,000 потерянной выручки и несколько седых волос. Зато мы получили бесценный опыт и полностью переработали процесс деплоя. Теперь у нас есть автоматическая проверка slow queries перед каждым деплоем, обязательный review индексов при миграциях и — самое главное — правило: никаких деплоев в пятницу после 18:00. Это правило нарушают только те, кто ещё не прожил свою первую пятничную аварию. После первой — никогда.
-